

Описание работы механизма по кинематической схеме
Геометрические
параметры звеньев: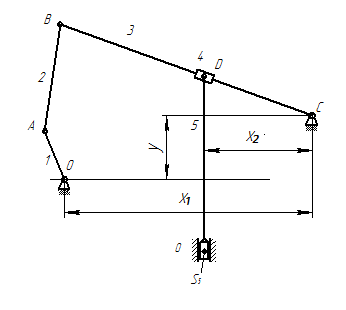
lOA=0.18м, lAB=0.37м, lBC=0.92м, x1=0.85м, x2=0.37м, y=0.22м Рис.1 Механизм стана холодной калибровки труб
В состав исполнительного механизма Стана холодной калибровки труб входят шесть звеньев: стойка 0, кривошип 1, шатун 2, кулиса 3, кулисный камень 4, ползун 5. Входным звеном является кривошип 1, выходным ползун 5. Механическая энергия от привода станка сообщается кривошипу 1, который вращается относительно стойки 0. Движение от кривошипа 1 через шатун 2 передается кулисе 3, которая движется возвратно-качательно относительно неподвижной оси С. Движение кулисы 3 через кулисный камень 4 сообщает ползуну 5, который движется возвратно-поступательно: сверху вниз – рабочий ход, в обратную сторону - холостой ход. Кулисный камень 4 совершает сложное движение: переносное вращательное - вместе с кулисой 3 и относительное поступательное - вдоль кулисы 3.
Структурный анализ механизма
Данный механизм состоит из шести звеньев: стойка 0, кривошип 1, шатун 2, кулиса 3, кулисный камень 4, ползун 5. Звенья механизма образуют семь кинематических пар: 0 – 1, 1 – 2, 2 – 3, 3 – 0, 4 – 5 – вращательные, одноподвижные, пятого класса; 3 – 4 – поступательные, одноподвижные, пятого класса; 5 – 0 – цилиндрическая, двухподвижная, четвертого класса. Все кинематические пары низшие, механизм – рычажный. Механизм также является плоским (звенья механизма движутся в плоскостях, параллельных неподвижной плоскости), содержит два замкнутых кинематических контура (0-1-2-3-0, 0-3-4-5-0). Число степеней свободы механизма определим, применяя универсальную формулу Чебышева
 ,
,
где
n
– число звеньев, pН
– число низших кинематических пар. В
рассматриваемом механизме n
= 6,
pН
= 7,
поэтому
 - механизм обладает одной степенью
свободы.
- механизм обладает одной степенью
свободы.
Выявим избыточные связи: кинематическая пара стойка-ползун, как видно на структурной схеме, имеет ветвление: число избыточных связей типа Б определим по формуле
 ,
,
где
i
- индекс ветвления пары, Si
–
число независимых связей в i
– той ветви, S
– класс кинематической пары. Так как в
данном случае
 ,
, (оба ветвления цилиндрические) и
(оба ветвления цилиндрические) и (класс цилиндрической пары – четвертый),
то
(класс цилиндрической пары – четвертый),
то
Число избыточных связей, образованных при замыкании контуров (тип В), определим из формулы Малышева
 ,
,
где
WЧ
– число степеней свободы, найденное по
формуле Чебышева, WСМ
– число степеней свободы, найденное по
формуле Сомова – Малышева:
 ,
,
где i – класс кинематических пар, pi – число кинематических пар класса i.
В данном случае
 и
и
 .
.
Таким образом, в механизме имеется четыре избыточные связи типа Б и пять избыточных связей типа В.
В соответствии с принципом Ассура, выделим начальный механизм, обладающий числом степеней свободы всего исследуемого механизма. Этот механизм – кривошипный, состоит из стойки 0 и кривошипа 1. Остальные звенья образуют ведомую цепь, имеющую нулевую подвижность относительно звеньев начального механизма. Ведомая цепь состоит из двух структурных групп первого класса второго порядка: ВВВ и ПВП (2 – 3 и 4 – 5)
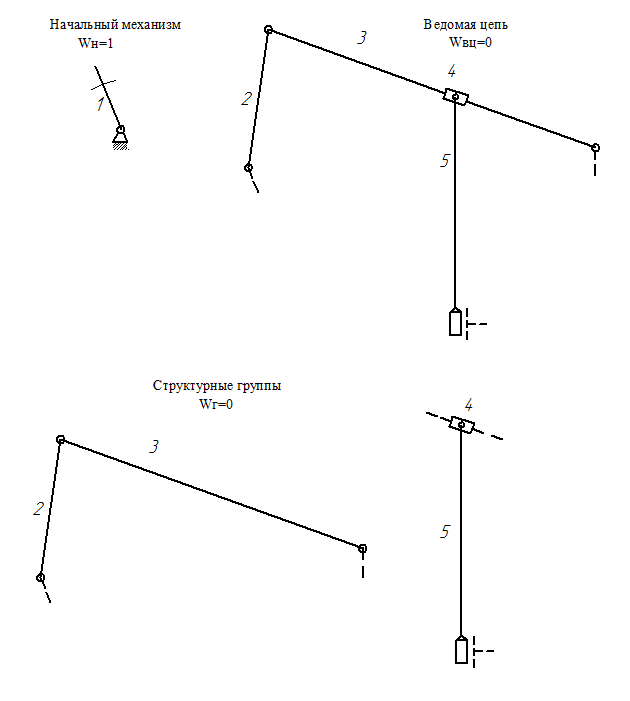
Рис. 2 Структура механизма