

Teoretichna_mekhanika_24_12_12
.pdfr sin r ,
де найкоротша відстань від т. М до осі обертання (радіус обертання точки М).
Тобто, швидкості точок твердого тіла, що обертається навколо нерухомої осі розподіляють в тілі вздовж радіуса обертання по лінійному закону, тобто при 0 0 0,
а при R R ;
Визначення прискорення точок тіла, що обертається навколо нерухомої
осі. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Згідно |
визначення |
прискорення |
і |
на |
підставі |
формули |
Ейлера |
|||||||||||||
прискорення довільної точки М твердого |
тіла, |
що |
обертається |
навколо |
||||||||||||||||
нерухомої осі визначається за формулами |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
dv |
|
d( r) |
|
d |
|
|
|
dr |
|
|
|
|||
|
|
|
|
w |
|
|
|
|
|
|
|
|
r |
|
. |
|
|
|||
|
|
|
|
dt |
|
dt |
|
dt |
dt |
|
|
|||||||||
|
d |
|
dr |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Так як |
|
|
і |
|
, то остаточно матиме |
|
|
|
|
|
||||||||||
dt |
dt |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
w r wоб wдоос. |
|
|
|
||||||||||||
Прискорення довільної точки М дорівнює геометричній прогресії т. М
– wоб і до осьового прискорення точки М – wдоос.
71
Вектор обертального прискорення wоб r І напрямлений до площини, що утворюють вектори у той бік, звідки найкоротший поворот від вектора до вектора r видно таким, який здійснюється проти руху годинникової стрілки. Вектор wоб напрямлений так, як вектор швидкості v.
За величиною обертальне прискорення wоб дорівнює: wоб r sin , r ,
де - найкоротша відстань від т. М до осі обертання. Вектор доосьового прискорення дорівнює
wдоос v.
Вектор wдоос напрямлений перпендикулярно до площини, яку
утворюють вектори і v, у той бік звідки найкоротший поворот від векторадо вектора v,видно проти руху стрілки годинника.
За величиною (модуль) до осьове прискорення wдоос дорівнює
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
wдоос |
v sin( , v) v sin |
|
|
v 2 |
|||||||||||||||||
2 |
|
||||||||||||||||||||
Так як v . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Величина (модуль) прискорення довільної точки |
М твердого тіла, що |
||||||||||||||||||||
обертається навколо нерухомої осі, дорівнює |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
2 2 2 |
|
|
|
|
; |
|||||||||
w |
wоб2 wдоос2 |
|
|
|
2 |
4 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
w |
|
2 4 |
|
|
|
|
|
|
|
|
|
|
||||||
Кут , що утворюється |
|
векторами |
wоб |
|
|
і wдоос , визначається за |
|||||||||||||||
формулою |
|
|
|
wоб |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
tg |
|
|
|
|
; |
|
|
|
||||||||||||
|
wдоос |
2 |
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Окремі випадки обертання твердого тіла навколо нерухомої осі.
а) Якщо кутова швидкість твердого тіла залишається сталоюconst , то обертання тіла називається рівномірним. Кінематичний закон рівномірного обертання тіла має вигляд:
0 t
б) Якщо кутове прискорення твердого тіла є сталою величиною, тобтоconst , то обертання тіла називається рівнозмінним.
Кінематичний закон зміни кутової швидкості при рівно змінному обертанні твердого тіла навколо нерухомої осі має вигляд:
0 t
Кінематичний закон рівно змінного обертання твердого тіла навколо нерухомої осі визначається за формулою
t20 0t 2
72

2.7 Плоскопаралельний рух твердого тіла Плоско паралельним рухом твердого тіла називається такий рух,
при якому всі точки тіла рухаються паралельно деякій нерухомій площині.
(приклад – кочення циліндра по горизонтальній площині так, що його основи залишається весь час паралельною до площини уOz ).
З визначення плоско паралельного руху – будь-яка пряма проведена в тілі перпендикулярно до площини xOy буде рухатись наступально, тобто траєкторії, швидкості та прискорення всіх точок цієї прямої будуть однаковими.
Для визначення руху тіла необхідно знати рух лише однієї точки на кожній такій прямій.
Якщо взяти точки в одній площині, яка є паралельною до нерухомої координатної площини xOy, точки стверджувати, що вивчення плоско паралельного руху тіла зводиться до вивчення руху плоскої фігури, тобто перерізу тіла площиною, паралельною нерухомій координатній площині xOy.
Таким чином, надалі кажучи про плоско паралельний рух твердого тіла будемо мати на увазі рух його перерізу.
Тверде тіло здійснює плоско паралельний рух відносно нерухомої системи координат.
Довільна точка О1 – полюс. Система координат O1x2y2 здійснює рух разом з тілом і залишається завжди паралельною до нерухомої системи Oxy.
Друга система координат O1x1y1, здійснюючи рух разом з тілом розвертається відносно системи координат O1x2y2 або, що те саме відносно системи Oxy.
Координати довільної точки М твердого тіла, яке здійснює плоско паралельний рух, і отже положення самого тіла відносно нерухомої системи координат Oxy будуть визначатися за формулами:
xM x01 x1 a11 y1a12 ;
|
yM y01 x1 a |
21 |
y1a |
22 , |
(2.10) |
де a11 a22 |
cos ; a12 sin ; a |
21 |
sin |
|
|
73

У формулах (2.10) x1 , y1 - сталі величини, а x01,y01,a11,a22,a12,a21 - функції часу.
Отже, маємо
x01 f1(t); |
y01 f2(t); (t) |
(2.11) |
Таким чином, плоско паралельний рух твердого тіла визначається трьома незалежними параметрами: двома координатами полюса О1 і кутом повороту тіла навколо полюса О1.
Тіло, що здійснює плоско паралельний рух, має три ступеня вільності.
Функції (2.11) називаються кінематичними рівняннями плоско паралельного руху твердого тіла.
Плоско паралельний рух твердого тіла розкладається на два рухи: поступальний, який визначається першими двома рівностями і обертальний навколо полюса, який визначається третьою рівністю.
При цьому кут повороту тіла не залежить від вибору полюса. Тоді вектори і є вільними векторами.
Визначення швидкості довільної точки твердого тіла при плоско паралельному русі.
Радіус - вектор rM , який визначає положення довільної точки М:
rM r01 ,
де r01- радіус-вектор положення полюса О1 в системі координат Oxy;
- радіусвектор положення довільної точки М у системі координат O1x2y2;
Тоді швидкість точки М визначається: |
|
|
|||||||
|
dr |
d |
|
|
dr |
d |
|||
|
M |
|
|
(r |
) |
01 |
|
|
(2.12) |
|
dt |
|
|
||||||
|
dt |
01 |
|
dt |
dt |
||||
Похідні dr01 визначає швидкість полюса О1 dt
Тобто 01 dr01 ; dt
Похідна d визначає швидкість точки М відносно рухомої системи dt
координат O1x2y2.
|
|
d |
M01 |
|
|
dt |
Рух твердого тіла відносно системи координат O1x2y2 є обертанням навколо полюса О1:
M01 |
(ф-ла Ейлера) |
і модуль швидкості |
|
M01 O1M
Тоді формула (2.12) набирає вигляду:
M 01 ,
74

Або
M 01 M01 |
(2.13) |
Швидкість довільної точки М твердого тіла, що здійснює плоско паралельний рух дорівнює геометричній сумі швидкості полюса 01 і швидкості M01 точки М при обертанні тіла навколо полюса.
Щоб визначити вектор швидкості довільної точки М при плоско паралельному русі необхідно знати напрям і величину кутової швидкості тіла.
Три способи визначення швидкості точок тіла:
1-й спосіб полюса – на підставі векторної рівності (2.13) побудувати в довільній точці тіла відповідні вектори і визначити величини і напрям вектора швидкості довільної точки тіла як геометричну суму двох векторів.
2-й спосіб проекції – швидкостей двох точок тіла напряму, що сполучає ці точки, рівні між собою
M cos 01 cos
3-й спосіб – визначення швидкості довільної точки твердого тіла, що здійснює плоско паралельний рух, ґрунтується на понятті миттєвого центра швидкостей (МЦШ).
Миттєвим центром швидкостей (миттєвим центром обертання) твердого тіла, що здійснює плоско паралельний рух, називається точка тіла, швидкість якої в даний момент часу дорівнює нулю.
р– миттєвий центр швидкостей.
При плоско паралельному русі миттєвий центр швидкостей існує і ця точка в даний момент часу єдина.
75
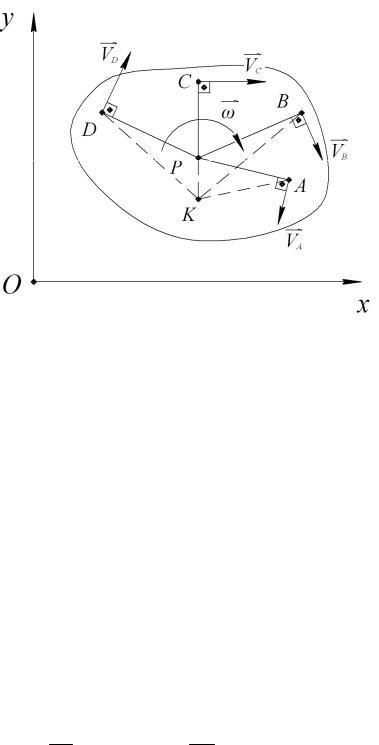
p 0;
Якщо p 0 , то p повинен бути одночасно перпендикулярним рА,
рВ, рС і рD, що неможливо. Точка р - єдина. Якщо взяти т. К то проекції векторів на відрізки не 0.
Якщо за полюс при плоско паралельному русі тіла взяти миттєвий центр швидкостей, то швидкість довільної точки визначиться виразом:
M Mp
або
M pM ,
де Mp - вектор швидкості довільної точки М тіла при його обертанні
навколо миттєвого центра швидкостей;- кутова швидкість обертання тіла;
рМ – вітань від миттєвого центра швидкостей до довільної точки М тіла.
Тоді: D pD ; C pC; B pB; A pA.
Знаючи положення миттєвого центра швидкостей, можна визначити швидкість усіх точок тіла, що здійснює плоско паралельний рух, якщо відома швидкість будь-якої точки тіла (модуль вектора швидкості і його напрям).
D - відома; тоді D ; B pB D pB. pD pD
76

2.8 Окремі випадки визначення миттєвого центра швидкостей:
1.Якщо вектори швидкостей точок А і В твердого тіла, що здійснює плоско паралельний рух, паралельні і одночасно перпендикулярні до відрізка АВ, мають однаковий напрям і не рівні між собою, то МЦШ розміщений на продовженні АВ у точці перетину з прямою, яка сполучає кінці векторів швидкостей цих точок.
2.Якщо вектори швидкостей точок А і В паралельні і перпендикулярні до відрізка АВ, мають протилежні напрями, то МЦШ лежить на відрізку АВ у точці його перетину з відрізком, який сполучає кінці векторів швидкостей A і B точок А і В.
3. Якщо відомі напрями векторів швидкостей двох точок А і В твердого тіла, що здійснює плоско паралельний рух, то МЦШ розміщений у точці перетину перпендикулярів, проведено з т.А і В до векторів швидкостей
A і B .
77

4. Якщо тверде тіло, що здійснює плоско паралельний рух, котиться без ковзання по нерухомій поверхні (прямолінійній чи криволінійній), то МЦШ лежить у точці дотику твердого тіла з площиною.
5. Якщо вектори швидкостей двох точок А і В паралельні і не перпендикулярні до відрізку АВ, або вектори швидкостей двох точок паралельні і рівні між собою, то МЦШ у даний момент не існує, кутова швидкість дорівнює нулю і тверде тіло здійснює миттєво – поступальний рух.
Для аналітичного визначення швидкості довільної точки М необхідно її координати за формулами:
xM x01 x1 cos y1 sin yM y01 x1 sin y1 cos
Диференціюючи ці вирази, отримаємо проекції швидкості довільної т. М на осі нерухомої системи відміну Oxy:
xM x01 (x1 sin y1 cos )
yM y01 (x1 cos y1 sin )
Модуль швидкості т. М:
M 
 x2M y2M
x2M y2M 
 x01 (x1 sin y1 cos ) 2 y01 (x1 cos y1 sin 2
x01 (x1 sin y1 cos ) 2 y01 (x1 cos y1 sin 2
78

Напрям вектора швидкості т. М визначається за допомогою напрямних косинусів
cos( M ,x) xM ; cos( M ,y) yM ;
M M
Визначення прискорення довільної точки твердого тіла при плоскопаралельному русі.
На підставі формули швидкості т. М при плоско паралельному русі:
M 01
іза визначенням прискорення, маємо:
|
|
d |
M |
|
d |
|
|
|
|
|
d |
01 |
|
d |
|
|
d |
|
|||
W |
|
|
|
|
|
( |
|
|
) |
|
|
|
|
|
|
|
|||||
|
|
|
dt |
|
|
|
|
dt |
|
dt |
|||||||||||
M |
|
dt |
|
01 |
|
|
|
dt |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W |
|
M01 |
W Woб |
Wдоос W W ; |
|||||||||||||||||
01 |
|
|
|
|
|
|
|
|
|
01 |
|
M01 |
|
|
М01 |
|
01 M01 |
||||
|
|
|
|
d 01 |
|
|
|
|
|
|
|
де |
|
W |
- прискорення полюса О1; |
|
|||||||
|
|
|
|||||||||
|
|
|
|
dt |
01 |
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
- кутове прискорення твердого тіла при обертанні навколо полюса О1 |
|||||||
|
dt |
||||||||||
|
|
|
|
|
|
|
|
|
|||
|
d |
|
|
|
|
|
|
|
|||
|
|
|
|
MO |
- швидкість т.М твердого тіла при обертанні тіла навколо полюса |
||||||
|
dt |
||||||||||
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
О1. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
Векторний |
|
- вектор обертального прискорення |
|||||
|
|
|
|
добуток Woб |
|||||||
|
|
|
|
|
|
|
|
|
|
MO |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
т.М при обертанні тіла навколо полюса О1. |
|||||||||||
|
|
|
|
Вектор |
W Woб |
Wдоос - повне прискорення т.М при обертанні тіла |
|||||
|
|
|
|
|
|
|
01 |
M01 |
|
М01 |
|
навколо О1.
Векторний добуток M01 WМдоос01 - вектор до осьового прискорення т.М при обертанні тіла навколо полюса О1;
За модулем прискорення W01,WMoб01,WМдоос01 дорівнюють:
WMoб01 O1M; WМдоос01 2 2 O1M;
|
|
|
|
|
|
|
|
|
|
(Wоб |
)2 (Wдоос )2 |
|
( )2 ( 2 )2 |
2 4 ; |
|||||
W |
|||||||||
M01 |
|
MO |
MO |
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
||
79

Кути між векторами WM01 і WМдоос01
tg |
|
|
|
WMOоб |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
||||||||||
|
|
|
доос |
|
|
2 |
|
2 |
|||||||
|
|
|
|
||||||||||||
|
|
|
|
WMO |
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
Щоб визначити вектор прискорення довільної точки тіла при плоско паралельному русі, необхідно знати напрям і величину вектора прискорення полюса, а також напрям і величину кутової швидкості і кутового прискорення тіла.
Далі на підставі векторної рівності: WM W01 WMoб01 WМдоос01 Побудувати в довільній точці М відповідні вектори і визначити
величину і напрям вектора прискорення довільної точки тіла як геометричну суму трьох векторів.
Визначення прискорення точок твердого тіла за допомогою миттєвого центра прискорень (МЦП).
Прискорення довільної точки тіла, що здійснює плоско паралельний рух, визначається як геометрична сума прискорень полюса і прискорення довільної точки при обертанні тіла навколо полюса.
В кожний момент часу існує точка, прискорення якої дорівнює нулю – миттєвий центр прискорень.
80