

Integrator1
1 s
Integrator2
-K-
Gai n2
<= ST OP
1 Constant
10
Gai n1
-K-
Gai n3
0
Constant1
Rel ati onal Stop Si m ul ati on
Operator
|
|
|
|
|
| ||
Xy Graph
36.97
Di
spl
ay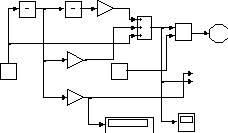
Scope
Рис. 4.7. Структурная схема модели траектории камня
Вертикальная составляющая начальной скорости камня задается блоком Gain1, горизонтальная составляющая - блоком Gain3, ускорение земного тяготения – блоком Gain2. Значение текущей высоты полета камня как функции времени формируется на выходе сумматора. Сигнал окончания моделирования формируется блоками Relational Operator и Stop Simulation в момент времени, когда
высота y сравняется с нулем. Показания цифрового регистратора соответствует длине пути по горизонтали, пройденной камнем до момента соприкосновения с землей. На рис. 4.8 и 4.9 показаны соответственно траектория камня на экране виртуального двухкоординатного регистратора и график изменения во времени высоты полета камня.
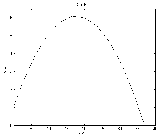
Рис.4.8. Траектория полета камня, брошенного под углом 30 градусов к горизонту с начальной высоты 1м, с начальной скоростью 20 м/cек.
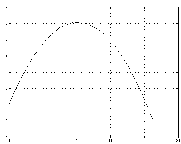
Рис.4.9. График изменения во времени высоты полета камня.
5. Обратимость моделей и задачи оптимизации
Методы аналогового моделирования являются мощной общепризнанной технологией изучения широкого круга проблем естествознания и техники. Теория квазианалогового моделирования, предложенная и развитая в работах академика Г.Е. Пухова и его последователей в 70-х годах прошлого века, существенно расширила использование методов математического и компьютерного моделирования [2-5, 22, 23]. Однако, дальнейшее развитие и использование моделирования для решения задач анализа, синтеза, управления динамическими системами существенно сдерживалось рядом особенностей элементной базы аналоговой вычислительной техники и самим способом представления информации в аналоговых структурах. Среди этих ограничений следует упомянуть следующие:
− низкая точность задания параметров аналоговых решающих элементов;
− существенная зависимость параметров от различных внешних факторов (изменение температуры, влияние электромагнитных наводок и шумов и т.п.);
− низкая степень автоматизации ввода исходных данных, набора топологии моделирующей среды и вывода результатов моделирования.
Разработка аналого-цифровых вычислительных машин и комплексов частично ослабляла негативное влияние указанных
факторов на совершенство аналогового подхода, однако, радикально не решала проблемы существенного совершенствования аналоговых
структур.
В настоящее время благодаря развитию мощных программных комплексов моделирования и, в особенности, методов графического и визуального программирования [1, 16, 27], предоставляющих разработчику моделирующих структур виртуальный инструментарий и широкий набор виртуальных решающих блоков, появилась реальная возможность снова обратиться к технологии аналогового и квазианалогового моделирования.
Данная раздел построен следующим образом. Рассмотрены свойства обратимых и необратимых решающих элементов моделирующих структур, реализующих математические выражения в
явной и неявной формах. Далее кратко описан ряд виртуальных
решающих блоков графических приложений комплекса MATLAB/ Simulink/SimPowerSystem и их назначение, разработаны структуры виртуальных моделирующих цепей для решения систем линейных
алгебраических уравнений, неравенств и задач линейного программирования. Рассмотрение проводится на простых иллюстративных примерах.