

Силовой анализ
Силовой расчёт механизмов заключается в определении тех сил, которые действуют на отдельные звенья механизма при их движении. Вопрос об определении сил имеет большое практическое значение для расчёта на прочность отдельных деталей механизма, для определения трения в кинематических парах и т.д. Зная силы, действующие на различные звенья механизма, мы можем выбрать наиболее рациональные размеры звеньев, определить формы , необходимые для достаточной прочности детали и т.д.
Определение реакций и обобщенного движущего момента, методом векторных планов.
Сущность этого метода сводиться к применению при решении задач динамики уравнения равновесия в форме Даламбера.
Система
уравнений для плоского механизма:


В каждый момент времени, действующие на звено силы уравновешиваются силами инерции звена, а моменты сил, приложенные к звену, уравновешиваются моментами сил инерции звена
Рис. 11
Механизм разбивается на 5 частей и силовой расчёт выполняется для каждого звена в отдельности, начаная с выходного звена.
Расчётная
схема для выходного звена (ползуна 5)
Из
условия равновесия
 ,
, , определим силу реакции со стороны
стойкиR05
и силу реакции со стороны звена 4 на
звено 5 (
, определим силу реакции со стороны
стойкиR05
и силу реакции со стороны звена 4 на
звено 5 ( ,
, )
)


где:


ε5=0,
 , FC1=20000
Н
, FC1=20000
Н



Рис. 13
Начало вектора R05 определяется из уравнения моментов



где: h05 – расстояние от центра тяжести звена 5 до точки приложения силы
Расчётная схема для группы звеньев 3-4

Рис. 14
 (реакции
направлены противоположно)
(реакции
направлены противоположно)
Из
условия равновесия
 относительно т. С, определимRtB
относительно т. С, определимRtB

где:
|
|
LBC= 0,92 м
|








Расчётная схема для группы звена 2

Рис. 15
Из
условия равновесия
 относительно т. А, определимRnB
.
относительно т. А, определимRnB
.

где:
|
|
|








|
Уравнение равновесия для группы звеньев 3-4
Масштаб плана сил µF=25 Н/мм [PF
[ [ [ [
|
Уравнение равновесия для звена 2
Масштаб плана сил µF=10 Н/мм [PF
[ [ [
|

 ]=
]=
 ]=
]=
 ]=
]=
 ]=
]=
 ]=
]=

 ]=
]=
 ]=
]=
 ]=
]=
 ]=
]=

Рис. 16 Планы сил
Из плана сил для группы звеньев 3-4 получаем:

Из плана сил для звена 2 получаем:

Расчётная схема для входного звена

R21=R0
Рис. 17
Движущий момент вычисляется как:

где:
 - плечё реакцииR21
- плечё реакцииR21
|
Положение |
G2 |
G3 |
G5 |
Ф2 |
Ф3 |
Ф5 |
FC |
R45 |
|
Н | ||||||||
|
2 |
206 |
1177 |
13734 |
38,1 |
52,9 |
254,5 |
20000 |
6714,5 |
|
10 |
27,1 |
73,3 |
0 |
1300 |
15327,9 | |||
|
R23t |
R23n |
R12 |
R03 |
М |
|
Н |
Н·м | |||
|
2230,4 |
151,8 |
2052,3 |
3553,5 |
363,1 |
|
6836,1 |
6984 |
9764,1 |
10162 |
1786 |
Определение обобщенного движущего момента методом Жуковского
Метод Жуковского относиться к графическому методу, если имеется план положений механизма и план скоростей, то можно по известным действующим на механизм силам, определить движущий момент и силу, не пренебегая к уравнению кинетостатики.
Теоретическим обоснованием метода Жуковского является баланс мощностей:

Fy – уравновешивающая сила.
Уравнение обозначает: мгновенная мощность уравновешивающей силы в любой момент времени равна сумме мгновенных мощностей всех сил действующих на механизм.
Уравнение баланса в методе Жуковского используется в видо изменённой форме:

Момент уравновешивающей силы относительно полюса повёрнутого на 90° относительно плана скоростей механизма равен сумме моментов всех сил относительно того же полюса.
Жуковским было установлено, что мгновенная мощность силы, действующая на звено пропорциональна моменту этой силы относительно полюса повёрнутого плана скоростей.



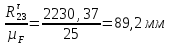
Рис. 18
План скоростей повёрнутый на 90°
Рис. 19
|
|
Приведённые моменты:
|







 мм
мм


Сила
необходимая для нахождения движущего
момента находится из условия равновесия,





Движущий момент, приложенный к кривошипу 1, равен:

Таблица 6
|
Положение |
Fy , Н |
My , Н·м |
|
1 |
2020,5 |
363,7 |
|
10 |
9948 |
1790 |
Вывод
Значения движущего момента, полученные в методе векторных планов и в методе Жуковского, отличаются на величину меньшую, чем 1% . Это связанно с тем, что построение графической части производилось в Компасе и значения ускорении взяты из аналитической части. Полученный большой движущий момент в положении 10 показывает, что на хостом ходу механизму необходимо значительный движущий момент. Это необходимо учитывать при выборе или проектировании привода.