

57 Сферическое движение тела
Сферическим движением(движением тела с одной закрепленной точкой) называется такое движение тела, при котором одна его точка О остается неподвижной во все время движения. Все остальные точки тела движутся при этом по траекториям, расположенным на поверхности сфер с центром в неподвижной точке О. Положение тела определяется углами Эйлера (рис. 1): углом прецессии φ, углом нутации θ и углом собственного вращения φ. Эти углы характеризуют положение координатного трехгранника осей Oξηζ, связанного с телом, по отношению к неподвижному трехграннику Oxyz. Линия ON пересечения координатных плоскостей Оху и Oξη называется линией узлов.
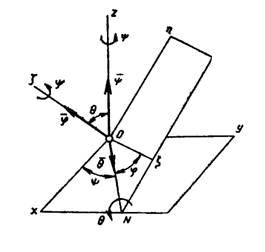
Рисунок 1.
Уравнения сферического движения:
![]()
РАСПРЕДЕЛЕНИЕ
СКОРОСТЕЙ. Во всякий
момент времени существует проходящая
через неподвижную точку О прямая OΩ,
скорости точек которой равны нулю. Это
мгновенная ось вращения. Мгновенная
угловая скорость ![]() определяется
соотношением
определяется
соотношением
![]()
где ![]() -
векторы, численно равные производным
углов Эйлера и направленные соответственно
по осям z, ON и ζ. Мгновенная угловая
скорость может менять свое положение
в пространстве, описывая коническую
поверхность, поэтому вектор углового
ускорения
-
векторы, численно равные производным
углов Эйлера и направленные соответственно
по осям z, ON и ζ. Мгновенная угловая
скорость может менять свое положение
в пространстве, описывая коническую
поверхность, поэтому вектор углового
ускорения
![]()
в общем
случае не совпадает по направлению
с ![]() (рис.
2).
(рис.
2).
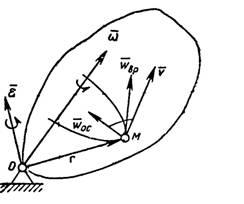
Рисунок 2.
Скорость точки при сферическом движении тела
![]()
или в аналитической форме (формулы Эйлера):
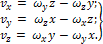
Ускорение
точки складывается из осестремительной ![]() и
вращательной
и
вращательной ![]() составляющих
(рис. 2):
составляющих
(рис. 2):
![]()
58. Формулы Пуассона.
При рассмотрении вращательного движения тела вокруг неподвижной оси получена векторная формула Эйлера, по которой скорости точек тела полностью характеризуются общей для всех точек тела угловой скоростью вращения и расположением точек тела относительно оси вращения.
Cкоростьvкакой-либо точки М тела , по векторной формуле Эйлера:
υ= ω* r
Скорость какой-либо точки можно вычислить как первую производную по времени от радиуса-вектора г этой точки, проведенного из неподвижной точки. С другой стороны, скорость точки тела, вращающегося вокруг неподвижной точки, можно вычислить по векторной формуле Эйлера. Следовательно, производная по времени от радиуса-вектора любой точки твердого тела, вращающегося вокруг неподвижной точки, определится по формуле
dr/dt=ω*r
Длина радиуса-вектора г как расстояние между двумя точками твердого тела является постоянной величиной при движении этого тела. Следовательно, равенство dr/dt=ω*r можно рассматривать как формулу для вычисления производной по времени от вектора, модуль которого постоянен, и изменение этого вектора происходит только вследствие вращения его с угловой скоростью ш вместе с телом вокруг неподвижной точки.
Если взять подвижную систему координат Oxyz, скрепленную с телом, которое вращается вокруг неподвижной точки с угловой скоростью ω, то для единичных векторов i, j,kнаправленных по этим осям координат, как для векторов, модули которых постоянны имеем:
di//dt = ω*i ; dj/dt = ω *j; dk/dt = ω*k
Эти формулы называют формулами Пуассона.
59. Общий случай движения свободного твердого тела.
Любое движение свободного твердого тела
можно заменить совокупностью поступательных движений
вместе с какой-либо точкой тела и вращений вокруг этой
точки, совершаемых за то же время, что и истинное движение.
Поступательное движение вместе с точкой тела и подвижной системой координат является переносным движением, а движение тела относительно этой подвижной системы координат, являющееся в каждый момент времени вращением
вокруг своей мгновенной оси, проходящей через эту подвижную
точку тела, есть относительное движение.
Любое движение свободного твердого тела можно
составить из поступательного движения вместе с подвижной
системой координат и сферического движения относительно
этой системы координат. Для относительного сферического
движения можно ввести угловую скорость и угловое
ускорение, которое является первой производной по времени как в случае вращения тела вокруг неподвижной точки. Угловую скорость и угловое ускорение относительного вращательного движения вокруг какой-либо точки тела на-
называют в общем случае угловой скоростью и угловым ускорением свободного твердого тела. Эти величины не зависят от выбора точки тела. От выбора точки тела зависит только переносное поступательное движение тела.