

МУ ОМ та буд.механіка для водних ресурсів 2012
.pdfМетодичні вказівки
NK = -(Q0K sin aK + H ×cos aK )
А. Зусилля M 5 , |
Q5 та N5 у 5-му перерізі, на відстані х = 2,5 м від лівої |
|||||||||||||||||||||||||||||
опори. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Значення балкових згинального моменту M 0 |
та перерізуючий сили |
Q0 |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
5 |
|
беремо з рис. 1.3в. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
y = |
2,5 |
×(15 - 2,5) × 2,5 = 3,888 м, |
tgα |
|
= |
|
4 × 2,5 |
× (15 - 2 × 2,5) = 0,4444 |
|
|||||||||||||||||||||
|
|
2 |
5 |
2 |
|
|
||||||||||||||||||||||||
5 |
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
||||
α5 ≈ 24O , |
sin α 5 = 0,407 ; |
cosα 5 |
= 0,914 . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
M 5 |
= M 50 - H × y5 = 666,666 - 200 × 3,888 = -110,9 |
|
kH м |
|
|
|||||||||||||||||||||||||
Q = Q0 cosα |
5 |
- H sinα |
5 |
= 136,7 ×0,914 - 200 ×0,407 = 43,0 kH , |
|
|
||||||||||||||||||||||||
5 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
N |
5 |
= -Q0 sinα |
5 |
- H cosα |
5 |
|
= -136,7 × 0,407 - 200 × 0,914 = -234,7 kH . |
|
|
|||||||||||||||||||||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Б. Зусилля M10 , |
Q10 та N10 |
у 10-му перерізі, на відстані х = 10 м від |
||||||||||||||||||||||||||||
лівої опори. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Значення балкових зусиль беремо з рис. 1.3в. |
|
|
|
|
||||||||||||||||||||||||||
y |
|
= |
2,5 |
× (15 -10) ×10 = 4,72 м, |
tgα = |
4×2,5 |
×(15- 2×10) = -0,222 |
|
||||||||||||||||||||||
|
|
|
2 |
|
|
|||||||||||||||||||||||||
10 |
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|||||
α10 ≈ 13O , |
sin α10 |
= -0,216 ; cosα10 = 0,976 . |
|
|
|
|
|
|
|
|
||||||||||||||||||||
M10 = M100 - H × y10 |
= 666,666 - 200 × 4,72 = -275,3 kH м |
|
|
|||||||||||||||||||||||||||
Q = Q0 cosα |
10 |
- H sin α |
10 |
= (-133,3) × 0,976 - 200 × (-0,216) = -88,2 |
kH , |
|
||||||||||||||||||||||||
10 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
N |
|
= -Q0 |
sinα |
10 |
- H cosα |
10 |
= -(-133,3) × (-0,216) - 200 × 0,976 = -222,0 |
kH . |
|
|||||||||||||||||||||
10 |
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
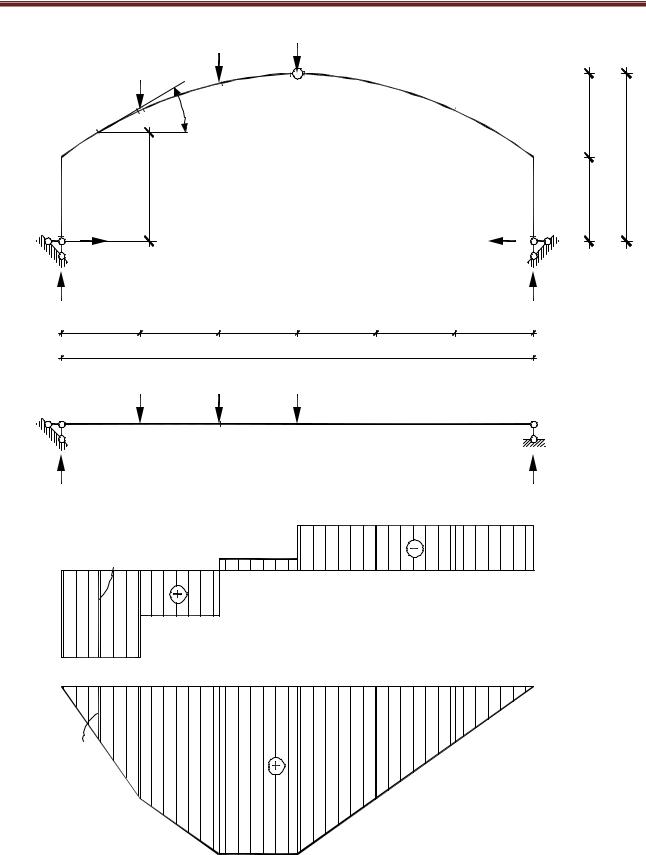
В якості ілюстрації розподілу внутрішніх зусиль в усіх перетинах заданої трьохшарнірної системи на рис. 1.4 приведені епюри M, Q, N .
Контрольні запитання
1.Дати визначення трьохшарнірної системи.
2.Яки особливості в трьохшарнірної системи Ви знаєте?
3.Як визначаються вертикальні реакції в трьохшарнірній системі?
4.Як визначаються горизонтальні реакції в трьохшарнірній системі?
5.В якому випадку горизонтальні реакції в трьохшарнірній системі дорівнюють друг другові?
6.Яка балка при розрахунку трьохшарнірної системи зветься еквівалентною?
7.Як обчисляється згинальний момент в перетинах трьохшарнірних систем?
8.Як обчислюються поперечні зусилля в перетинах трьохшарнірних систем?
9.Як обчислюються повздовжні зусилля в перетинах трьохшарнірних систем?
10.Поясніть термін - раціональна вісь трьохшарнірної системи.
~21 ~
|
|
|
|
|
|
Методичні вказівки |
|
|
|
||
а) |
|
|
|
140кН |
130кН |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
130кН |
|
|
8 C9 |
|
|
|
|
|||
|
|
|
|
6 7 |
10 |
|
|
|
|||
K |
4 5 |
?K |
|
|
|
|
11 |
|
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
3 |
|
|
|
|
|
|
|
|
|
12 |
=5м |
2 |
|
|
|
|
|
|
|
|
|
c=2,5м |
|
|
|
|
|
|
|
|
|
|
13 |
f |
|
|
|
|
yK |
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
b=2,5 |
|
|
1 H=200кН |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
H=200кН14 |
|
||||
A |
|
|
|
|
|
|
|
|
|
B |
|
V =266,7кН |
|
|
|
|
|
|
V =133,3кН |
||||
A |
|
|
|
|
|
|
|
|
|
B |
|
2,5м |
|
|
2,5м |
|
2,5м |
2,5м |
2,5м |
|
2,5м |
|
|
|
|
|
|
|
|
l=15м |
|
|
|
|
|
б) |
130кН |
140кН |
130кН |
|
|
|
|
||||
1, 2, 3 |
|
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12, 13, 14 |
|
A |
|
|
|
|
|
|
|
|
|
B |
|
V =266,7кН |
|
|
|
|
|
|
V =133,3кН |
||||
A |
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
133,3 |
|
|
|
в) |
Q0 |
|
|
|
|
3,3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
K |
|
|
|
|
|
|
|
|
Q0, кН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
136,7 |
|
|
|
|
|
|
|
266,7 |
|
|
|
|
|
|
|
|
M0, кНм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M0K |
|
|
|
|
|
|
|
|
333,3 |
|
|
|
666,7 |
|
|
|
|
|
666,7 |
|
|
|
|
|
|
|
|
1008 |
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.3 |
|
|
|
|
|
|
|
|
|
|
|
|
~ 22 ~ |
|
|
|
|

Методичні вказівки
500 |
108,5 |
|
68 |
||
|
500
M (кНм)
133,3
45,2 3,3 






 90,5
90,5
43,0
200

 159,4
159,4
130,9
Q (кН)
200
222,7 193,3 
 200
200 

286 234,7 

305,3
282,6
N (кН)
282,6
275,3 


 441,9
441,9
 500
500
500
88,2
40,0
200 
 14,6
14,6
200
222
233,3




 238,7
238,7 
 133,3
133,3



 133,3
133,3
Рис. 1.4
~ 23 ~

Методичні вказівки
РПР №3 ВИЗНАЧЕННЯ ПЕРЕМІЩЕНЬ В СТАТИЧНО ВИЗНАЧЕНИХ СИСТЕМАХ
Перед виконанням роботи студент зобов’язаний ознайомитися з відповідними розділами курсу рекомендованої літератури, розібрати приклади, відповісти на контрольні запитання:
∙Як визначаються переміщення за формулою Максвелла-Мора?;
∙Як формулюється правило Верещагіна?;
∙У яких випадках і як можливо його використовувати?
∙У яких випадках можливо використання формули трапеції?
∙У яких випадках можливо використання формули Сімпсона?
При побудуванні епюр згинальних моментів (одиничних та від навантаження) необхідно показати розрахунки.
Особливу увагу слід зазначити на побудування епюр згинальних моментів у рамах. Перед тим як будувати епюру (від навантаження або одиничну), необхідно скласти рівняння рівноваги, визначити опорні реакції (які у загальному випадку можуть мати горизонтальні та вертикальні складові) та скласти статичну перевірку результатів.
Складні епюри від заданого навантаження для «перемноження» на одиничні рекомендовано розкласти на частини, для визначення положення центра ваги та площі кожної з них. Можливо визначення переміщень окремо від сил P та рівномірно розподіленого навантаження q з наступним додаванням результатів.
Усі переміщення слід визначати за формулою Максвелла-Мора:
m l |
|
|
|
|
|
|
MiMP |
|
|||||
ij = ∑ ∫ |
dx , |
|||||
(EI) |
K |
|||||
K =1 0 |
|
|
|
|
||
m, t – число ділянок, де перемножуються епюри. |
||||||
Визначений інтеграл береться для окремих стержнів чи ділянок епюр, на яких функції, що перемножуються, не мають зломів, а жорсткості змінюються монотонно (чи постійні).
Обчислення переміщень зручно робити за допомогою правила Верещагіна (рис. А)
|
m ω |
y |
jK |
||
ij = |
∑ |
iK |
|
||
(EI)K |
|||||
|
K =1 |
||||
де ωiK – площа епюри M i на ділянці з номером k;
yiK – ордината прямолінійної епюри, яка береться під центром ваги даної ділянки «К» епюри Mi .
~ 24 ~

Методичні вказівки
ЕпюраMi |
|
|
|
|
ЕпюраMi |
|
|
ЕпюраMi |
|||||||||||||
|
ωik |
ц.в. |
|
|
a |
|
|
b |
a |
|
c |
|
|
b |
|||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ЕпюраMj |
|
|
|
|
|
ЕпюраMj |
|
|
ЕпюраMj |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
yjk |
|
|
a |
|
|
|
b |
|
a |
|
|
c |
|
|
|
b |
|
||
|
|||||||||||||||||||||
|
lk |
|
|
|
|
lk |
|
|
|
|
|
|
lk /2 |
lk /2 |
|
|
|
|
|||
|
Рис.А |
|
|
|
|
Рис.Б |
|
|
Рис. В |
||||||||||||
Якщо обидві епюри, що перемножуються, прямолінійні, то не має значення, в якій з них взята площа, а в якій – ордината.
Якщо обидві епюри, що перемножуються, розташовані по одну сторону від осі стержня, результат перемножування береться зі знаком «+», якщо по різні – зі знаком «-».
Якщо в межах ділянки «К» обидві епюри Mi і M j прямолінійні, то
відповідну складову переміщення можна обчислити за формулою трапецій
(рис. Б).
|
|
|
lK |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Dij = |
|
|
|
2 |
(a × a + b × b) + a × b + a × b |
|||||||||||||||||||
6(EI) |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Якщо одна з епюр має криволінійний обрис, то можна скористатися |
||||||||||||||||||||||||
формулою Сімпсона - Корноухова (рис. В) |
|
|
|
|
|
|
|
|
|
|||||||||||||||
D |
|
= |
|
lK |
|
|
a × |
|
+ 4c |
× |
|
+ b × |
|
|
||||||||||
|
|
|
|
|
|
b |
||||||||||||||||||
|
|
|
|
a |
c |
|||||||||||||||||||
|
6(EI) |
|
|
|||||||||||||||||||||
|
|
ij |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
||||||||
Приведені формули також придатні у випадку знакозмінних епюр, потрібно тільки кожну ординату підставляти в ці формули зі своїм знаком.
Переміщення в рамі остаточно повинні бути виражені через EIР або EIС, тому що жорсткості усіх стержнів рами (ригелів та стояків) неоднакові та задані тільки їх співвідношення.
~ 25 ~

Методичні вказівки
ЗАДАЧА 4. ЗНАХОДЖЕННЯ ПЕРЕМІЩЕНЬ У СТАТИЧНО ВИЗНАЧЕНОЇ ШАРНІРНО-КОНСОЛЬНІЙ БАЛЦІ.
I.Склад завдання
Для шарнірно-консольній балки з обраними по шифру розмірами та навантаженнями, треба знайти для вказаного перерізу «к» :
А) Лінійне переміщення – вертикальне переміщенняYк ; Б) Кутове переміщення – кут поворотуϕк .
II.Порядок виконання розрахунку
1.Установити ступень статичної визначеності заданої балки.
2.Побудувати поверхову схему балки.
3.Зробити розрахунок елементів поверхової схеми, побудувати епюру згинальних моментів M P від заданого навантаження. Виконати перевірку
рівноваги балки в цілому.
4. Зробити розрахунок елементів поверхової схеми, побудувати епюру згинальних моментів M1 від одиничної вертикальної сили Р = 1. Виконати перевірку рівноваги балки в цілому.
5.Перемноживши епюри M P та M1 знайти вертикальне переміщенняYк .
6.Зробити розрахунок елементів поверхової схеми, побудувати епюру згинальних моментів M2 від одиничного зосередженого моменту М = 1.
Виконати перевірку рівноваги балки в цілому.
7.Перемноживши епюри M P та M2 знайти кут поворотуϕк .
Приклад розрахунку.
Для заданої шарнірно-консольній балки (рис. 4.1а) постійної жорсткості треба знайти в перерізі «к» вертикальне переміщення Yк та кутове переміщення
– кут поворотуϕк .
1. Знайдемо ступень статичної визначеності заданої балки за допомогою
формули Чебишева
W = 3 × Д - 2 × Ш - С0 = 3 × 2 - 2 ×1 - 4 = 0 , W=0 свідчить про те, що балка є статично визначеною.
2. Будуємо поверхову схему (рис.4.1б). На першому етапі аналітичного розрахунку будемо розглядати допоміжну балку АС. На другому етапі аналітичного розрахунку розглянемо основну балку ВD (беремо до уваги як власне навантаження, так і вплив вище розташованої допоміжної балки).
~ 26 ~

Методичні вказівки
Рис.4.1
Частина А. Визначення вертикального переміщення.
Для визначення вертикального переміщення в перерізі «к» необхідно розглянути два стана системи: дійсний стан від заданого навантаження (рис. 4.1а) та допоміжний стан з прикладеною у напрямі переміщення, яке необхідно знайти, вертикальною одиничною силою Р1 = 1(рис. 4.2а).
3. Будуємо епюру згинальних моментів M P першого стану. Остаточна епюра згинальних моментів M P зображена на рис.4.1в (детальніше аналітичний розрахунок багато пролітної статично визначеної балки було розглянуто у РПР №1).
Перевірка рівноваги балки в цілому:
∑Y = VA +VB +VD - q1 × 2 - q1 ×6 - F1 - F2 =
= 16.67 + 42.78 + 70.56 -10 - 90 -10 - 20 = 0.
Похибка дорівнює нулю.
4. Будуємо епюру згинальних моментів M 1 другого стану (рис. 4.2б). Перевірка рівноваги балки в цілому:
∑ |
Y = V |
|
+V |
+ V |
− |
|
= 1.33 − 0.44 + 0.11 − 1 = 0. |
A |
P |
||||||
|
B |
D |
1 |
||||
Похибка дорівнює нулю.
~ 27 ~

Методичні вказівки
5. Оскільки необхідно знайти переміщення у балці – системі, яка працює на згин, від зовнішнього навантаження, використовуємо перший член формулі Максвелла-Мора, який враховує згинальні моменти:
t l |
|
D1P = ∑ ∫ М1М Р dx , |
|
k =1 0 |
EI |
где t – число ділянок, де перемножуються епюри.
Рис. 4.2
Використаємо правило Верещагіна, а також формули трапецій та формулу Сімпсона для обчислювання інтегралів (додаток 1). Для цього розіб’ємо балку на 5 ділянок (KA, AF,FB, BD, DE) на яких згинальні моменти, що перемножуються, не мають зломів.
|
5 |
1 |
l |
|
|
|
|
|
|
|
|
|
|||
|
1P = ∑ |
|
|
|
KA |
|
AF |
|
FB |
|
BD |
|
DE |
||
Y = |
M1M P dx = |
+ |
+ |
+ |
+ |
||||||||||
|
1P |
1P |
1P |
1P |
1P . |
||||||||||
EI |
|||||||||||||||
к |
k =1 |
∫0 |
|
|
|
|
|
|
|
|
|
||||
Жорсткість винесена з під знаку інтегралу у зв’язку з тім, що по умовам прикладу вона є постійною на усіх ділянках балки.
Площі та координати центра ваги різноманітних простих фігур (епюр) наведені у додатку 2.
Ділянка KA. Так як на цій ділянці епюри M P таM 1 мають простий вигляд, то
використовуємо правило Верещагіна: ω = 110 × 2 - площа криволінійної епюри
3
M P , яка має обрис квадратичної параболи; y = 3 2 - ордината з трикутної епюри
4
M 1 , яка береться під центром ваги площі ω1 криволінійної епюри M P :
~ 28 ~

Методичні вказівки
KA
1P
= ω × y EI = 10 EI .
Ділянки AF таFВ. Так як на цих ділянках прямолінійні епюри M P таM 1 мають складний вигляд, і потребують для подальшого використання правила Верещагіна розкладання на прости епюри (додаток 3) з метою визначення положення центра ваги та площі кожної з них, будемо використовувати формулу трапецій:
|
DAF = |
3 |
[2(10 × 2 -10 ×1) +10 ×1 -10 × 2] = |
5 |
; |
|
|
||
|
|
|
|||||||
|
|
1P |
6EI |
|
EI |
||||
|
|
|
|
|
|||||
DFB = |
5 |
|
[2(-10 ×1 - 6.67 × 0.67)+10 ×0.67 +1×6.67] = - |
12.96 |
. |
||||
|
|
|
|||||||
1P |
6EI |
|
|
|
|
EI |
|||
|
|
|
|
|
|||||
Ділянка BD. Так як на цій ділянці криволінійна епюра M P та прямолінійна епюраM 1 також мають складний вигляд, і потребують для подальшого використання правила Верещагіна розкладання на прости епюри, будемо використовувати формулу Сімпсона:
DBD1P |
= |
6 |
[- 6.67 × 0.67 + 4 × 44.18 × 0.33 + 0] = |
54.41 |
. |
6EI |
|
||||
|
|
|
EI |
||
Ділянка DЕ. Так як на цій ділянці епюриM 1 згинальні моменти дорівнюють «нулю», то згідно правила Верещагіна маємо: DD1PЕ = 0 .
Остаточно маємо вертикальне переміщення Yк :
Y = |
1 |
(10 + 5 -12.96 + 54.41+ 0) = |
56.45 |
(м). |
|
|
|||
к |
EI |
|
EI |
|
|
|
|||
Оскільки результат додатний, точка «К» переміститься в напрямі дії одиничної сили.
Частина Б. Визначення кутового переміщення.
6. Для визначення кутового переміщення в перерізі «к» необхідно розглянути допоміжний стан системи з прикладеним в перерізі «к» у довільному напрямі зосередженим одиничним моментом М1 = 1(рис.4.3а). Остаточна епюра згинальних моментів M 2 зображена на рис.4.3б.
Перевірка рівноваги балки в цілому:
∑Y = VA +VB + VD = -0.167 + 0.223 - 0.056 = 0.
Похибка дорівнює нулю.
7. Розіб’ємо балку на 5 ділянок (KA, AF, FB, BD, DE) на яких згинальні моменти M P та M 2 не мають зломів.
∑5 1 l
ϕк = D2 P = k =1 EI ∫0 M 2M P dx = DKA2 P + DAF2 P + DFB2 P + DBD2 P + DDE2P .
Ділянка KA. Так як на цій ділянці епюриM 2 згинальні моменти дорівнюють «нулю», то згідно правила Верещагіна маємо DKA2P = 0 .
Ділянки AF таFВ. Так як на цих ділянках прямолінійна епюра M P має складний вигляд, будемо використовувати формулу трапецій:
~ 29 ~

|
|
|
|
|
|
|
Методичні вказівки |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
DAF2 P |
= |
3 |
|
[2(10 × 0 -10 × 0.5) +10 × 0.5 -10 × 0] = - |
2.5 |
. |
|
|||
|
6EI |
|
|
||||||||
|
|
|
|
|
|
|
EI |
||||
DFB2P |
= |
5 |
|
[2(10 |
× 0.5 + 6.67 × 0.34)-10 ×0.34 - 0.5 ×6.67] = + |
6.48 |
. |
||||
|
|
|
|||||||||
|
|
6EI |
|
|
|
|
EI |
||||
Ділянка BD. Так як на цій ділянці криволінійна епюра M P та прямолінійна епюраM 2 мають складний вигляд, будемо використовувати формулу Сімпсона:
DBD2P |
= |
6 |
[6.67 × 0.34 - 4 × 44.18 ×0.17 + 0]= - |
27.2 |
. |
6EI |
|
||||
|
|
|
EI |
||
Рис.4.3
Ділянка DЕ. Так як на цій ділянці епюриM 2 згинальні моменти дорівнюють «нулю», то згідно правила Верещагіна отримуємоDD2ЕP = 0 .
Остаточно маємо кутове переміщення – кут повороту ϕк :
ϕк |
= |
1 |
(0 - 2.5 + 6.48 - 27.2 + 0) = - |
23.22 |
(рад). |
EI |
|
||||
|
|
|
EI |
||
Від’ємне значення кута повороту перерізу «К» свідчить про те, що переріз повертається не в напрямі зосередженого одиничного моменту, а в протилежному напрямі, тобто проти ходу годинникової стрілки.
~ 30 ~