

4.4.1. Методика побудови графічних умовних позначень приладів на функціональних схемах автоматизації
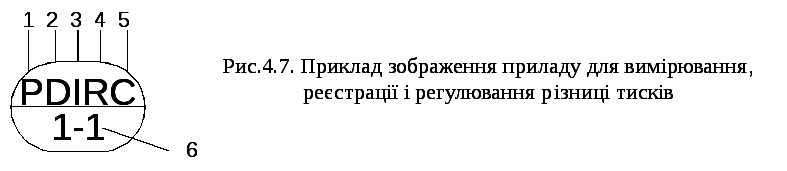
Приклад побудови умовних графічних позначень приладів на ФСА приведений на мал. 4.7. У верхній частині кола наносяться літерні позначення вимірювальної величини і функціонального признаку приладу.
Порядок розташування літерних позначень (зліва направо) повинен бути наступним:
1. Позначення основної вимірювальної величини.
2. Позначення, уточнююче (як що це необхідно) основну вимірювану величину.
3. Позначення функціонального признаку приладу.
В нижній частині кола наносять позиційне позначення (цифрове або літерно-цифрове), яке служить для нумерації вимірювання або регулювання або окремих елементів комплекту по замовленій специфікації проекту.
Приклад побудови умовного позначення приладу.
1- вимірювана величина (Р- тиск);
2- уточнення вимірюваної величини (D- перепад тиску);
3,4,5 - функціональні признаки приладу (І- показ, R- реєстрація, С- автоматичне регулювання );
6- 1-1 - номер позиції по ФСА.
При побудові умовних позначень приладів варто показувати лише ті функціональні ознаки, які використані в цій схемі. Для прикладу, на мал.. 4.9. представлений прилад який може показувати значення різниці тисків, забезпечує реєстрацію даного параметру і може бути використаним як позиційний регулятор.
В поставленій задачі необхідно забезпечити реєстрацію перепаду тисків і сигналізацію відхилень параметра за допустимі межі (легко реалізується позиційним регулятором). Тоді ознаки цього приладу записують наступним чином: PDRA
 Щоб
бути впевненим при самостійній побудові
умовних позначень приладів слід пам’ятати
про деякі особливості застосування
окремих літер.
Щоб
бути впевненим при самостійній побудові
умовних позначень приладів слід пам’ятати
про деякі особливості застосування
окремих літер.
Літеру S- позначення контактного пристрою приладу, що використовується тільки для включення, відключення, блокування і т.п. Позначати буквою S функції регулювання (в т.ч. позиційного) не допускається. Застосовують літери S і А для позначення контактного пристрою для включення і відключення, і одночасно сигналізації.
Для конкретизації вимірюваної величини справа від графічного зображення приладу повинні вказуватися найменування або символ вимірюваної величини, наприклад напруга, сила струму і т.д.
У випадку необхідності допускається біля зображення приладу вказувати вид радіоактивності, наприклад α, β - або γ-випромінювання.
Літеру U допускається використовувати для позначення приладу, що вимірює декілька різнорідних величин. Розшифровка вимірюваних величин повинна бути приведена біля зображення приладу або на полі креслення.
Величини, які багатократно використовуються, повинні позначатися одною і тою ж самою резервною буквою. Не допускається в одній і тій же документації використовувати одну резервну букву для позначення різних величин.
В обґрунтованих випадках щоб уникнути неправильного розуміння схеми допускається замість умовних позначень приводити повне найменування перетворених сигналів. Також рекомендується позначати деякі рідко застосовувані чи специфічні сигнали, наприклад кодовий, часо-імпульсний, число-імпульсний і т.д.;
При побудові умовних позначень за ГОСТ 21.404—85 передбачаються наступні виключення:
1)усі пристрої, виконані у вигляді окремих блоків і призначені для ручних операцій, повинні мати на першому місці в позначенні букву Н незалежно від того, до складу якого вимірювального комплекту вони входять, наприклад, перемикачі електричних кіл вимірювання (керування), перемикачі газових (повітряних) ліній позначаються HS, байпасні панелі дистанційного керування - НС, кнопки (ключі) для дистанційного керування, задавачі - Н і т. п.;
при позначенні комплекту, призначеного для вимірювання декількох різнорідних величин, первинні вимірювальні перетворювачі (давачі) варто позначати відповідно до вимірюваної величини, вторинний прилад – UP;
в окремих випадках при побудові позначень комплектів, призначених для вимірювання якості непрямим методом, перша літера в позначенні давача може відрізнятися від першої літери в позначенні вторинного приладу (наприклад, для вимірювання якості продукту користуються методом температурної депресії).
Давачами температури при цьому є термометри опору, вторинним приладом - автоматичний міст. Позначення такого комплекту при розгорнутому способі будуть наступним : давачі - ТІ, вторинний прилад - QR.
Літерні умовні позначення на функціональних схемах ДСТУ Б А.2.4.-3-95.
Таблиця. 4.6.
|
Позначення |
Вимірювана величина |
Функції котрі виконуються приладом | |
|
|
Основне значення першої літери |
Додаткове значення |
|
|
A |
|
|
Сигналізація |
|
C |
|
|
Регулювання |
|
D |
Щільність, густина |
Різниця, перепад |
|
|
E |
Будь яка електрична величина |
|
Первинне перетворення |
|
F |
Витрата |
Співвідношення, частка, дріб |
|
|
G |
Розмір, положення, переміщення |
|
|
|
H |
Ручний вплив |
Верхня межа |
Ручна дія |
|
I |
|
|
Показ, індикація |
|
J |
|
|
Автоматичне пере- микання, оббігання |
|
K |
Час, часова програма |
|
Станція керування |
|
L |
Рівень |
Нижня межа |
|
|
M |
Вологість |
|
|
|
N |
|
|
Підсилення |
|
O |
Резервна літера |
|
|
|
P |
Тиск, вакуум |
|
|
|
Q |
Якість, склад, концентрація |
Інтегрування, додавання |
|
|
R |
Радіоактивність |
|
Реєстрація |
|
S |
Швидкість, частота |
|
Включення, виключення, перемикання |
|
T |
Температура |
|
Проміжне перетворення, дистанційна передача |
|
U |
Кілька різнойменних величин |
|
|
|
V |
В’язкість |
|
|
|
W |
Маса |
|
|
|
Y |
|
|
Перетворення, обчислення функції |
Додаткові позначення, які характеризують функціональні ознаки перетворювачів сигналів і обчислювальних приладів ДСТУ Б А.2.4.-3-95.
Таблиця. 4.7.
|
№ п/п |
Назва |
Позначення |
|
1 |
Ряд енергії сигналу: - електричний - пневматичний - гідравлічний |
Е Р G |
|
2 |
Види форм сигналу: - аналоговий - дискретний |
A D |
|
3 |
Операції, які виконуються обчислювальним приладом: - сумування - множення величини на постійний коефіцієнт - перемножування величин двох і більше сигналів - ділення величин сигналів один на оден - піднесення величини сигналу в степінь
- добування з величини сигналу кореня степеня - логарифмування - деференціюваня
- інтегрування - зміна знаку сигналу - обмеження верхнього значення сигналу - обмеження нижнього значення сигналу |
K
×
:
Lg dx/dt
x(-1) max min |
|
4 |
Зв’язок з обчислювальним комплексом: - передача сигналу на ЕОМ - вихід інформації з ЕОМ |
|



