

§1.2. Фундаментальные принципы управления
Зная, статические и динамические свойства управления системы, можно построить математическую модель системы и найти такой алгоритм управления, который обеспечивает заданный алгоритм функционирования при известных, заданных воздействиях. Однако модель всегда приближенно выражает свойства оригинала, а возмущающие воздействия могут изменяться не известным заранее образом, поэтому при найденном алгоритме управления фактическое поведение системы будет отличаться от желаемого, определяемого алгоритма функционирования.
Чтобы приблизить поведение к требуемому, алгоритм управления нужно увязать не только со свойствами системы и алгоритмом функционирования, но и с фактическим функционированием системы.
В технике известны и используются три фундаментальных принципа: разомкнутого управления, компенсации и обратной связи.
Принцип разомкнутого управления
Сущность принципа состоит в том, что алгоритм управления вырабатывается только на основе заданного алгоритма функционирования и не контролируются другими факторами - возмущениями или выходными координатами процесса. Общая функциональная схема системы имеет вид:
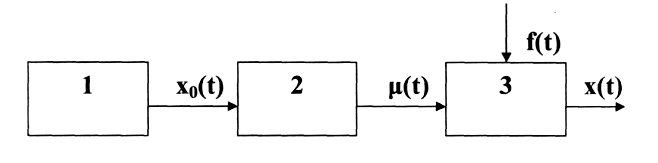
Задание x0(t) алгоритма функционирования может вырабатываться как специальным техническим устройством - задатчиком программы 1, так и выполняться заранее при проектировании системы, и затем непосредственно использоваться при конструировании управляющего устройства 2. В последнем случае блок 1 на схеме отсутствует. Схема имеет вид разомкнутого контура, в котором основное воздействие передается от входного элемента к выходному элементу 3 как показано стрелками. Это и дало основание принципа. Близость х0 и х в разомкнутых системах обеспечивается только конструкцией и подбором физических закономерностей, действующих во всех элементах.
Принцип компенсации (управление по возмущению)
Если возмущающие воздействия настолько велики, что разомкнутая цепь не обеспечивает требуемой точности выполнения алгоритма функционирования, то для повышения точности иногда возможно, измерив, возмущение, ввести по результатам измерения коррективы в алгоритм управления, которые компенсировали бы вызываемые возмущениями отклонения алгоритма функционирования.
Так как отклонение регулируемой величины зависит не только от управляющего μ (вектора управления), но и от возмущающего f воздействия, то есть X = F1(μ, f), то в принципе можно подобрать управление μ=F2(f) таким образом, чтобы в установившемся режиме отклонение отсутствовало, то есть
![]()
Функциональная схема регулирования по возмущению имеет вид:
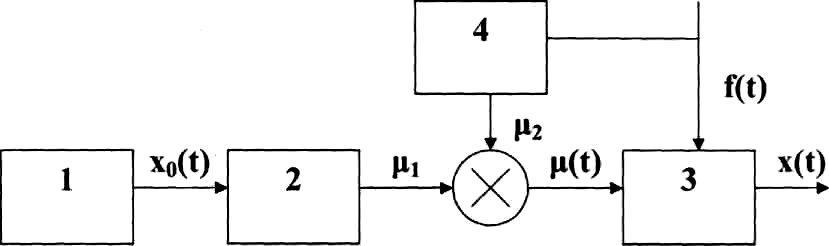
Регулирование в функции возмущающего воздействия позволяет получить неизменное значение выходной переменной в определенном диапазоне изменения этого возмущения. Такой способ называется принципом регулирования по возмущению. Однако при таком регулировании не учитывается и не компенсируется отклонение выходной переменной, вызываемое другими факторами.
Устройство, осуществляющее управляющее воздействие на регулятор в функции возмущающего воздействия, можно назвать компенсирующей связью.
При наличии нескольких возмущающих воздействий регулятор должен иметь компенсирующие связи по каждому из этих возмущений, чтобы обеспечить поддержание выходной переменной на заданном уровне. При этом усложняется конструкция регулятора и потребуется большое количество разнообразных элементов.
Принцип обратной связи. Регулирование по отклонению.
Если сигнал обратной связи, подаваемый на вход системы, пропорционален только значению выходной переменной объекта в любой момент времени, то обратная связь называется жесткой. Если же сигнал обратной связи, подаваемый на вход системы, появляется не только при изменении выходной переменной объекта, но и ее производных, то обратная связь называется гибкой.
Если главная обратная связь жесткая, то она позволяет сравнить заданное и действительное значения регулируемой переменной и выявить имеющиеся отклонения (рассогласование, сигнал ошибки). Полученное отклонение поступает на вход регулятора, обеспечивающего поддержание выходной переменной на заданном уровне. Такой принцип называется регулированием по принципу отклонения регулируемой переменной от заданного значения (принцип Ползунова).