

2.2 Визначення координат точки оберненою кутовою засічкою
Початкові дані.
Координати початкових пунктів :
Х1 = 193,910 м ; Х2 = 216,301 м ; Х3 = 236,601 м.
Y1 = 182,151 м ; Y2 = 181,772 м ; Y3 = 181,452 м.
Значення виміряних кутів:
Варіант
1 :
![]() 1
= 430
5910011
,
1
= 430
5910011
,
![]() 2
= 3000710011.
2
= 3000710011.
Варіант
2:
![]() 1
= 300
581
0011,
1
= 300
581
0011,
![]() 2
= 4001810011.
2
= 4001810011.
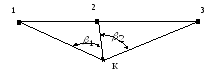
Рисунок - Схема зворотної кутової засічки.
Послідовність виконання роботи.
2. Обчислити координати пункту по формулах:
m = X1 + (Y1 - Y2) ctgв1 ;
n = Y1 + (X2 - X1) ctgв1 ;
![]() ;
;
![]() ;
;
![]() :
:
![]() ;
;
де X1, Y1, X2, Y2, X3, Y3 - координати початкових пунктів, нумерація яких повинна зростати по ходу годинникової стрілки щодо пункту, координати якого визначаються;
β1, β2 – виміряні кути.
2.3. Оцінка точності визначуваного пункту к по формулах:
ΔΥ1 = Υ1 - ΥΚ ; ΔΥ2 = Υ2 - ΥΚ ; ΔΥ3 = Υ3 - ΥΚ ;
ΔY1 = Y1 - Yk; ΔY2 = Y2 - Yk; ΔY3 = Y3 - Yk;
S![]() = ΔX
= ΔX![]() + ΔY
+ ΔY![]() ; S
; S![]() = ΔX
= ΔX![]() + ΔY
+ ΔY![]() ; S
; S![]() = ΔX
= ΔX![]() + ΔY
+ ΔY![]() ;
;

![]()
![]()
MK
=
![]()
де mβ - середня квадратична погрішність вимірювання кутів теодолітом.
При обчисленні коефіцієнтів а і b лінійні величини S, ΔX, ΔY достатньо визначати повністю до 1 м.
2.4. Викреслити схему засічки в масштабі 1:1000 (або 1:2000, з нанесенням координатної сітки).
3 . Побудова еліпса похибок положення пункту, що визначається
3.1 Еліпс похибок найповніше і строго характеризує точність положення пункту.
Елементи еліпса погрішностей (рис.2) обчислюються по наступних формулах:
tg
2Θ
=
![]() (4)
(4)
q
=
![]() (5)
(5)
А
=
![]()
B
=
![]() ;
(6)
;
(6)
![]() ,
(7)
,
(7)
де Θ - дирекційний кут великої осі еліпса похибок;
А і В - відповідно велика і мала напівосі еліпса, м;
МН - середня похибка (зсув) пункту по заданому напряму, м;
α - дирекційний кут цього напрямку;
![]() -
кут між великою напіввіссю еліпса і
даним напрямом.
-
кут між великою напіввіссю еліпса і
даним напрямом.
3.2. Послідовність виконання роботи.
Для пункту, координати якого визначені кутовою засічкою побудувати еліпс похибок в наступному порядку:
- по формулах (3) визначити кореляційний момент КХУ і погрішності КХХ і КYY;
- по формулах (5) - (7) обчислити елементи еліпса похибок;
- по одній з формул (6) визначите положення двох-трьох проміжних точок еліпса (які не лежать на його осях) з інтервалом 20-250;
- викресліти еліпс похибок у масштабі 1:2 (або 1:3).
Креслення еліпса можна сумістити із схемою зворотної засічки.
Таблиця 1 Обчислення координат у зворотній кутовій засічці
|
№ |
Параметр |
Значення |
№ |
Параметр |
Значення |
|
1 |
Х1 |
193,910 м |
17 |
ctgβ2 |
1,7239348 |
|
2 |
Y1 |
182,151 |
18 |
(15)х(17) |
-0,552 |
|
3 |
Y2 |
181,772 |
19 |
(18) - Х3 |
-237,153 |
|
4 |
(Y1 – Y2) |
+0,379 |
20 |
(19) + m (чисельн) |
-42,851 |
|
5 |
tgβ1 |
0,96512677 |
21 |
Х3 - Х2 |
+20,300 |
|
6 |
ctgβ1 |
1,0361341 |
22 |
(22) х ctgβ2 |
+34,995 |
|
7 |
(Y1 – Y2) ctgβ1 |
+0,392 |
23 |
(21)+ Y3 – n (знамен) |
+11,097 |
|
8 |
m |
194,302 |
24 |
|
-3,861494 |
|
9 |
X2 |
216,301 |
25 |
|
-21,999 |
|
10 |
(X2 – X1) |
+22,391 |
26 |
|
+23,597 |
|
11 |
(X2 – X1) ctgβ1 |
+23,200 |
27 |
|
-91,050 |
|
12 |
n |
205,351 |
28 |
|
15,910 |
|
13 |
Х3 |
236,601 |
29 |
|
-7,105 |
|
14 |
Y3 |
181,452 |
30 |
|
+27,436 |
|
15 |
Y3-Y2 |
-0,320 |
31 |
|
209,196 |
|
16 |
tgβ2 |
0,5800684 |
32 |
|
209,207 |
Таблиця 2 Оцінка точності у зворотній кутовій засічці
|
№ |
Параметр |
Значення |
№ |
Параметр |
Значення |
|
1 |
ХК |
209 |
20 |
ΔХ23 |
729 |
|
2 |
YK |
209 |
21 |
ΔY3 |
-28 |
|
3 |
Х1 |
194 |
22 |
ΔY23 |
784 |
|
4 |
Y1 |
182 |
23 |
S23 |
1523 |
|
5 |
Х2 |
216 |
24 |
А1 |
-0,028019 |
|
6 |
Y2 |
182 |
25 |
А2 |
-0,034150 |
|
7 |
Х3 |
237 |
26 |
А3 |
-0,018219 |
|
8 |
Y3 |
181 |
27 |
В1 |
-0,015828 |
|
9 |
ΔХ1 |
-15 |
28 |
В2 |
+0,008846 |
|
10 |
ΔХ21 |
225 |
29 |
В3 |
+0,018014 |
|
11 |
ΔY1 |
-27 |
30 |
|
+0,006130 |
|
12 |
ΔY21 |
729 |
31 |
|
-0,024674 |
|
13 |
S21 |
966 |
32 |
|
+0,015931 |
|
14 |
ΔХ2 |
+7 |
33 |
|
0,0091676 |
|
15 |
ΔХ22 |
49 |
34 |
|
6875 |
|
16 |
ΔY2 |
-27 |
35 |
|
+0,000056197 |
|
17 |
ΔY22 |
729 |
36 |
|
-0,00039308 |
|
18 |
S |
803 |
37 |
|
0,000449 |
Продовження таблиці
|
19 |
ΔХ3 |
+27 |
38 |
|
3,089 |
|
39 |
|
9,54 |
49 |
|
0,00003052 |
|
40 |
|
0,0006088 |
50 |
|
-0,000151 |
|
41 |
|
0,0000842 |
51 |
|
+0,000146 |
|
42 |
(40)+(41) |
0,0006920 |
52 |
(50+(51) |
+0,0000050 |
|
43 |
|
0,0000726 |
53 |
|
0,000000524 |
|
44 |
|
0,0000726 |
|
MK
= |
0,010м |
|
45 |
|
0,0000375 |
55 |
|
0,0085м |
|
46 |
|
0,0002537 |
56 |
|
0,0055м |
|
47 |
(45)+(46) |
0,0002912 |
57 |
|
|
|
48 |
|
0,00003052 |
58 |
|
|
Таблиця
3 Визначення елементів еліпса похибок
![]()
|
№ |
Параметр |
Значення |
№ |
Параметр |
Значення |
|
1 |
|
0,0000726 |
14 |
|
0,5000 |
|
2 |
|
0,000000524 |
15 |
А2 |
0,00007225 |
|
3 |
|
0,00003052 |
16 |
|
0,00003612 |
|
4 |
|
0,000001048 |
17 |
|
0,707107 |
|
5 |
|
0,000042076 |
18 |
|
0,5000 |
|
6 |
(4)2 |
1,098х 10 -12 |
19 |
В2 |
0,00003136 |
|
7 |
(5)2 |
1х 10 -9 |
20 |
|
0,00001568 |
|
8 |
|
0,0000408 |
21 |
|
0,0072м |
|
9 |
|
0,00010312 |
22 |
|
0,0249073 |
|
10 |
(8)+(9) |
0,00014392 |
23 |
|
1,4260 |
|
11 |
|
0,0085м |
24 |
|
00,713 |
|
12 |
|
0,0056м |
|
|
|
|
13 |
|
0,707107 |
|
|
|

Рисунок - Схема побудови еліпсу похибок

Рисунок - Елементи еліпса похибок.
3.3 Спрощена оцінка точності оберненої кутової засічки

Рисунок - До спрощеної оцінки точностї
Середню квадратичну похибку визначення положення точки зворотною кутовою засічкою у РГР визначають за формулою :

Значення параметрів формули визначають графічно за схемою:
![]() ;
;![]() 22;
22;![]() 20;
20;![]() 31,1;
31,1;![]() 28.3
;
28.3
;![]() 39,1.
39,1.![]()
ПРИКЛАД
2.3. Визначення координат точки зворотною лінійною засічкою
У
зворотній лінійній засічці початковими
даними є координати пунктів 1 і 2;
вимірюваними даними є відстані , (відносна
помилка вимірювання відстаней
![]() ); визначувані дані - координати
); визначувані дані - координати
![]() точки P.
точки P.
Початкові дані:
Координати настінних пунктів розбивочної основи
X1 =193,910; X2 = 216,301; X3 =236,601;
Y1 = 182.151 ; Y2 = 181,772 ; Y3 = 181,450;
Виміряні відстані
S1 = 31.085 + ; S2 = 28.341 + ; S3 = 38.998 + ;

Рисунок - Схема лінійна засічки
Порядок рішення задачі
1. З рішення зворотної геодезичної задачі визначити:
1.1
значення базису засічки - відстань
![]() між
настінними пунктами, до яких вимірювалися
відстані ( 1 і 2
(або
іншими по варіанту)
між
настінними пунктами, до яких вимірювалися
відстані ( 1 і 2
(або
іншими по варіанту)
![]() .
.
1.2
дирекційний кут базису засічки (![]() або
по варіанту):
або
по варіанту):
1.2.1
обчислюють румб базису:
 ;
;
1.2.2
по
знаках приростів координат
![]() і
і
![]() визначають чверть, до якої відноситься
румб, і обчислюють дирекційний кут,
використовуючи залежність між дирекційними
кутами і румбами
визначають чверть, до якої відноситься
румб, і обчислюють дирекційний кут,
використовуючи залежність між дирекційними
кутами і румбами
2. Виконати рішення трикутників 12Р ( або інших по варіанту) по формулах:
2.1 у трикутнику 12P по теоремі косинусів обчислити кути в1 і в2,
![]() ;
;
![]() .
.
2.2
обчислити кут γ
цього ж трикутника
![]() ;
;
2.3 обчислити дирекційні кути сторін 1Р і 2Р:
точка Р праворуч від лінії 1-2
![]() ;
;
![]() .
.
точка Р зліва від лінії 1-2
![]() ;
;
![]()
3.
обчислити дирекційний кут напряму 2-1
![]() :
:
![]() ;
;
4. вирішити прямі геодезичні задачі:
4.1 з пункту 1 на точку P
![]() ,
,
![]() ,
,
4.2 з пункту 2 на точку P
![]()
![]() ;
;
Таблиця - Рішення лінійної засічки
|
№ |
Параметр |
Значення |
№ |
Параметр |
Значення |
|
1 |
|
193,910 |
23 |
|
0,4773420 |
|
2 |
|
216,301 |
24 |
|
610.48805 |
|
3 |
|
|
25 |
|
600.51834 |
|
4 |
|
182,151 |
26 |
|
0,4921450 |
|
5 |
|
181,772 |
27 |
|
0,8705133 |
|
6 |
|
|
28 |
|
+ 15,298 |
|
7 |
|
+ 22,391 |
29 |
|
+ 27,059 |
|
8 |
|
- 0,379 |
30 |
|
209,209 |
|
9 |
(7)2 |
501,35688 |
31 |
|
209,210 |
|
10 |
(8)2 |
0,143641 |
32 |
|
1790.0302 |
|
11 |
|
22,394 |
33 |
|
-163,0595 |
|
12 |
|
501,4912 |
34 |
(33)+(12) |
338,4317 |
|
13 |
|
31,084 |
35 |
|
1269,29 |
|
14 |
|
966,2151 |
36 |
|
0,2666307 |
|
15 |
|
28,340 |
37 |
|
740.5361 |
|
16 |
|
803,1556 |
38 |
|
10404942 |
|
17 |
|
- 0,01692643 |
39 |
|
-0,250281 |
|
18 |
|
Пн-Зх : 00,96972 |
40 |
|
0,9681730 |
|
19 |
|
3590,0302 |
41 |
|
-7,093 |
|
20 |
|
1392,190 |
42 |
|
+27,438 |
|
21 |
|
163,0595 |
43 |
|
209,208 |
|
22 |
(21)+(12) |
664,5507 |
44 |
|
209,210 |
Допустима розбіжність координат і по двох рішеннях 0,010 м;
Розбіжність координат і по двох рішеннях не перевищує 0,005 м;
5. Оцінка точності
5.5 Помилку положення точки P у РГР обчислюють по формулі:
![]()
![]() м
;
м
;![]() м
м
![]() 430.976
430.976
![]() =0,694356
;
=0,694356
;
![]() 0,0123м
0,0123м