

3.2 Расчет механических характеристик асинхронного двигателя с
короткозамкнутым ротором при управлении от преобразователя
частоты с инвертором тока.
При частотном управлении в соответствии с общепринятыми допущениями, которые обуславливают постоянство сопротивлений схемы замещения при данной частоте, принята Т – образная схема замещения, приведенная на рисунке 3.4.
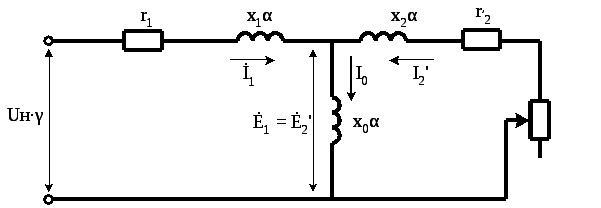
Р исунок 3.4 - т-образная схема замещения асинхронного двигателя, где
r1 - активное сопротивление обмотки фазы статора, r′2 - приведенное активное
сопротивление фазы ротора, x1 – индуктивное сопротивление обмотки фазы статора,
Uн - номинальное фазное напряжение, I1 - фазный ток статора, I′2-приведенный
фазный ток ротора, E1 - ЭДС статора, E′2 - приведенная ЭДС ротора, I0 – ток
холостого хода, x0 - индуктивное сопротивление намагничивающей цепи, x2 -
 индуктивное
сопротивление фазы ротора, α
- относительная частота тока статора,
индуктивное
сопротивление фазы ротора, α
- относительная частота тока статора,
β - параметр абсолютного скольжения или относительная частота тока ротора,
γ
- относительное напряжение.![]()
![]()
Параметры схемы замещения по данным [7].
- приведенное активное сопротивление цепи статора…………….R1 = 0,023;
- приведенное активное сопротивление цепи ротора……………..R’2 = 0,019;
- приведенное индуктивное сопротивление цепи статора………..X1 = 0,10;
- приведенное индуктивное сопротивление цепи ротора…………X’2 = 0,12;
Значения параметров схемы замещения приведены в относительных единицах. Для перевода их в именованные применяются формулы (ст63 [7]).
![]() ,
,
![]() ,
,
где: X, R – сопротивления в относительных единицах;
Х, R, - сопротивления в Ом;
I1НОМ.Ф – номинальный фазный ток статора;
I1НОМ.Ф = P2НОМ/3×U1Ф×η×cosφ = 110/3×220×0,93×0,85 = 211 А,
U1Ф – номинальное фазное напряжение.
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом,
Ом,
![]() Ом.
Ом.
Номинальная угловая скорость двигателя.
ωО = 2Пf/4 = 2×3,14×50/64 = 78,5 рад/с.
ωНОМ = 2Пn/60 = 2×3,14×738/60 = 77,2 рад/с.
Номинальный момент двигателя.
Мном = Рном/ ωНОМ = 110×103/77,2 = 1424,87 Н×м
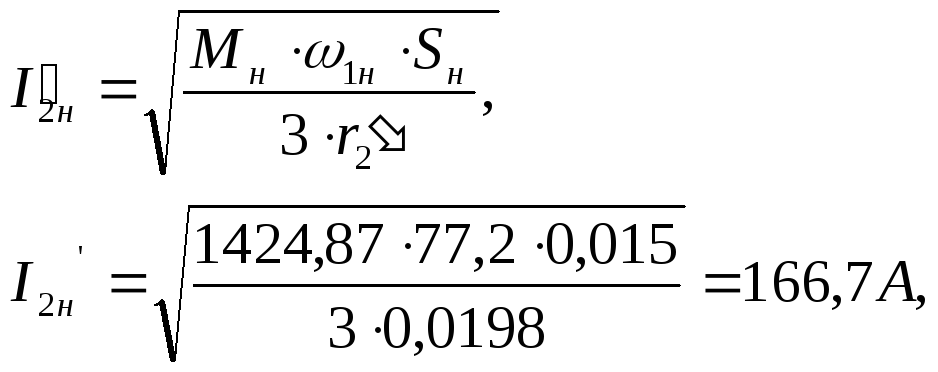
 Номинальный
приведенный ток ротора.
Номинальный
приведенный ток ротора.
Рассчитываем намагничивающий ток.

где:

Индуктивное сопротивление намагничивающей цепи.
x0 = xμ+x1 = 2,5023 + 0,1043 = 2,6073.
Номинальное значение параметра абсолютного скольжения.

Так как параметр абсолютного скольжения при номинальном режиме работы, не может быть больше единицы, то принимаем βн=0,015, что соответствует номинальному скольжению двигателя (Sн = 0,015).
Расчет статических характеристик асинхронного двигателя в системе частотного управления при Ф=const производим используя следующие формулы:
![]()
Расчет механических характеристик проводится в относительных единицах при α=1 и сводится в таблицу 3.1 где угловая частота вращения вала двигателя определяется для различных частот тока по формуле ω* = α – β.
Таблица 3.1 - Расчет механических характеристик асинхронного двигателя при
частотном управлении.
|
β |
B(β) |
ω,с-1 |
ω* |
M*(β) |
ω*α=1 |
ω*α=0,8 |
ω*α=0,6 |
ω*α=0,4 |
ω*α=0,2 |
|
0 |
0,000392 |
78,5 |
1,016 |
0 |
1 |
0,8 |
0,6 |
0,4 |
0,2 |
|
0,001 |
0.0004076 |
78,421 |
1,015 |
0,156 |
0,999 |
0,799 |
0,599 |
0,399 |
0,199 |
|
0,005 |
0.0004702 |
78,108 |
1,011 |
0,522 |
0,995 |
0,795 |
0,595 |
0,395 |
0,195 |
|
0,015 |
0.0006267 |
77,2 |
1 |
1 |
0,985 |
0,785 |
0,585 |
0,385 |
0,185 |
|
0,03 |
0.0008615 |
76,145 |
0,986 |
1,864 |
0,97 |
0,77 |
0,57 |
0,37 |
0,17 |
|
0,05 |
0.0011745 |
74,575 |
0,966 |
2,882 |
0,95 |
0,75 |
0,55 |
0,35 |
0,15 |
|
0,07 |
0.0014875 |
73,005 |
0,946 |
3,151 |
0,93 |
0,73 |
0,53 |
0,33 |
0,13 |
|
0,1 |
0.0019570 |
70,65 |
0,915 |
3,035 |
0,9 |
0,7 |
0,5 |
0,3 |
0,1 |
|
0,2 |
0.0035220 |
62,8 |
0,813 |
2,671 |
0,8 |
0,6 |
0,4 |
0,2 |
0 |
|
0,3 |
0.0050870 |
54,95 |
0,711 |
2,404 |
0,7 |
0,5 |
0,3 |
0,1 |
|
|
0,4 |
0.0066520 |
47,1 |
0,610 |
2,251 |
0,6 |
0,4 |
0,2 |
0 |
|
|
0,5 |
0.0082170 |
39,25 |
0,508 |
2,111 |
0,5 |
0,3 |
0,1 |
|
|
|
0,6 |
0.0097820 |
31,4 |
0,406 |
1,985 |
0,4 |
0,2 |
0 |
|
|
|
0,7 |
0.0113470 |
23,55 |
0,305 |
1,823 |
0,3 |
0,1 |
|
|
|
|
0,8 |
0.0129120 |
15,7 |
0,203 |
1,751 |
0,2 |
0 |
|
|
|
|
0,9 |
0.0144770 |
7,85 |
0,101 |
1,609 |
0,1 |
|
|
|
|
|
1 |
0.0160420 |
0 |
0 |
1,549 |
0 |
|
|
|
|
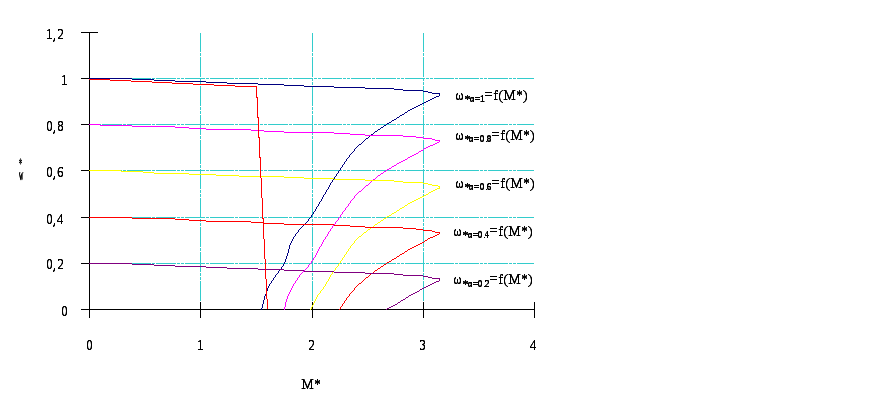
Рисунок 3.5 - Механические характеристики асинхронного двигателя с короткозамкнутым ротором при частотном управлении и механизма поворота экскаватора
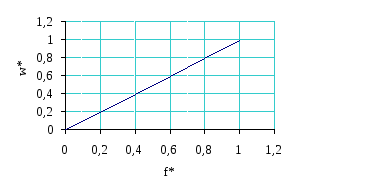
Рисунок 3.6 – Зависимость w* = f(f*) при частотном управлении
Применение частотно-регулируемого асинхронного электропривода обеспечивает:
- Плавность регулирования и высокую жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
 -
Экономичность регулирования, определяемую
тем, что двигатель работает с малыми
величинами абсолютного скольжения,
и потери в двигателе не превышают
номинальных.
-
Экономичность регулирования, определяемую
тем, что двигатель работает с малыми
величинами абсолютного скольжения,
и потери в двигателе не превышают
номинальных.