

2. Определение момента инерции маховика по заданному коэффициенту неравномерности движения
2.1 Исходные данные
Ход ползуна Е НЕ = 60мм
Расстояние между стойками L = 150мм
Длина коромысла и шатуна lCD = lCE = 170 мм
Коэффициент средней скорости К = 1,2
Координаты центров масс звеньев 3 и 4
lDS4 = 0,4lDC (2.1)
lcs5 = 0,3lCE (2.2)
Массы звеньев механизма
m4 = 100кг, m5 = 95кг, m6 = 200кг
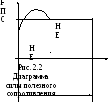
Сила полезного сопротивления
FПС = 25 кН = 25000 Н
Моменты инерции звеньев
Is4 = 29102кгм2
Is5 = 28102кгм2
Угол крайнего правого положения
звена 4 = 6º
Коэффициент неравномерности движения
=0,05
Частота вращения кривошипа
n1 = 75 мин-1
Синхронная частота вращения электродвигателя
nС = 1500 мин-1
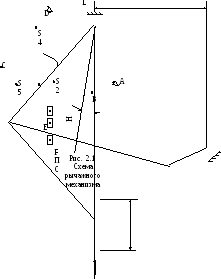
 2.2
Синтез кинематической схемы рычажного
механизма
2.2
Синтез кинематической схемы рычажного
механизма
Принимаем масштаб построения М 1:1 и строим крайние положения звена 3 определяемые углом = 6º и ходом ползуна Е ( НЕ = 60 мм ), см. рис. 2.3
Соединяем точки СН и СК отрезком. Определяем угол по формуле
 (2.3)
(2.3)
От отрезка ( СНСК ) в точке СН отстраиваем луч под углом
90 = 90º 16º = 74º
В равнобедренном треугольнике СНDСК проводим медиану из вершины D и продолжаем её до пересечения с лучом в точке О.
На расстоянии L = 150 мм от точки D проводим вертикаль. Из точки СН проводим дугу с центром в точке О до пересечения её с вертикалью в точке А.
Измерением находим отрезки ( учитывая масштаб построения )
АСН= 277 мм
АСК= 227 мм
Из системы уравнений

Находим длины звеньев

ВС = АСК + АВ = 227 + 25 = 252мм (2.7)
Определяем положения центров тяжести звеньев 3 и 4 по зависимостям (2.1) и (2.2)
lDS4 = 0,4lDC = 0,4170 = 68 мм
lcs5 = 0,3lCE = 0,3130 = 51 мм
 2.3
Построение плана положений механизма
2.3
Построение плана положений механизма
Методом засечек строим план механизма в 6-ти положениях, соответствующих 6 равноотстоящим положениям кривошипа. Принимаем длину кривошипа на чертеже (АВ) = 25 мм и определяем масштабный коэффициент плана положений
 (2.8)
(2.8)
2.4 Построение планов скоростей
Определяем угловую скорость кривошипа
 (2.9)
(2.9)
Скорость точки В:
 (2.10)
(2.10)
Принимаем длину вектора, изображающего скорость точки В на планах скоростей (рvв) = 100 мм и определяем масштабный коэффициент планов скоростей
 (2.11)
(2.11)
Скорость точки С определяется системой векторных уравнений


Скорость точки Е определяется векторным уравнением
 (2.14)
(2.14)
По записанным векторным уравнениям строим планы скоростей механизма.
 Описание
построения планов скоростей.
Описание
построения планов скоростей.
От произвольно выбранной точки pv – полюса плана скоростей отстраиваем вектор ( pvв ) длиной 100 мм перпендикулярно звену АВ. Через точку в проводим прямую перпендикулярно звену ВС, а через полюс pv проводим прямую перпендикулярно звену DC и на пересечении этих двух прямых получаем точку c. Через полюс pv проводим вертикальную прямую – параллельно направляющей ползуна E, а через точку С проводим прямую перпендикулярную звену CE, и на пересечении этих двух прямых получаем точку e. Это построение выполняем 6 раз для всех расчётных положений механизма.
Из построенных планов скоростей определяем скорости точек и угловые скорости звеньев механизма по формулам:



Для всех положений
VВ=0,2м/с
(рvв) = 100 мм LDC= 0,17м
 LЕC=
0,17м
LЕC=
0,17м
 Положение
№ 1
Положение
№ 1
VЕС = (ес)·v = 0·0,002 = 0м/с
VС
= (pvс)·v
= 0·0,002 = 0м/с 
VS4 = (pvs4)·v = 0·0,002 = 0м/с
VS5
= (pvs5)·v
= 0·0,002
= 0м/с 
VЕ = VS6 = (pvе)·v = 0·0,002 = 0м/с
Положение №2
VЕС = (ес)·v = 203·0,002 = 0,406м/с
VС
= (pvс)·v
= 203·0,002 = 0,406м/с 
VS4 = (pvs4)·v = 81·0,002 = 0,162м/с
VS5
= (pvs5)·v
= 170·0,002
= 0,34м/с

VЕ = VS6 = (pvе)·v = 170·0,002 = 0,34м/с
Положение №3
VЕС = (ес)·v = 114·0,002 = 0,228м/с
VС
= (pvс)·v
= 114·0,002 = 0,228м/с 
VS4 = (pvs4)·v = 46·0,002 = 0,092м/с
VS5
= (pvs5)·v
= 82·0,002
= 0,164м/с

VЕ = VS6 = (pvе)·v = 36·0,002 = 0,072м/с
 Положение
№4
Положение
№4
VЕС = (ес)·v = 37·0,002 = 0,074м/с
VС
= (pvс)·v
= 37·0,002 = 0,074м/с 
VS4 = (pvs4)·v = 15·0,002 = 0,03м/с
VS5
= (pvs5)·v
= 26·0,002
= 0,052м/с 
VЕ = VS6 = (pvе)·v = 8·0,002 = 0,016м/с
Положение №5
VЕС = (ес)·v = 134·0,002 = 0,268м/с
VС
= (pvс)·v
= 134·0,002 = 0,268м/с 
VS4 = (pvs4)·v = 54·0,002 = 0,108м/с
VS5
= (pvs5)·v
= 100·0,002
= 0,2м/с 
VЕ = VS6 = (pvе)·v = 65·0,002 = 0,13м/с
Положение №6
VЕС = (ес)·v = 146·0,002 = 0,292м/с
VС
= (pvс)·v
= 146·0,002 = 0,292м/с 
VS4 = (pvs4)·v = 58·0,002 = 0,116м/с
VS5
= (pvs5)·v
= 126·0,002
= 0,252м/с 
VЕ = VS6 = (pvе)·v = 134·0,002 = 0,268м/с
Результаты всех этих расчётов представляем в таблице 2.1
 Таблица
2.1
Таблица
2.1
Длины векторов планов скоростей, скорости точек и угловые скорости звеньев механизма
|
№ пол. |
VB |
(pvc) |
VC |
(ec) |
VEC |
(pvs4) |
VS4 |
(pvS5) |
VS5 |
(pve) |
VE= VS6 |
4 |
5 |
|
|
|
мм |
м/с |
мм |
м/с |
мм |
м/с |
мм |
м/с |
мм |
м/с |
С-1 | |
|
1 |
|
0 |
0,0 |
0 |
0,0 |
0 |
0,0 |
0 |
0,0 |
0 |
0,0 |
0,0 |
0,0 |
|
2 |
100 мм |
203 |
0,406 |
203 |
0,406 |
81 |
0,162 |
170 |
0,34 |
170 |
0,34 |
2,3882 |
2,3882 |
|
3 |
( pvв ) = |
114 |
0,228 |
114 |
0,228 |
46 |
0,092 |
82 |
0,164 |
36 |
0,072 |
1,3412 |
1,3412 |
|
4 |
|
37 |
0,074 |
37 |
0,074 |
15 |
0,03 |
26 |
0,052 |
8 |
0,016 |
0,4353 |
0,4353 |
|
5 |
0,2 м/с |
134 |
0,268 |
134 |
0,268 |
54 |
0,108 |
100 |
0,2 |
65 |
0,13 |
1,5765 |
1,5765 |
|
6 |
VB = |
146 |
0,292 |
146 |
0,292 |
58 |
0,116 |
126 |
0,252 |
134 |
0,268 |
1,7176 |
1,7176 |
 Чтобы
определить значения приведённого
момента сил сопротивления и сил тяжести
нам необходимо определить силы тяжести
звеньев, и силу полезного сопротивления.
Чтобы
определить значения приведённого
момента сил сопротивления и сил тяжести
нам необходимо определить силы тяжести
звеньев, и силу полезного сопротивления.
2.5 Силы тяжести звеньев определим по формуле
 (2.22)
(2.22)
где mi – масса соответствующего звена, кг. (см. п. 2.1 )
g = 9,81 ≈ 10 м/с2 – ускорение свободного падения.
|
G2 = ∙ 10 = H |
G5 = 95 ∙ 10 = 950 H |
|
G4 = 100 ∙ 10 = 1000 H |
G6 = 200 ∙ 10 = 2000 H |