

НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ Житомирський військовий інститут ім. С.П.Корольова
Кафедра бойових авіаційних комплексів та радіотехнічного забезпечення
Розділ IV
“Експлуатація і ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет”
Тема 20-3. “Автономні засоби радіонавігації“
Доцент кафедри кандидат технічних наук, доцент Войчук В. А.
Київ 2013
07/07/19 |
1 |
Навчальна та виховна мета
1.Засвоїти принципи побудови та основи бойового застосування і технічної експлуатації автономних засобів радіонавігації.
2.Виховувати у студентів – майбутніх фахівців авіації Повітряних Сил ЗСУ самостійність, творчу ініціативу, наполегливість та високу відповідальність за якісну організацію технічної експлуатації та вміле бойове застосування автономних засобів радіонавігації.
Навчальні питання
1.Навігаційне забезпечення ведення бойових дій на малих та гранично малих висотах.
2.РЛС профільного польоту.
07/07/19 |
2 |

Контрольні завдання (АЗРН3)
1.Як впливає ширина ДСА в горизонтальній площині на якість інформації про підстилаючу поверхню (1 бал)?
2.Як впливає ширина ДСА у вертикальній площині на якість інформації про підстилаючу поверхню (1 бал)?
3.Як впливає тривалість зондуючого сигналу на якість інформації про підстилаючу поверхню (1 бал)?
4.Проаналізуйте вплив на роботу РПЗ бокових пелюстків ДСА у горизонтальній площині (1 бал).
5.Проаналізуйте вплив на роботу РПЗ бокових пелюстків ДСА у вертикальній площині (1 бал).
6.Запропонуйте принцип роботи РПЗ для забезпечення планового відображення рельєфу ділянки місцевості (1 бал).
7.Обгрунтуйте вибір одного з 4-х варіантів форми поперечного січення і взаємного положення пелюстків ДСА для РПЗ (1 бал).
1) |
2) |
3) |
4) |
Примітка: Мінімальна сума балів по темі для отримання позитивної оцінки - Σ=(АЗРН1+АЗРН2+АЗРН3)=7,8.
Максимальна сума зарахованих балів по темі – Σ=(АЗРН1+АЗРН2+АЗРН3)=13.
07/07/19 |
3 |

6. Навігаційне забезпечення бойових дій на малих і гранично малих висотах
Особливості ведення бойових дій на малих і гранично малих висотах
Маловисотний політ – ефективний спосіб подолання ППО:
1.Дальність виявлення літака над сферичною поверхнею Землі обмежена дальністю прямої видимості DПВ км 4.15 
 H м .
H м .
2.Нерівності поверхні та об'єкти на ній екранують літак і додатково обмежують дальність дії наземних РЛС ППО.
3.Місцеві об'єкти біля позиції наземної РЛС створюють інтенсивні пасивні перешкоди.
4.Автоматичне супроводження маловисотної цілі утруднюється відбитими Землею сигналами – ефект “антиподу”.
5.Засоби ППО мають обмежений час на перехоплення маловисотного літака.
07/07/19 |
4 |

Проблеми, що виникають на борту при польотах і веденні бойових дій на малих висотах:
1.Велика ймовірність зіткнення з підстилаючою поверхнею та розташованими на ній об'єктами;
2.Обмежені поле спостереження і залишок часу на обробку інформації, прийняття рішення, управління бортовими системами і літаком;
3.Швидко змінюється і важко сприймається зміна обстановки, особливо при польоті на великій швидкості;
4.Вкрай утруднене візуальне спостереження та орієнтація на місцевості;
5.Вкрай утруднене або навіть неможливе пілотування літака вручну.
Р |
|
- ймовірність зіткнення з Землею |
||||||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- ймовірність збиття засобами ППО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- середній ризик зіткнення і збиття |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RСер=с1·РЗіткн+с2·РППО |
- ймовірність подолання ППО
0 |
НОпт |
Н |
5 |
|

Інформаційне забезпечення маловисотного польоту (МВП)
Необхідне інформаційне забезпечення:
-детальна достовірна і гарантована інформація про рельєф підстилаючої поверхні по курсу польоту з упередженням, достатнім для прогнозу можливої ситуації і управління нею;
-гарантоване знання поточного місцеположення літака;
-гарантована інформація про істинну поточну та прогнозовану висоту польоту над підстилаючою поверхнею і розташованими на ній об'єктами;
-діюча в реальному масштабі часу система обробки поточної інформації, її відображення та формування команд управління літаком.
Вимоги до системи управління літаком:
-автоматичне або автоматизоване управління з можливістю в будь- який момент переходу до ручного управління;
-автоматичний маневр, гарантуючий безпеку польоту при порушенні інформаційного забезпечення МВП або при раптовому виникненні незпрогнозованих небезпечних ситуацій.
07/07/19 |
6 |

Способи інформаційного забезпечення МВП
1. Використання високоточних топографічних карт і високоточних навігаційних систем.
Обмеження:
-проблеми з отриманням детальних топографічних карт території противника;
-невідомі зміни, які сталися з рельєфом місцевості на інтервалі часу між топоз’йомкою і польотом над відповідною ділянкою поверхні;
-можливість появи штучних нерухомих і рухомих споруд.
2. Використання високоточних автономних бортових локаційних засобів отримання інформації про рельєф місцевості по курсу польоту.
Лазерні локатори забезпечують отримання високоякісної інформації тільки в прозорій атмосфері.
Інфрачервоні пасивні локатори тільки в прозорій атмосфері дають
детальну інформацію про нестабільний тепловий рельєф місцевості, який може непередбачувано змінюватись.
Радіолокатори видають інформацію про рельєф місцевості при будь-якому стані атмосфери, але нижчої якості, ніж лазерні та інфрачервоні локатори.
07/07/19 |
7 |

Основні вимоги до технічного засобу інформаційного забезпечення МВП
Вимоги до технічного засобу отримання інформації про рельєф підстилаючої поверхні (РЛС профільного польоту) по курсу польоту:
-незалежність від метеоумов і стану атмосфери;
-можливість детального спостереження і визначення характеристик підстилаючої поверхні і окремих об'єктів на поверхні (високих споруд, веж, опор ліній електропередачі, тощо) на дальностях, які забезпечують оцінку обстановки і безпеку маловисотного польоту обраним способом;
-безперервна інформація про дальність і кутові координати всіх фрагментів підстилаючої поверхні і об'єктів на ній;
-автономність.
Найбільш повно таким вимогам відповідають трьохкоординатні РЛС сантиметрового та міліметрового діапазонів хвиль, побудовані на принципах активної радіолокації.
07/07/19 |
8 |
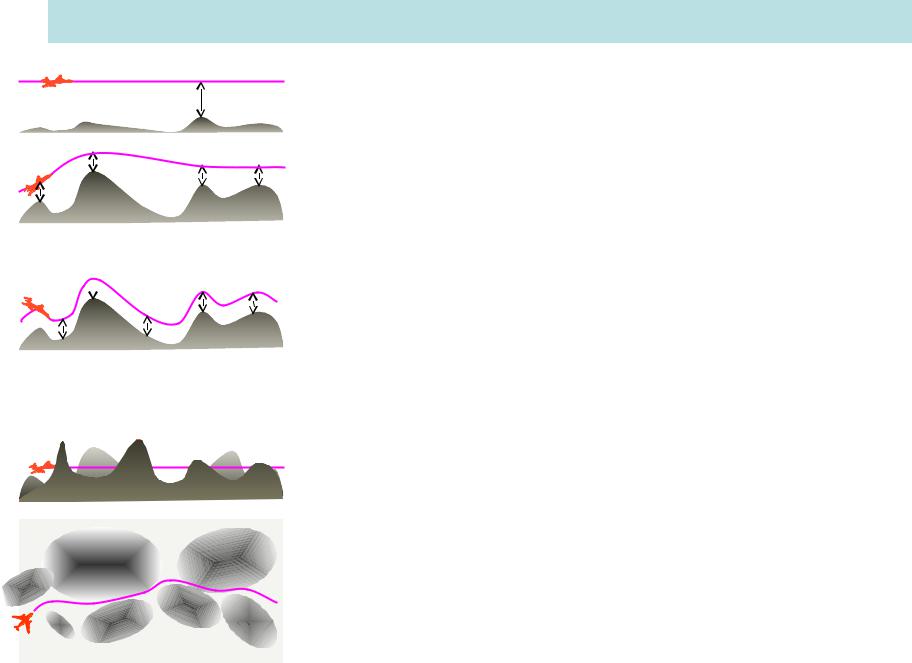
1)НБар=НБезп=const
НБезп
2)
ΔНВ=const
3) ΔН=const
ΔН=const
4) |
Н=const |
Н=const
07/07/19
Способи виконання МВП
1.Політ на безпечній висоті: просте інформаційне забезпечення, просте пілотування, можливість автоматизації, можливе пілотування вручну.
2.Обліт вершин перешкод на обраному маршруті з постійним перевищенням над
вершинами: нескладне інформаційне забезпечення, просте пілотування, можливість автоматизації, можливе пілотування вручну.
3.Обліт перешкод на обраному маршруті з постійним перевищенням: складне інформаційне забезпечення, складне пілотування особливо на великих швидкостях, можливість автоматизації, пілотування можливе тільки в автоматичному чи директорному режимах.
4.Обхід перешкод на постійній висоті
маневруванням в горизонтальній площині: дуже складне інформаційне забезпечення, складність автоматизації, в залежності від обставин можливе пілотування в ручному, директорному чи автоматичному режимі.
Найкращий результат дає комплексне |
|
використання різних способів МВП. |
9 |

Визначення прогнозованої висоти польоту в упередженій точці
W |
DГ |
|
βЗ |
βУ Δβ |
|
|
DУ |
H |
HЗ |
|
У |
|
DЗ |
|
|
D |
|
Площина кліренсу |
HП |
|
ΔD
DУ>>HУ;
DГ≈ DУ; HУ≈ βУ·DУ; HП≈ Δβ·DУ
Упередження tУ інформації щодо прогнозу висоти НУ прольоту над перешкодою потрібне для виконання маневру з метою запобігання зіткнення з перешкодою.
Для визначення висоти перешкоди НП над площиною кліренсу (відповідає заданій висоті НЗ маловисотного польоту) або прогнозованої
висоти прольоту над перешкодою НУ треба: а) контролювати упереджену DУ або горизонтальну DГ дальності, б) знати напрямок βУ на упереджену точку.
Для інформаційного забезпечення МВП з маневруванням у вертикальній площині достатньо контролювати січення підстилаючої поверхні вертикальною площиною, в якій знаходиться вектор шляхової швидкості.
Для інформаційного забезпечення МВП з маневруванням у горизонтальній площині необхідно контролювати рельєф у межах сектору можливого маневру.
07/07/19 |
10 |