

11.3. Третє покоління (1965-80 рр.)
В 1958 році була розроблена технологія інтегральних схем (Роберт Нойс, США), яка дозволила розміщувати в одному корпусі десятки і сотні транзисторів. Комп’ютери на таких схемах були меншого розміру, більш швидкі і коштували дешевше, ніж на транзисторах.
Стрімкий розвиток комп’ютерної техніки став можливим перш за все завдяки технологічним досягненням в галузі мікроелектронних технологій. В 1965 р. Гордон Мур, в майбутньому один із засновників фірми Intel, оприлюднив свій прогноз розвитку мікроелектроніки на майбутні 10 років: кількість елементів на кристалі буде збільшуватись вдвічі кожного року. Ця функціональна залежність одержала назву – «закон Мура»( Рис.11.2) . Цей закон не належить до числа «наукових» - математичних чи фізичних – законів, а являє собою вдало узагальненим досвідом шестирічного на той час випуску мікроелектронних елементів. Не зважаючи на свою емпіричність, закон Мура з деякими уточненнями заклав фундаментальний вектор розвитку чипів на 40 років, і технологи фірми Intel вважають, що він буде діяти щонайменше ще років десять.
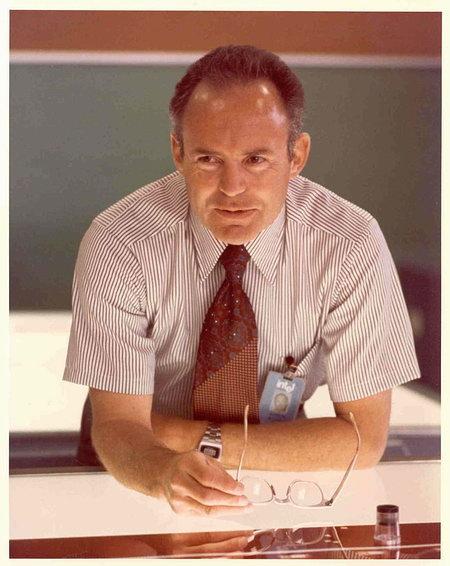
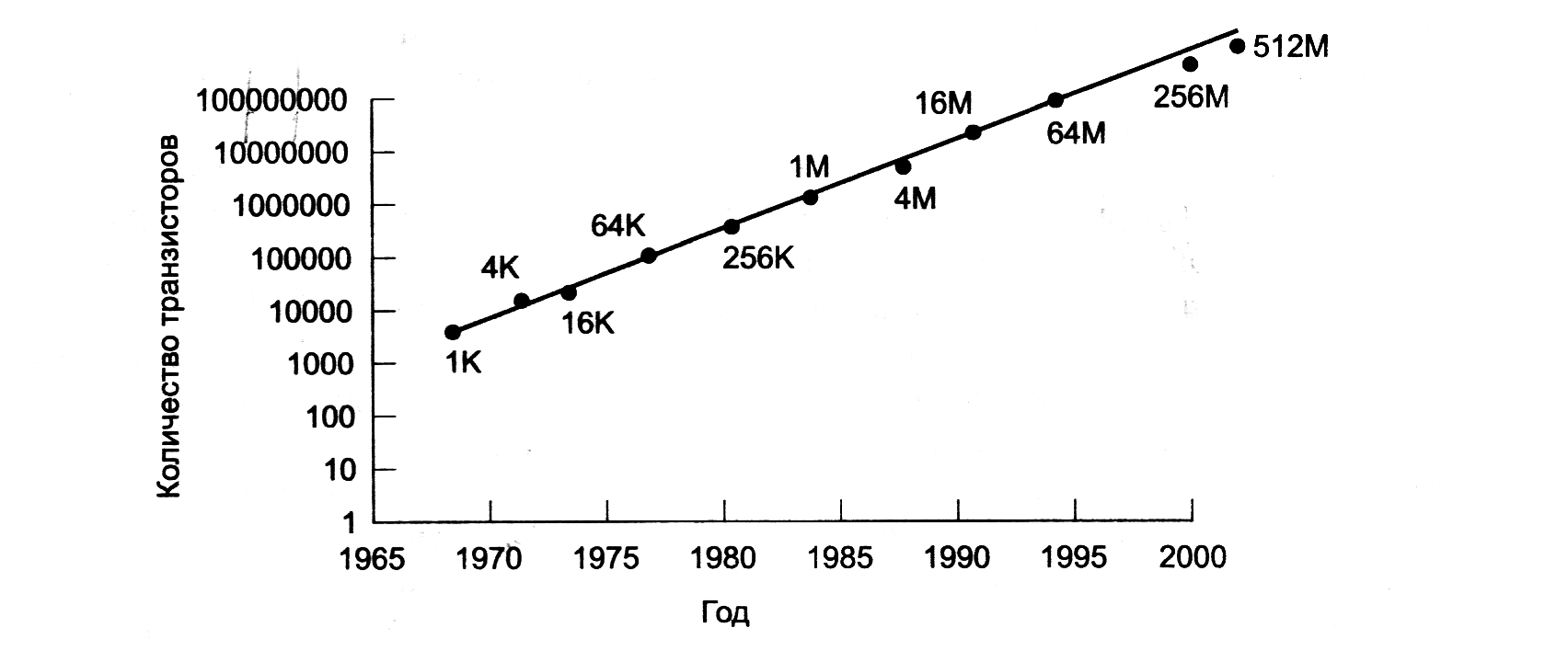
Рис. 11. Гордон Мур та його закон
Вражауючим є той факт, що на час публікації статті Мура найбільш складна інтегральна схема мала 64 транзистори, і його феноменальна прозорливість полягає якраз в тому, що на основі досить скромного досвіду, але глибокого розуміння перспектив технології, він спромігся сформулювати довготерміновий прогноз. Для ілюстрації – процесор Intel Itanium (Montecito), випущений в 2005 р., вміщує 1,7 мільярдів(!) транзисторів.
Ще одним вражаючим феноменом закону Мура є його універсальність, тобто не тільки відображення закономірностей мікроелектронних технологій, але придатність взагалі для широкого спектру сучасних високих технологій, де він також відображує тенденції експоненціального розвитку ряду явищ в сучасному суспільстві. Наприклад, зростання тактової частоти також відбувається за законом Мура ( Рис.11.3). Можна сказати, що закон Мура став синонімом технологічної революції наприклад в IT-індустрії, в конвергенції обчислювальних і комунікаційних можливостей і, навіть, в біології, медицині, оптиці, сільському господарстві. Взагалі, треба зауважити, що вся світова економіка, яку вже неможливо уявити без обчислювальної техніки, базується стрімкому розвитку напівпровідникової техніки і пов’язаних з нею IT-технологіях.
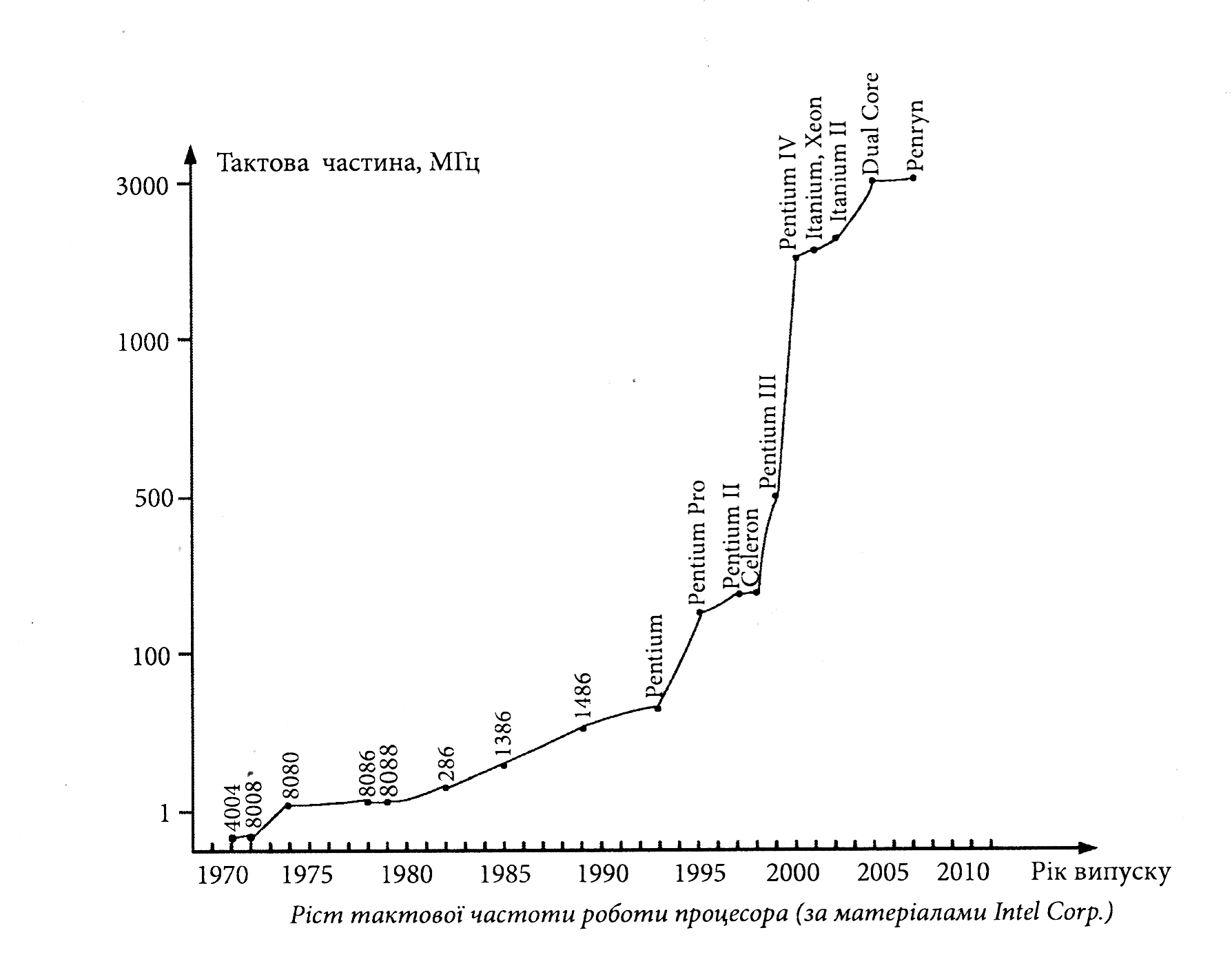
Рис.11.3
Найбільш яскравим представником машин третього покоління були так званні великі ЕОМ, або мейнфрейми, американської фірми IBM – IBM-360, 370. Геніальним творцем серії цих машин був Д. Амдал. В цих машинах вперше була реалізована ідея мультипрограмної роботи, тобто виконання паралельно багатьох
з
 адач.
адач.
Джин Амдал, IBM-360, 1964р
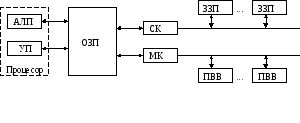
Рис. 114 Структура IBM- 360
АЛП – алфавітно-логічний пристрій
УП – управляючий пристрій
СК – селекторний канал
МК – мультіплексний канал
ЗЗП – зовнішні запам’ятовуючі пристрої
ПВВ – пристрої вводу-виводу
В архітектуру ЕОМ було введено два допоміжних процесора для керування периферійними пристроями – СК і МК. Ці процесори незалежно від центрального процесора могли з’єднуватися з периферійними пристроями і вводити або виводити з них інформацію в оперативну пам'ять. Центральний процесор використовував цю інформацію, отримуючи її вже з оперативної памьяти, не втрачаючи час на керування відносно низькошвидкісними периферійними пристроями. СК використовувався для зв’язку з більш-менш швидкими пристроями (магнітними дискетами і лентами) і водночас працював лише з одним з них (селекторний режим). МК обслуговував повільні пристрої (принтери, дисплеї, перфокарточні пристрої та інш.). Ці пристрої побайтно обмінювались з ОЗП інформацією, тобто працювали квазіпаралельно (мультиплексний режим). Введення периферійних процесорів (СК, МК) дозволило звільнити центральний процесор від рутиної роботи по обслуговуванню операцій вводу-виводу і дало йому змогу використовувати водночас декілька програм.
Цей новий режим роботи ЕОМ отримав назву мультипрограмної роботи. Суть його в наступному. Пам'ять машини (ОЗП) розбивається на декілька розділів, кожен з яких зберігає інформацію для певної задачі. Ця інформація там накопичується (вводиться чи виводиться через СК і МК) в залежності від просування задачі. Процесор по черзі звертається до розділів ОЗП і розв’язує поточну задачу поки йому вистачає інформації, накопиченої в ОЗП. Потім він перериває виконання задачі, запам’ятовує проміжні дані, на яких зупинилось виконання програми, і переходить до наступної задачі. Таким чином, процесор весь час працює на електронних швидкостях, максимально використовуючи свою потужність.
Багатозадачний режим між іншим передбачає одночасне обслуговування великої кількості користувачів. Так наприклад, машина IBM-360 була спроможна обслуговувати 256 терміналів (дисплеїв), які були підключені до мультиплексного каналу. За кожним терміналом сидів користувач зі своєю задачою. Потік звертань користувачів до машини був випадковий і треба було забезпечити таку швидкість реакції машини на звертання (реактивність системи), щоб користувач не відчував чергу на обслуговування. Для цього реакція на звертання повинна бути 0,3 – 0,5 сек.
В мультипрограмному режимі роботи виникло таке поняття, як „переривання програм” іншими програмами більш приоритетними. Особливе значення цей режим має в управляючих системах в тому числі системах, працюючих в реальному часі. В таких системах завжди є задачі, наприклад аварійні, які мають вищий пріоритет порівняно з рутинними задачами.
Одночасна обробка великої кількості задач потребувала дуже складної системи диспетчирування: розподілу пам'яті, організації паралельної роботи периферійних пристроїв, обробки сигналів переривання та ін. Ці функції невзмозі було передбачити окремому програмісту-користувачу, вона була покладена на вперше створену операційну систему – OS IBM. Це був грандіозній проект вартістю понад 5 млрд. доларів.
Фірма IBM поступово почала випускати декілька моделей машин під загальною назвою IBM-360. Ці моделі були архітектурно споріднені знину вверх. Тобто програмне забезпечення, розроблене для молодих моделей ішло на старших моделях, а навпаки – не завжди. Характеристики перших моделей IBM-360 наведено в таблиці.
Перші моделі серії IBM-360
|
Параметри |
Модель 30 |
Модель 40 |
Модель 50 |
Модель 60 |
|
Відносна продуктивність |
1 |
3,5 |
10 |
21 |
|
Тривалість циклу, нс |
1000 |
625 |
500 |
250 |
|
Об’єм пам'яті, Кбайт |
64 |
256 |
256 |
512 |
|
Розрядність пам'яті, байт |
1 |
2 |
4 |
16 |
Машини типу IBM-360 (та її продовження - IBM-370) належать до класу „великих машин”, або mainframe. Вони були сконструйовані в великих шафах (в людський зріст) і займали площу в декілька сот квадратних метрів.
В свій час архітектура цих машин де-факто стала світовим стандартом. Багато фірм різних країн розробляли технічні засоби та програмне забезпечення в стандартах IBM, в тому числі і організації Радянського Союзу. В СРСР в співпраці з країнами соцспівдружності була створена IBM-подібна система машин ЕС ЭВМ (единая система электронных машин).
Ще однією архітектурною лінією машин третього покоління можна вважати так звані „міні-ЕОМ”. Характерним представником таких машин була знана машини PDP-6,8,11 фірми DEC (Digital Equipment Corporation), які створив видатний винахідник і вчений К.Белл. Поява ціих машин поклала нову еру в електронному машинобудуванні- еру мікрокомп’ютерів.
Комп’ютери PDP-11 мали нову архітектуру, що базувалася на використані двунаправленої загальної шини (UNIBUS) (Рис.11.5). Ця архітектура в подальшому стала основою для персональних комп’ютерів.


Клод Белл та його машина PDP-6, 1964 р
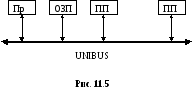
Пр – процесор
ОЗП – оперативний запам’ятовуючий пристрій
ПП – периферійні пристрої
Машина PDP-I1 мала 16-розрядну шину даних, її наступниця VAX-11 вже мала 32-розрядну шину. Ці машини користувались дуже великим попитом в 70-80 роках ХХ століття. В СРСР за архітектурою PDP-11 була створена система малих машин – СМ ЕВМ.
В Україні аналогами IBM-360 були машини М-4030 та СМ-4

Машина М 4030, 1973 р
Машина СМ-4, 1979 р

В період машин третього покоління з’явився також новий клас машин – супер-ЕОМ. В той час до таких машин відносили машини, які мали продуктивність в обробці операцій з плаваючою комою більше 10 MFLOPS (мегафлопс). В наші часи йдеться вже про GFLOPS (гігафлопс – 109) і TFLOPS (терафлопс - 1012).
Найбільш видатною машиною цього класу була машина Cray-1 (видатний конструктор – С.Крей), в склад якої входило 12 конвєєрних пристроїв, оперативна пам'ять мала 1 млн. 64 розрядних слів, тривалість циклу становила 50 нсек. Потім вже в 1985 р. була створена модель Cray-2, що мала продуктивність в 400 разів більшу ніж Cray-1. Головна особливість архітектури супер-ЕОМ – паралельна обробка інформації на багатьох одночасно працюючих процесорах.
В Радянському Союзі незалежно від закордонних розробок (відсутність інформації) також були створені супер-ЕОМ. Одною з них була М-10 (головний конструктор М.А.Карцев) та ПС-3000 ( Україна, головний конструктор В.В.Резанов). Вони незначно поступалися Cray-1 за продуктивністю з-за слабішої елементної бази, але мали цілу низку оригінальних архітектурних рішень, більш ефективних, ніж в Crey-1.


М.А. Карцев

В.В. Рєзанов та супер - ЕОМ ПС-3000