

Принцип дії і особливості конструкції РЛС ПП
Загальні відомості про РЛС ПП
РЛС профільного польоту літак Су-24 входить до складу контуру маловисотного польоту і призначена для інформаційного забезпечення польоту над земною поверхнею на заданій висоті маневруванням у вертикальній площині при автоматичному, напівавтоматичному (директорному) або ручному управління літаком.
Задачі:
1.У складі контуру маловисотного польоту – забезпечення маловисотного польоту на заданій постійній висоті відносно підстилаючої поверхні шляхом визначення прогнозованої висоти прольоту над перешкодою на упередженій дальності.
2.У складі прицільно-навігаційної системи – по цілевказанню від ПНС за напрямком визначення похилої дальності до наземної, надводної або повітряної цілі для забезпечення прицілювання і застосування зброї.
07/07/19 |
21 |

Тактичні характеристики
Режим роботи – МВП (маловисотний політ).
1.Задані висоти польоту – НЗ=200, 300 або 400 м. 2.Крутизна схилів підстилаючої поверхні – ≤300. 3.Перепад висот підстилаючої поверхні – ≤2 км. 4.Максимальна упереджена дальність – 5 км.
5.Помилка визначення прогнозованої висоти прольоту – 0.35НЗ. 6.Час упередження – 10 с.
Режим роботи – БЗ (бойові задачі).
1.Діапазон вимірюємих дальностей наземних цілей – ≤7 км. 2.Діапазон вимірюємих дальностей повітряних цілей – ≤10 км. 3.СКП вимірювання дальності – 50 м.
4.Цілевказання по азимуту і куту місця – зовнішнє.
07/07/19 |
22 |

Технічні характеристики
1.Довжина хвилі – 3 см.
2.Тривалість зондуючих сигналів – 0.25 … 0.35 мкс.
3.Частота повторення зондуючих сигналів – 2000 Гц.
4.Ширина ДСА у горизонтальній площині – 30 30’.
5.Ширина ДСА у вертикальній площині – 60 40’.
6.Ширина “стиснутої” ДСА – 20’…30’.
7.Сектор відхилення ДСА по азимуту – 150.
8.Сектор відхилення ДСА по куту місця – -280 … +500.
Склад РЛС ПП
1.РФ-1 – антена.
2.РФ-2М – передавач.
3.РФ-3 – приймач.
4.РФ-11 – сервопідсилювач.
5.РФ-22М – обчислювач.
6.РФ-33 – синхронізатор і дальномір.
07/07/19 |
23 |
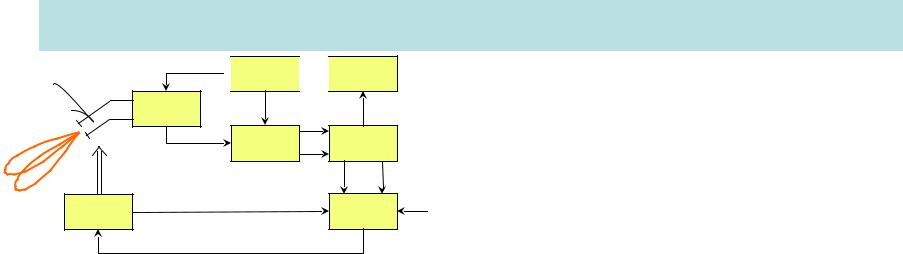
Принцип дії РЛС ПП (структурна схема)
Σ АП
АП 
 Прд
Прд
СРП |
Σ |
Σ |
ІЗП |
|
|
Прм |
С+Д |
|
|
|
|
|
||
|
β |
D |
|
DВ |
КУА |
|
Обч |
НЗ |
|
|
|
V |
||
Упр. ант. ΔD |
|
|
|
|
СРП – сумарно-різницевий перетворювач АП – антенний перемикач
Прд, Прм – передавач, двохканальний приймач С+Д – синхронізатор і дальномір Обч – обчислювач КУА – канал управління антеною
Некогерентна періодична послідовність зондуючих сигналів через антенний перемикач надходить в антену і випромінюється сумарною ДСА. Відбиті сигнали сумарної ДСА надходять в двохканальний приймач через антенний перемикач, а різницевої ДСА – безпосередньо. Виділені обвідні сигналів Σ і використовуються в дальномірі для формування імпульсу РСН.
По затримці імпульсів РСН відносно імпульсів запуску передавача (ІЗП) в дальномірі визначається дальність D до фрагменту підстилаючої поверхні на рівносигнальному напрямку.
В обчислювачі розраховується потрібна упереджена дальність DУ=10V,
тобто на маневр у вертикальній площині для уникнення зіткнення з |
|
перешкодою передбачено 10 с. |
24 |
|
Режим МВП
В обчислювачі виміряна дальність D порівнюється з розрахованою упередженою дальністю DУ і виробляється сигнал управління антеною
ΔD=DУ-D.
Слідкуюча система каналу управління антеною підтримує положення антени у вертикальній площині таким, щоб ΔD=0: при цьому РСН орієнтовано в упереджену точку, виміряна дальність D=DУ і датчик положення антени у вертикальній площині вказує напрямок на упереджену точку βУ.
Прогнозована висота прольоту над фрагментом поверхні на упередженій дальності становить Ну≈βУ·D=βУ·DУ.
Якщо в сумарному сигналі з'являється провал до рівня внутрішніх шумів, то це є результат затінення частини підстилаючої поверхні на зворотній стороні вершини перешкоди. Якщо такий провал з'являється на дальності D<DУ, то РЛС переводиться у режим відслідковування “вершини” перешкоди, радіогоризонту – не обов'язково самої високої точки перешкоди. При цьому дальність вершини DВ вимірюється по інтервалу часу від чергового імпульсу запуску передавача (ІЗП) до різкого спаду сигналу Σ.
Слідкуюча система каналу управління антеною забезпечує супроводження вершини перешкоди.
Прогнозована висота прольоту над вершиною Ну≈βВ·D=βВ·DВ.
25
Коли дальня границя області радіотіні стане меншою упередженої дальності, РЛС перейде в звичайний режим роботи.
В горизонтальній площині антена орієнтується по вектору швидкості літака.
Режим БЗ
Антена РЛС по цілевказанню від ПНС рівносигнальним напрямком орієнтується на атакуєму ціль.
Врежимі ЗЕМЛЯ дальність визначається по затримці імпульсів РСН відносно відповідних ІЗП.
Врежимі ПОВІТРЯ відбитий точковою ціллю сигнал являється
коротким радіоімпульсом тривалістю 0.25 … 0.35 мкс. Тому дальність визначається по затримці імпульсних сигналів Σ відносно відповідних
ІЗП.
07/07/19 |
26 |

Питання для самоконтролю
1.Особливості навігаційного забезпечення польотів і бойових дій на малих і гранично малих висотах.
2.Бортова система забезпечення маловисотного польоту.
3.Принципи упередженого отримання інформації про характер рельєфу місцевості.
4.РЛС профільного польоту.
07/07/19 |
27 |

Завдання на самостійну роботу
1.Конспект по темі заняття доповнити матеріалом з навчального посібника і підручників:
2.Презентація АЗРН3.ppt.
3.П.И.Дудник. Авиационные радиолокационные устройства. – М.: ВВИА им. Н.Е.Жуковского, 1976.
4.В.А.Войчук, В.І.Романенко, Д.В.Васягін. Експлуатація й ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет. (Електронний підручник). – К.: НАУ, 2011, тема 20.
07/07/19 |
28 |