

НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ Житомирський військовий інститут ім. С.П.Корольова
Кафедра бойових авіаційних комплексів та радіотехнічного забезпечення
Розділ IV
“Експлуатація і ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет”
Тема 20-2. “Автономні засоби радіонавігації“
Доцент кафедри кандидат технічних наук, доцент Войчук В. А.
Київ 2013
07/07/19 |
1 |

Навчальна та виховна мета
1.Засвоїти принципи побудови та основи бойового застосування і технічної експлуатації автономних засобів радіонавігації.
2.Виховувати у студентів – майбутніх фахівців авіації Повітряних Сил ЗСУ самостійність, творчу ініціативу, наполегливість та високу відповідальність за якісну організацію технічної експлуатації та вміле бойове застосування автономних засобів радіонавігації.
Навчальні питання
1.Доплерівські вимірювачі швидкості і кута зносу.
2.Застосування автономних засобів радіонавігації для рішення навігаційних задач.
3.Застосування автономних засобів радіонавігації для рішення бойових задач.
07/07/19 |
2 |

Контрольні завдання (АЗРН2)
1.Проаналізуйте вплив крену літака на результати вимірювання шляхової швидкості і кута зносу однопроменевим ДВШКЗ (1 бал).
2.Проаналізуйте вплив тангажу літака на результати вимірювання шляхової швидкості і кута зносу однопроменевим ДВШКЗ (1 бал).
3.Порівняйте результати вимірювання шляхової швидкості однопроменевим ДВШКЗ при зниженні і наборі висоти з однаковою повітряною швидкістю при Θ=αЗн (1 бал).
4.Проаналізуйте можливість вимірювання швидкості зниження однопроменевим ДВШКЗ при Θ=αЗн±90о (1 бал).
5.Проаналізуйте можливість застосування двохпроменевого одностороннього ДВШКЗ при орієнтації ДСА назад (1 бал).
6.Поясніть, чому в багатопроменевих ДВШКЗ нестабільність частоти мало впливає на результати вимірювання (1 бал).
7.Обгрунтуйте оптимальне положення “плям” на підстилаючій поверхні (1 бал).
8.Проаналізуйте можливі наслідки застосування в імпульсному ДВШКЗ нестабілізованої антени (1 бал).
Примітка: Мінімальна сума балів по темі для отримання позитивної оцінки - Σ=(АЗРН1+АЗРН2+АЗРН3)=7,8.
Максимальна сума зарахованих балів по темі – Σ=(АЗРН1+АЗРН2+АЗРН3)=13.
07/07/19 |
3 |

4. Доплерівські вимірювачі швидкості і кута зносу
Призначення, склад і характеристики
ДВШКЗ являється автономним засобом визначення повного вектору швидкості руху відносно підстилаючої поверхні (горизонтальної складової
– вектору шляхової швидкості і вертикальної швидкості).
ДВШКЗ застосовується автономно або у складі автономної інерційної навігаційної системи, яка визначає поточне положення літака і параметри його руху методом счислення пройденого шляху.
Від еталона часу
t
Датчик |
|
курс |
|
|
|||
вертик. |
|
||||||
курсу і |
|
||||||
вертикалі |
|
|
|
|
БЦОМ |
||
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
R0 |
|||
|
|
|
швидк. |
|
|||
|
|
|
|
||||
|
|
|
|
|
|
||
ДВШКЗ |
|
знос |
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
07/07/19
 курс
курс
 тангаж
тангаж
 крен
крен
 горизонт.
горизонт.  швидкість
швидкість
 широта
широта
 довгота
довгота
 висота
висота
Переваги інерційної системи:
-безперервність навігаційних визначень;
-автономність;
-достатньо висока точність;
-не потрібна передпольотна юстировка.
Недоліки інерційної системи:
-залежність від датчика курсу;
-треба знати місцеву вертикаль;
- накопичування помилок. |
4 |
|
Принципи побудови і роботи ДВШКЗ
V
W |
αУп |
|
ψ |
||
|
||
|
φ |
D=const |
FД=const |
|
|
|
|
n |
s |
t |
|
|
|
o |
|
||
|
|
c |
|
|
||
|
= |
|
|
|
||
D |
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
αЗн W |
|
|
|
|
|
|
|
|
|
|
|
|
|
ψ |
|
FД (ψ-αЗн)
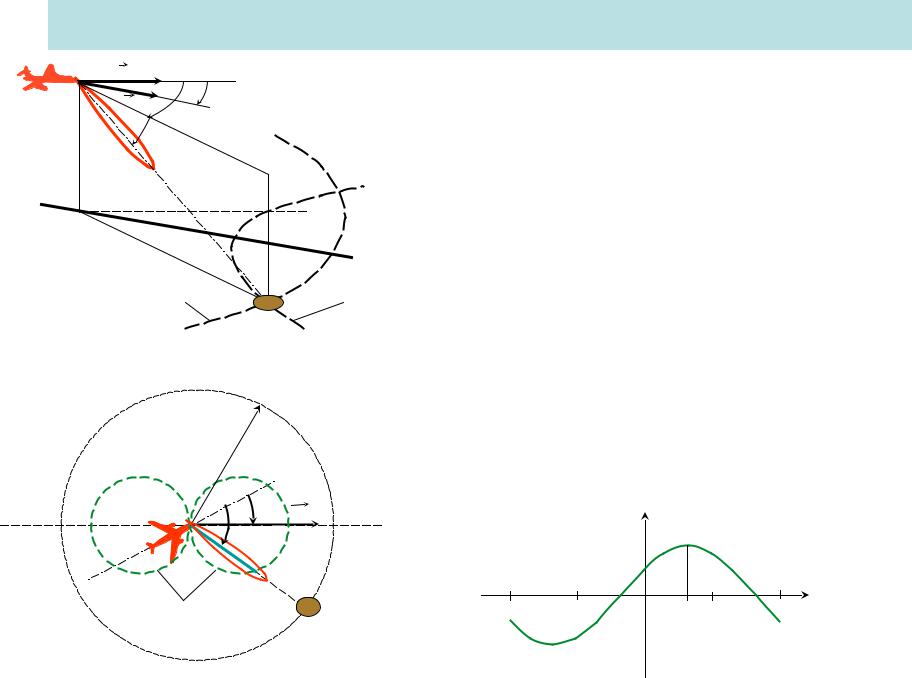
Швидкість зближення з ділянкою
підстилаючої поверхні в напрямку (ψ, φ)
VЗбл W cos cos( Зн )
викликає доплерівський зсув частоти
FД |
2VЗбл |
2W cos cos Зн |
|||
|
|
|
|
|
|
Тому шляхова швидкість літака |
|||||
W |
FД |
FД max |
|||
|
|
|
|
||
2cos cos( Зн ) |
2cos |
||||
FД(ψ)→max при ψ→αЗн
FД(ψ)
- π |
- π/2 |
αЗн π/2 |
π ψ |
07/07/19 |
5 |

-F Д3
- FД4
FД0< FД01<FД2<FД3<FД4
- |
- |
|
|
|
|
Д0= |
1 |
|
|
||
F |
|
|
|||
|
F |
|
Д |
|
|
Д |
|
|
|
2 |
|
|
Д0 |
F |
F |
||
2 |
|
Д |
|||
|
F |
|
|
||
|
1 |
|
|
|
|








 αЗн
αЗн










 ψ
ψ



 1
1 

 2
2 



Z
F 3 Д
F 4 Д
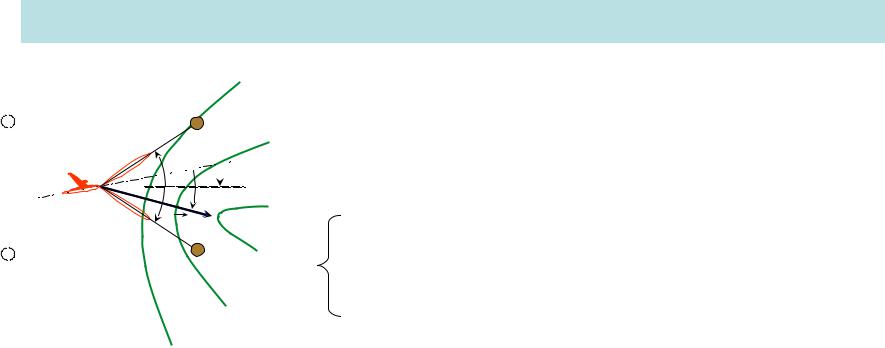
Лінії рівних доплерівських зсувів частоти (ізодопи) на
плоскій підстилаючій поверхні являються гіперболами з асимптотами у вигляді прямих, які виходять з точки розміщення ДВШКЗ.
Через те, що “пляма” на
Xпідстилаючій поверхні має
кінцеві розміри, які залежать від ширини ДСА і дальності, кожна спектральна лінія
зондуючого сигналу створює ділянки суцільного спектру відбитого сигналу кінцевої ширини.
Ширина спектру залежить також від орієнтації“ плями” відносно ізодопи.
Випадковий характер спектру відбитого сигналу і його кінцева ширина викликають додаткові помилки визначення доплерівського зсуву частоти.
07/07/19 |
6 |

V




 W
W 
 αЗн
αЗн





 φ
φ
γ1











 γ2
γ2

 FД=const
FД=const
S(FД)
S(FД) |
FД |
|
|
FД сер |
FД |
γ |
γ1 |
γ2 |
07/07/19
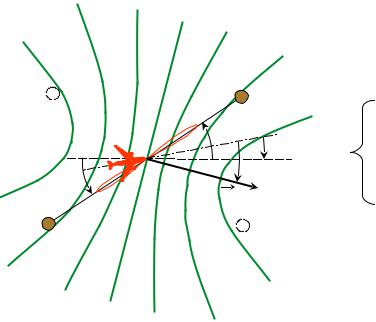
В межах “плями” на підстилаючій поверхні окремі елементи поверхні
опромінюються під різними кутами γ, що спричиняє “розмив” спектральної лінії
зондуючого сигналу.
Інтенсивність відбитого сигналу залежить також від кута падіння γ: вона зростає із збільшенням кута падіння. Особливо помітна цязалежність над водною поверхнею.
Через неоднакову залежність інтенсивності відбитого сигналу від кута
падіння для земної і водної поверхні виникає “морський ефект”: спектр
відбитого сигналу стає несиметричним і середнє значення доплерівського зсуву FД
сер зміщується в напрямку менших частот (більших кутів падіння γ).
7

Однопроменевий ДВШКЗ
V |
αУп |
|
W |
||
ψ |
||
|
||
|
φ |
D=const 

 FД=const
FД=const
FД(ψ) 
- π - π/2 |
αЗнπ/2 π ψ |
FД(ψ)→max при α→αЗн
αЗн
ψ
W


 WВ W
WВ W
 φ
φ
В горизонтальному польоті
FД 2W cos cos Зн
Поворотом антени знаходиться положення, коли
FД=FД max. Тоді
W FД max
2cos
і αЗн=ψ, але пеленгація методом максимуму менш
точна, ніж методом мінімуму. Тому знаходиться положення ψ, коли FД=0. Тоді αЗн=ψ±90о.
Недоліки:
- неможливо одночасно точно визначати FД і αЗн;
- точність визначення FД залежить від стабільності частоти передавача;
- неможливо врахувати вертикальну швидкість: |
||
FД |
2W cos cos Зн |
2WB sin |
|
|
|
Положення променя у вертикальній площині вибирають в межах φ=45 … 70о. При цьому достатня енергія відбитих сигналів і припустимі
помилки вимірювань. |
8 |
Двохпроменевий ДВШКЗ
FД max 2W cos
4 |
1 |
ψ 

 θ
θ 






 ψ αЗн
ψ αЗн
W
3 |
2 |
В двохпроменевих ДВШКЗ можна одночасно визначати W і αЗн.
Односторонній ДВШКЗ
Обидва променя орієнтовані вперед (1 і 2) або назад (3 і 4):
|
|
FД1 |
|
2W cos Зн cos |
2WB sin |
|
|
||||
|
|
|
|
|
|
|
|
FД2 |
|
2W cos Зн cos |
2WB sin |
|
|
|
|
|
|
|
При нерухомій антені звичайно θ=0. Рішенням |
||||
системи цих рівнянь знаходяться W і |
αЗн. |
||||
Сума і різниця частот сигналів двох каналів при горизонтальному польоті (WB=0):
ΣF12=FД1+FД2=2FД max·cosψ·cos(αЗн-θ); ΔF12=FД1-FД2=2FД max·sinψ·sin (αЗн-θ)
Рухома антена вручну або слідкуючою системою встановлюється в |
|||||||||
положення, коли ΔF =F |
Д1 |
-F |
Д2 |
=0. |
Тоді α |
Зн |
=θ і |
||
12 |
|
|
|
|
|
|
|||
|
|
W |
|
|
|
|
|
F12 |
|
|
|
4 cos cos |
|||||||
|
|
|
|
|
|
||||
Збільшення кута ψ підвищує точність визначення кута зносу, але зменшує точність визначення шляхової швидкості.
Неможливо в сумарному сигналі компенсувати вертикальну 9 складову швидкості.
4 |
1 |
ψ |
θ |
ψ |
αЗн |
|
|
|
W |
3 |
2 |
Двохсторонній ДВШКЗ
Обидва променя орієнтовані діагонально (1 і 3) або назад (2 і 4):
FД1 |
2W cos Зн cos |
2WВ sin |
|
|
|
|
|
FД3 |
|
2W cos Зн cos |
2WВ sin |
|
|
|
|
При відсутності вертикальної складової (WВ=0) і довороті антени на кут Θ=ψ+αЗн зсув по кожному з
променів буде однаковий по величині і максимальний FД max=2(W / λ)·cosφ, але з різними знаками.
По різниці доплерівських зсувів частот двох каналів
ΔF12=FД1-FД2=2FД max·cos[ψ+ (αЗн-θ)]
після компенсації зносу (Θ=αЗн) можна знайти шляхову швидкість (горизонтальну складову), по сумі
ΣF12=FД1+FД2=-4 =2(WВ / λ)·sinφ
– вертикальну складову, а по куту довороту антени – кут зносу.
В двохпроменевих ДВШКЗ кут зносу визначається методом |
|
максимуму, при якому чутливість до повороту і точність невисокі. |
10 |
07/07/19 |