

Литература:
Микропроцессорные системы автоматического управления – под редакцией Биссергерского В.А.. Москва, Машиностроение, 1980 год.
Микропроцессорные автоматические системы регулирования. Основы теории и элементы – под редакцией Солодовников В.В.. Москва, Высшая школа, 1991 год.
Теория и проектирование микропроцессорных устройств – Куо Бенджамин. Москва, Машиностроение, 1987 год.
Особенности микропроцессорных устройств управления
Основные достоинства:
1) гибкость;
2) стоимость;
3) надёжность;
4) масса-габаритные показатели.
Можно выделить как реализация сложных законов управления.
1) оптимальное и адаптивное управление;
2) стабильность параметров;
3) возможность хранения информации с целью анализа поведения системы расчёта параметров и оценки состояния объектов, уменьшение количества датчиков;
4) уменьшение количества линий связи, удобная стыковка цифровых систем;
5) пониженное энергопотребление, самодиагностика и самоналадка.
Любая система включает объект управления. Силовые элементы позволяет направлять энергию. Ест согласующий усилитель и подаётся на исполнительные устройства. Помехи сглаживает фильтр низкой частоты, но его недостаточно. Есть устройство сопряжения с объектами (УСО).
Рисунок 1 – 02.09.2014.
Функции устройства управления:
1) чтение;
2) обработка;
3) выдача управляющих сигналов или воздействий.
Задачи устройств правления выполняются в режиме сканирования и весь процесс устроен по принципу сканирования. Чтение обработкавыдача. Для осуществления процесса управления необходимо обеспечивать работу устройства в реальном масштабе времени. Выдача сигналов должна соответствовать состоянию объекта.
Период сканирования определяется постоянными времени объекта.
Ввод/вывод дискретных сигналов
Прежде всего дискретные датчики. Самый простой – контакт. Есть ещё оптоэлектронные датчики.
Рисунок 2 – 09.09.2014
Дискретные исполнительные устройства: катушки исполнительного механизма.
Защитные цепи (защита по току). Это цепи защиты от перенапряжения (обратные диоды).
Системы аналоговых ввода/вывода
Аналоговые датчики. Это датчики, которые формирую информационный сигнал в виде напряжения, либо тока, изменяющегося в определённых пределах.
Построение цепи или измерительных включает в себя расчёт коэффициента усиления, частотную коррекцию, организацию соответствующего элемента, как правило, на базе операционного усилителя.
Вывод аналоговых сигналов
Достаточно редко используются, чаще всего их заменяют ШИМ-модулированными сигналами. Для вывода непосредственного сигнала используется ЦАП. Подключение внешнего ЦАП осуществляется либо через порты, либо используя внутри платные интерфейсы.
Обработка аналогового сигнала – сложная задача.
1. Программный метод.
2. Система прерываний. Способ программно-аппаратный. Таким устройством является таймер. Один из наиболее эффективных способов.
3. Аппаратный. В основном для вывода используется.
Функции связи с оператором. Индикация. Клавиатура
1. Линейная клавиатура.
Каждая клавиша подаётся на свой вход.
2.Матричная клавиатура.
Обычно делается, если кнопок больше 6.
Отображение информации
Есть несколько способов вывода информации:
1. Использование дискретных светодиодов.
2. Матрица светодиодов. Делают наборы из семи сегментных индикаторов.
Есть статическая и динамическая индикация (в определённое время).
3. Сенсорные панели.
Ёмкостные сенсорные панели.
Резистивные панели. Резистивные плёнки.
Более совершенные ёмкостно-проекционные плёнки.
Особенности МП систем регулирования

Рисунок 3 – 14:27 23.09.2014.
Допустим, у нас есть некий объект управления, который описывается передаточной функцией. Регулятор теперь цифровое корректирующее устройство (ЦКУ).
Период дискретизации процесса – время между открытием и закрытием входа/выхода.
АЦП преобразует сигнал датчика в цифровой код. Экстраполятор нулевого порядка (на рисунке Э).
Цифро-аналоговые системы регулирования
Наличие двух элементов, срабатывающих в определённое время - квантователей. Показывают, что система является импульсной. Имеет ступенчатую функцию. Система считается нелинейной. Наличие экстраполятора говорит о том, что мы выдаём сигнал не на то состояние, которое есть, а на то состояние, которое будет – у нас будет определённая задержка. Система ЦА МП регулирования создаёт задержку, вызванной необходимость производить вычисления выходного управляющего сигнала – вычислительная задержка.
Математическое описание МП систем регулирования.
Функция, определённая только в определённо моментом времени называется решетчатой функцией.

Есть такое понятие как разность:

Вводим дифференциалы более высоких порядков:


Аналогично более высоким порядкам.
Процессы в импульсных системы описываются с помощью разностных уравнений. Преобразование Лапласа выполняется с целью преобразования дифференциальных уравнение в алгебраические с целью описания системы. По сути, при переходе от ДУ в А происходит переход области из временной в частотную.
Вводятся дискретные преобразования Лапласа, либо z-преобразования.

Z-преобразование позволяет преобразовать цифровое корректирующее устройство. Чаще всего по ней строится алгоритм управляющей программы.




Блок-схема алгоритма:
1) чтение
 ,
, ;
;
2) чтение
 в чём-то или где-то;
в чём-то или где-то;
3) вычисление
 ;
;
4) вывод
 ;
;
5) Что-то xиyи что-то и
и ;
;
6) определение
 .
.
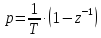
Как получить передаточную z-функцию.
Задача синтеза – выбор корректирующего устройства.
1. Непрерывный прототип.
2. По псевдо частотным характеристикам.
3. Используя теорию оценки систем управления.
4. Используя теорию пространства состояний.
5. Fuzzy-управление – использование аппарата нечёткой логики.
Выбор частоты дискретизации – теорема Котельникова-Шеннона.
Любой непрерывный сигнал можно восстановить по его отсчётам, взятый с частотой, взятой в 2 раза выше, чем частота граничного сигнала.
Частота дискретизации выбирается из постоянной объекта с учётом времени переходного процесса.

2) необходимо выбирать таким ЦАП и АЦР, чтобы они не влияли на точность регулирования.
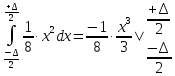
Заменяется 33 составляющими:
1. Линейной.
Накладывается пилообразная составляющая и делается ограничение. Характеризуется коэффициентом преобразования – отношение размаха входного напряжения к цифре максимальной:


Пилообразная составляются обычно рассматривается как шум (возмущение). Есть понятие дисперсия шума.
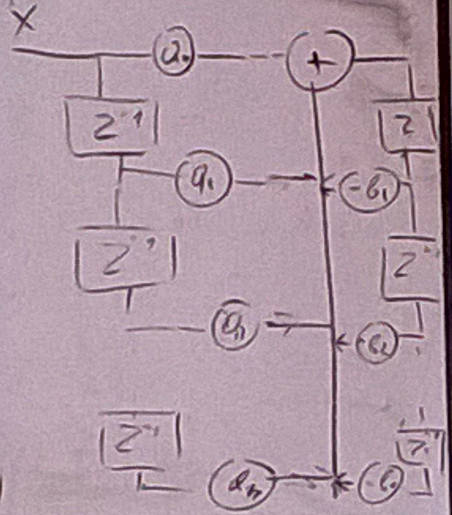
Рисунок 14:44 07.10.2014
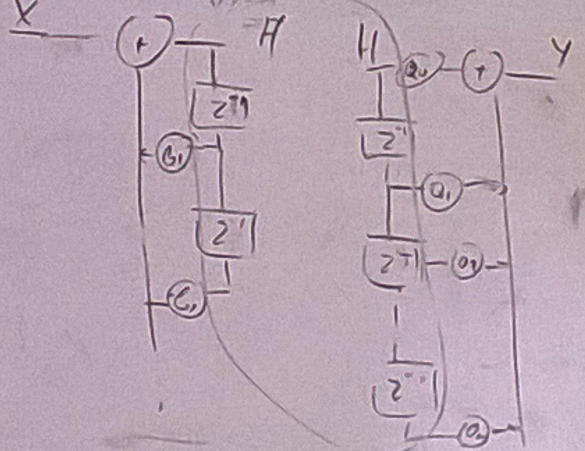
Рисунок 14:52 07.10.2014

2. Экстраполятор нулевого порядка. Есть импульсная передаточная функция (реакция звена на единичный импульс, площадь единица).

Экстраполятор - это практически фильтр низких частот.
3. Что-то ещё.
Методика, анализ и синтез по непрерывному прототипу
1. Определяются условия, когда система цифровая может быть рассмотрена как непрерывная (определяется частота дискретизации и разрядность преобразователей ЦАП и АЦП).
2. Определяет
передаточная функция регулятора
непрерывной системы с учётом передаточной
функции экстраполятора. Передаточная
функция регулятора преобразуется в
передаточную функцию дискретного
корректирующего устройства. Для этого
параметр
 заменяется функцией от
заменяется функцией от .
.




Поэтому чаще всего используются следующие виды замен:

3. По z-передаточной функции строится цифровой фильтр, который реализуется программно в виде алгоритма.
4. Реализуется система с соответствующей аппаратной частью и программным обеспечением.
Цифровые фильтры
Вот такое звено называется цифровым фильтром:

Условие реализуемости – значения на выходе не должны зависеть от будущих значений на входе.
Знаменатель называется характеристическим уравнением цифрового фильтра. Нули этого уравнения определяют статические и динамические свойства.



Цифровые фильтры бывают рекурсивные (зависимость на выходе зависит от сигналов на входе и в предыдущие входы) и не рекурсивные (зависимость на выходе определяется только значениями на входе).
Есть фильтры с конечной импульсной характеристикой (КИХ) и с бесконечной импульсной характеристикой (БИХ).
Прямая форма цифрового фильтра.
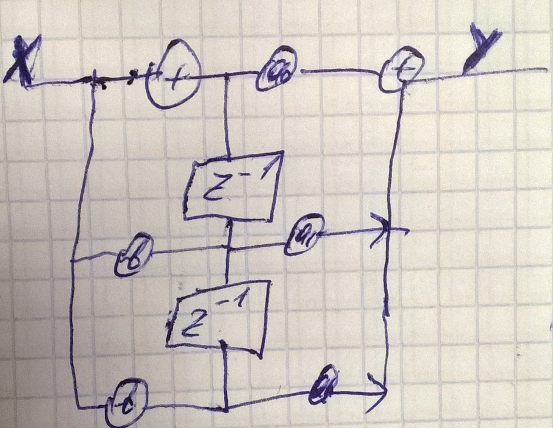
Рисунок – 14:54 07.10.2014
Входной сигнал x. Все сигналы суммируются.
Каноническая форма цифрового фильтра.

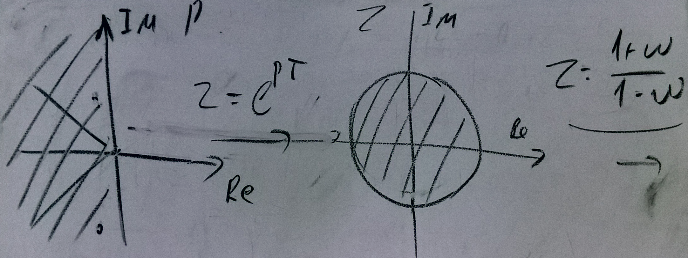
Рисунок 15:11 07.10.2014
Рисунок 15:11 07.10.2014
Параллельная форма цифрового фильтра.
Аналогичная вводится последовательная форма цифрового фильтра. Отличие в том, что это выражение можно представить в виде произведения.
Совокупность внутренних параметров позволяет прогнозировать изменение выходного сигнала в последеющие моменты времени и образует пространство-состояние.




Можно организовывать системы адаптивного управления с использованием эталонных (программных) моделей.
Модальное управление.
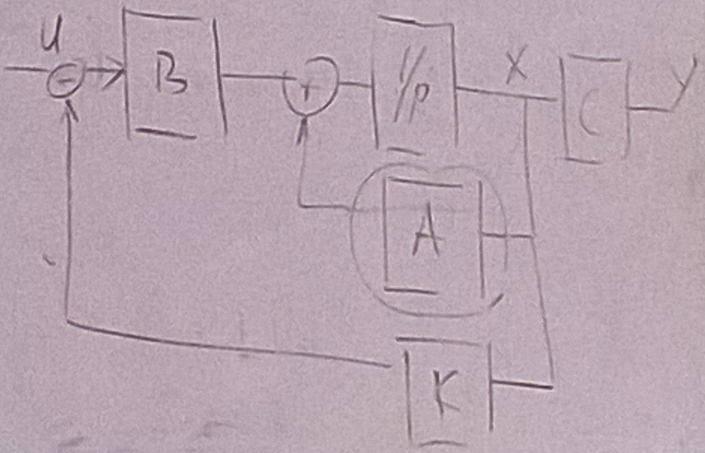
Рисунок 15:54 07.10.2014