

III. Вспомогательная подсистема.
Информационные и управленческие подсистемы обслуживают в основном оперативный технологический персонал, но АСУТП выполняет еще функции, обеспечивающие ее нормальную эксплуатацию. Эти функции объединены во вспомогательную подсистему. К функциям этой подсистемы относят:
1) организацию всего комплекса технических средств, как единого целого;
2) диагностика состояния комплекса технических средств (КТС);
3) контроль функцией всей системы;
4) организация совместной работы с другими АСУ.
Основной задачей этой подсистемы является проведение тестирования всех элементов системы и обнаружения неисправностей.
Режимы работы асутп
В зависимости от степени участия человека в выполнении функции АСУТП различают два режима работы:
1). Автоматизированный; в автоматизированном режиме оперативный персонал принимает активное участие в управлении. Возможны следующие варианты реализации этого режима:
- ручное управление;
- режим «ЭВМ-Советчик»;
2). Автоматический.
3). Диалоговый режим; в этом случае оператор ставит вопросы и получает от ЭВМ ответы.
При ручном управлении оперативный персонал использует полученную информацию о состоянии объекта управления и принимает решение об указании управляющих воздействий на объект вручную. При этом часть локальных автоматических систем регулирования может работать самостоятельно.
В режиме «ЭВМ-Советчик» на основе полученной информации ЭВМ производит обработку и поиск оптимального технологического режима и выдает рекомендации оперативному персоналу о целесообразности изменения режима. В случае, принятия совета оператор может произвести управляющее воздействие вручную или изменить задания некоторым регуляторам. Недостаток этого режима состоит в трудности определения правильности выработанной ЭВМ рекомендации. В диалоговом режиме оператор имеет возможность получать информацию по запросу о настоящем, прошлом и будущем технологического процесса, и лишь после анализа этой информации примем решение о целесообразности изменения технологического режима.
В автоматизированном режиме работы АСУТП могут быть реализованы следующие варианты управления:
1. Супервизорное (косвенное) управление;
2. Непосредственное цифровое управление (прямое).
Супервизорный режим работы асутп. Структурная схема асутп в супервизорном режиме работы.
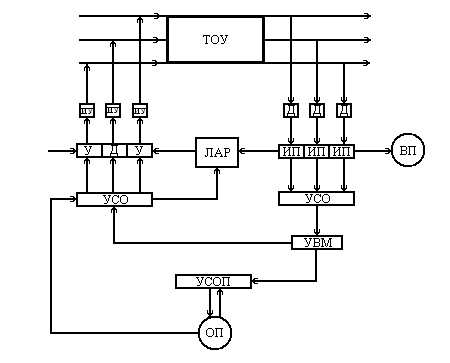
ТОУ – технологический объект управления;
Д – датчики или первичные преобразователи;
ИП – измерительные преобразователи;
ЛАР – локальные автоматические регуляторы (по одному на каждый контур регулирования);
УДУ – устройство дистанционного управления;
УСО – устройство связи с объектом управления;
УСОП – устройство связи с оперативным персоналом;
УВМ – управляющая вычислительная машина;
ОП – оперативный персонал;
ИУ – исполнительные устройства (исполнительный механизм с регулирующим органом).
При супервизорном режиме работы АСУТП отдельно работают все контуры автоматического регулирования. В развитии системы управления дополнительно устанавливается УВМ, которая через АЦП и ДЦП воспринимает текущую информацию в состоянии объекта управления. Полученная информация обрабатывается в УВМ и отражается на дисплее, а так же печатается на принтере.
УВМ определяет оптимизированный технологический режим и может изменить задание локальным регулятором, а так же их настройки. При необъективности ОП может переводить любой контур автоматического регулирования на ручное управление, обычно с использованием УДУ.
При выходе из строя УВМ локальные автоматические системы регулирования продолжают работать автономно.
Достоинства:
Логическая последовательность внедрения АСУТП, то есть в начале внедряются локальные АСР отдельно на каждый регулируемый параметр, а затем системы регулирования усложняются за счет подключения УВМ;
При выходе из строя УВМ локальные АСР продолжают управлять процессом.
Недостатки:
Громоздкость АСУ;
Высокая стоимость за счет установки локальных автоматических регуляторов и вторичных приборов на каждый контур регулирования.