

5. Застосування АЗРН для рішення навігаційних і бойових задач
Автоматичні радіокомпаси
Політ на радіостанцію або від радіостанції
Політ здійснюється по радіокомпасу шляхом дотримування доворотами літака ККР = 0о або ККР = 180о. Боковий вітер зносить літак із заданого маршруту.
Політ на радіостанцію з ККР = 0о здійснюється по спіралі (радіодромії), яка сходиться в точку, де знаходиться радіостанція. Тому лінійне відхилення від заданого маршруту спочатку зростає, а наприкінці зменшується до нуля, тобто мета польоту буде досягнута, але довжина траси більше довжини ортодромії.
ККР = 0о
Радіодромія
07/07/19 |
21 |

Політ від радіостанції з ККР = 180о здійснюється по кривій, яка асимптотично наближається до прямої, яка співпадає з напрямком вітру.
Лінійне відхилення від заданого маршруту безперервно зростає.
Вітер
ККР = 180о
|
|
|
|
|
|
|
|
|
|
ут |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
ш |
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
й |
м |
|
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В обох випадках заданий маршрут дотримується тільки шляхом врахування зносу літака вітром, тобто при польоті з ККР = 0о + αЗн або ККР = 180о + αЗн
відповідно:
Заданий маршрут |
V |
U |
ККР = 0о + αЗн |
|
W |
|
|
ККР = 180о + αЗн |
V |
U |
Заданий маршрут |
|
W |
|
|
07/07/19 |
22 |

Радіовисотоміри
І. Визначення істинної висоти польоту
НБар 3=const
НБар 2=const
НБар 1=const
НРВ=НІст  НРВ=НІст
НРВ=НІст
ІІ. Попередження про зниження на небезпечну висоту
НІст>ННБ |
НІст<ННБ |
ННБ |
|
07/07/19 |
23 |
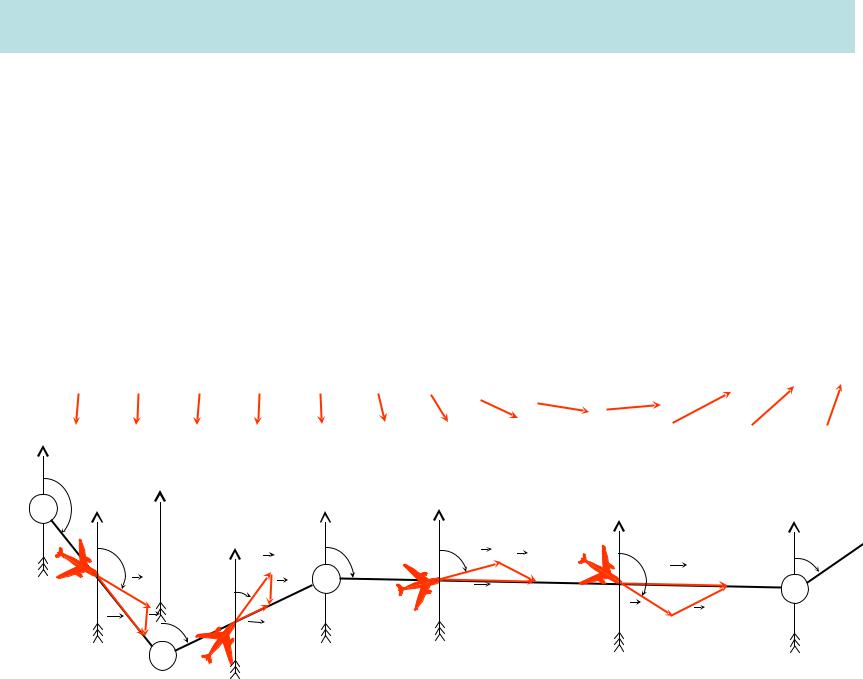
Доплерівські вимірювачі швидкості і кута зносу
І.Політ по маршруту:
-дотримання прокладеного маршруту: для цього політ по заданому маршруту здійснюється з магнітним курсом МК = ψЗад – αЗн, кут зносу
контролюється за допомогою ДВШКЗ;
- дотримання часового графіку: для цього політ по заданому маршруту на відрізку Li здійснюється із розрахунковою шляховою швидкістю Wi = Li / (ti+1 – ti), яка контролюється за допомогою ДВШКЗ.
Розподіл швидкості вітру вздовж маршруту
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ1 |
|
N |
|
|
N |
|
|
|
|
|
t1 |
1 |
N |
|
|
|
N |
N |
|
|
N |
|
|
|
МК |
|
N |
ψ3 |
МК |
|
|
ψ4 |
||||
|
|
|
|
МК |
|
|
|
|||||
|
|
|
|
|
МКV |
V U |
W |
|
|
|||
|
S |
|
V |
|
3 |
|
|
t |
4 |
|
||
|
|
|
|
U ψ2 |
U |
t3 |
W |
V |
U |
|
||
|
|
|
W |
|
|
|
|
4 |
|
|||
|
|
|
S |
W |
|
|
|
|
|
|
||
|
|
S |
S |
S |
|
|
|
|
|
|||
|
|
t2 |
2 |
|
S |
|
|
S |
24 |
|||
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ІІ. Визначення місцеположення
Поточне місцеположення літака визначається його поточними координатами [x(t); z(t)], які знаходяться методом счислення пройденого шляху по відомим початковим координатам [x0; z0] і проекціям Wx(t) та
Wz(t) вектору шляхової швидкості: x(t)=x0+∫Wx(t)·dt, z(t)=z0+∫Wz(t)·dt.
Осі OX та OZ системи координат орієнтовані на схід і північ.
Істинний курс літака (ІК) контролюється бортовою курсовою системою. Істинний шляховий кут (ІШК) відрізняється на кут зносу:
ІШК=ІК+αЗн, тому проекції шляхової швидкості:
|
Wx(t)= W(t)·sin(ІШК), |
|
z |
Wz(t)= W(t)·cos(ІШК). |
N ІК ІШК |
|
||
z0 |
|
|
|
V |
|
|
|
αЗн U |
z(t) |
W |
W |
|
|
|
0 x0 |
x(t) x |
S |
|
|
25 |

ІІІ. Робота у складі пілотажно-навігаційних систем
|
|
|
|
Від еталона часу t |
|
|
||||
|
|
|
курс |
|
|
|
|
курс |
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
Датчик курсу і |
|
|
||||||||
|
|
|
|
|
|
|
|
тангаж |
||
вертикаль |
|
|
|
|||||||
вертикалі |
|
|
|
крен |
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
БЦОМ |
|
складові |
|
|
|
|
|
|
|
|
||||
|
|
R0 |
|
|||||||
|
|
|
горизонтальної |
|||||||
|
|
|
||||||||
|
|
швидкість |
|
|
|
швидкості |
||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
широта |
|
ДВШКЗ |
|
знос |
|
|
||||||
|
|
|
|
|||||||
|
|
|
|
довгота |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
висота |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
При роботі у складі автономної інерційної навігаційної системи ДВШКЗ безперервно видає поточну інформацію про вектор шляхової швидкості.
Алгоритмом обробки інформації в навігаційному обчислювачі передбачено періодичне коригування (вектор R0 ) параметрів місцеположення і руху літака по інформації від інших систем – РСДН, РСБН, СРНС, бортової панорамної РЛС, тощо.
07/07/19 |
26 |

Панорамні РЛС
І. Орієнтація на місцевості для бомбардування, скидання вантажів або десантування
Y |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
U |
|
Лі |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ні |
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
H |
|
|
|
|
|
шл |
ях |
|
|
||
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
W |
αЗн |
ε |
|
|
|
|
|
|
|
|
X |
|
|
П |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ |
р |
ое |
|
|
|
|
|
||
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
ці |
|
|
|
|
|
Z |
|
|
DГ |
|
|
я |
л |
|
|
|
|
|
|
|
|
|
|
|
і |
|
|
||
|
|
|
|
|
|
|
|
|
ні |
|
|
|
|
|
|
|
|
|
|
|
|
їш |
|
|
|
|
|
|
|
|
|
|
|
|
лях |
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
X |
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
х |
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
|
|
л |
|
ЛП |
|
|
|
|
|
|
|
|
|
ш |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
я |
|
|
|
|
|
|
|
|
|
|
|
і |
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
і |
|
|
|
|
|
|
|
|
|
|
|
Л |
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
DГ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
αЗн |
ε |
γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
Z |
З геометричних співвідношень координати об'єкту:
|
|
|
|
|
та Зн |
|
|
||||
|
DГ |
D2 H 2 |
|
|
|||||||
і швидкість їх зміни: |
d |
|
d |
|
L |
|
|||||
|
dDГ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
dt |
|
W cos |
dt |
|
dt |
arcsin |
|
|
||
|
|
|
|
|
|
|
DГ |
||||
Після накладання вручну перехрестя на відмітку об'єкту по ПОЛОЖЕННЮ органів управління визначаються координати об'єкту відносно літака. Щоб знайти кут зносу, шляхову швидкість і відстань об'єкту від лінії шляху, треба утримувати об'єкт у перехресті шляхом СИНХРОНІЗАЦІЇ переміщення перехрестя з переміщенням літака відносно об'єкту. Синхронізація здійснюється шляхом підбору швидкості зміни горизонтальної
дальності DГ і лінії пеленгу (ЛП). |
27 |

N
 ІК ІШК
ІК ІШК
αЗнV


 U
U


 ψ1 W
ψ1 W
 ψ2 S
ψ2 S
ІІ. Визначення кута зносу, шляхової швидкості і місцеположення літака.
Кут зносу і шляхова швидкість знаходяться по відмітці будь-якого нерухомомого об'єкту після накладання на нього перехрестя і синхронізації шляхом рішення системи рівнянь відповідним обчислювачем.
Одночасно знаходяться координати DГ і ε цього об'єкту в системі координат носія РЛС.
По координатам двох орієнтирів (ψ1 та ψ2) і курсу (ІК) знаходиться місцеположення літака, яке можна використати для корекції бортової навігаційної системи.
Кут зносу можна визначити вручну, спостерігаючи переміщення відміток наземних об'єктів на індикаторі. Лінія пеленгу відхиляється в напрямку зносу літака так, щоб наземні об'єкти переміщувались паралельно або по лінії пеленгу. Тоді кут її відхилення дорівнює куту зносу.
07/07/19 |
28 |

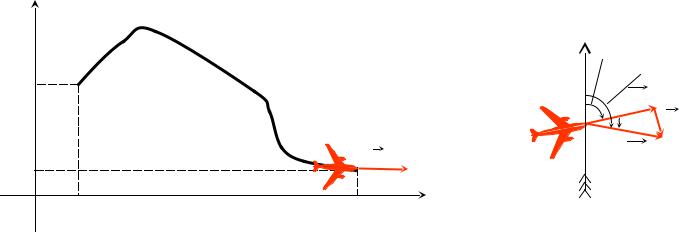
ІІІ. Визначення істинної висоти польоту
Щоб уникнути спотворення зображення, розгортка дальності починається з затримкою на висоту DГ  D2 H 2 . Якщо затримка відсутня або менша, ніж τН=2Н/с, то початок розгортки дальності (поблизу вершини сектору) буде затемненим, а зображення місцевості на початку розгортки буде стиснутим.
D2 H 2 . Якщо затримка відсутня або менша, ніж τН=2Н/с, то початок розгортки дальності (поблизу вершини сектору) буде затемненим, а зображення місцевості на початку розгортки буде стиснутим.
Затримку τЗ початку розгортки дальності регулюють так, щоб вона починалась з вершини сектору. Тоді істинна висота польоту Н=0.5сτЗ.
W |
DГ |
|
φ |
|
|
Н |
D |
|
DГ |
|
|
|
Н |
D |
07/07/19 |
29 |
ІV. Орієнтація по радіомаякам
Крім основного режиму активної радіолокації панорамні РЛС можуть працювати в режимі з активною відповіддю у якості запитувача.
Відповідачем являється радіомаяк наземного або морського базування з відомими координатами.
Режим “МАЯК” застосовується для орієнтації на місцевості з малим радіолокаційним контрастом та при роботі в умовах інтенсивних пасивних перешкод.
Режим “МАЯК” може також застосовуватись для виходу на літак з відповідачем (збір в групу, дозаправка в повітрі).
07/07/19 |
30 |