

2. Система статичного регулювання.
Розглянемо систему автоматичного регулювання тиску стиснутого повітря в резервуарі (рис. 2.26). Регульованою (вихідною) величиною буде тиск стиснутого повітря в резервуарі (ресивері), яке надходить від компресора через регулювальний орган (клапан). Вхідними величинами будуть прохідний переріз або положення штока регулювального органа, а також навантаження об'єкта — кількість працюючих ліній.
Як було показано в п. 2.2.3, цей регульований об'єкт з клапаном є аперіодичною ланкою. Манометрична пружина описується рівнянням коливальної ланки, важільний підсилювач - підсилювальної, гідравлічний циліндр з пружиною і підсилювачем типу сопло-заслінка - аперіодичної ланки. Замінивши конструктивні елементи переліченими ланками, дістанемо структурну схему системи автоматичного регулювання (рис. 2.29), за якою, використовуючи залежності (2.75) і (2.77) про передаточні функції послідовного з'єднання елементів і при замиканні зворотного зв'язку, можна знайти передаточну функцію замкнутої системи автоматичного регулювання.

Ланки
з передаточними функціями![]() увімкнуті
увімкнуті
послідовно, тому передаточна функція гюзімкнутої системи

Передаточна функція кола зворотного зв'язку
![]()
Відповідно до залежності (2.77) і введених позначень


Звідси, - диференціальне рівняння системи автоматичного регулювання
![]()
Здійснивши зворотний перехід, дістанемо диференціальне рівняння системи

В![]() усталеному режимі похідні всіх порядків
дорівнюють нулю, і рівняння(2.96)
набере вигляду:
усталеному режимі похідні всіх порядків
дорівнюють нулю, і рівняння(2.96)
набере вигляду:
звідки
![]()
Із рівняння (2.98) видно, що розглядувана система в усталеному режимі характеризується цілком певною залежністю вихідної величини від вхідної і, отже, має статичну характеристику. Вони можуть бути в рівновазі при різних, відмінних від заданого, значеннях регульованої величини. Причому кожному значенню вхідної величини відповідає певне значення вихідної величини. Задане значення вихідної (регульованої) величини буде тільки при розрахунковому значенні вхідної величини, наприклад при двох працюючих споживачах. Якщо працює одна або всі три лінії, регульована величина відхилиться від заданого значення, тобто в системі в усталеному режимі виникне неусувна похибка, яка називається статичною помилкою. Величина похибки при максимальному відхиленніне повинна
перевищувати
± (3...5) %.![]()
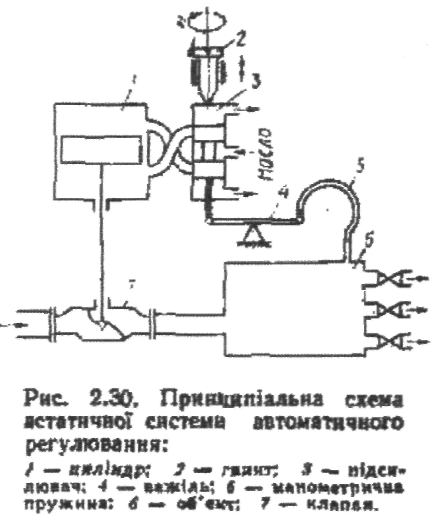
3. Система астатичного регулювання.
У розглянутій вище системі автоматичного регулювання тиску стиснутого повітря в резервуарі гідравлічний виконавчий механізм з пружиною замінимо виконавчим механізмом двосторонньої дії, а підсилювач типу сопло-заслінка -підсилювачем із золотником (рис. 2.30). Задавальне діяння будемо вводити за допомогою мікрометречного гвинта, який переміщує гільзу підсилювача. Лімб мікрометричного гвинта протарований в одиницях тиску.
При такій заміні кількість елементів у принципіальній схемі і дія системи не змінились. З підвищенням тиску в об'єкті манометрична пружина переміщує важіль і плунжер підсилювача вниз, відкриваючи нижнє вікно гільзи підсилювача. Масло
від
джерела надходить у верхню порожнину
циліндра виконавчого механізму, і
поршень
із штоком, перемішуючись униз, зменшує
переріз клапана, а отже, й приплив
повітря в об'єкт. Плунжер і шток
переміщуватимуться до встановлення
заданого значення тиску в регульованому
об'єкті. При зміні регульованого тиску
мікрометричним гвинтом змінюють
положення гільзи підсилювача. У цьому
разі відкривається
одне з вікон гільзи, і масло проходить
у нижню або верхню порожнину циліндра,
змінюючи переріз клапана до встановлення
заданого значення
тиску в резервуарі. У структурній схемі
системи (рис. 2.29) стануться зміни
~ замість передаточної функції![]() і
треба вписати передаточну
і
треба вписати передаточну
функцію
![]() оскільки
застосований виконавчий механізм є
оскільки
застосований виконавчий механізм є
ідеальною інтегруючою ланкою.
З урахуванням змін передаточна функція розімкнутої системи
![]()
Передаточна функція замкнутої системи

Із виразу (2.100) дістанемо рівняння системи автоматичного регулювання
![]()
Диференціальне рівняння системи дістанемо, здійснивши зворотний перехід,
![]()
Оскільки в усталеному режимі похідні всіх порядків дорівнюють нулю, із виразу (2.102) дістанемо:
або![]()
У розглянутій системі немає зв'язку між вихідною І вхідною величинами в усталеному режимі, тому на відміну від статичної системи вона називається астатичною. Астатичні системи здійснюють регулювання без статичної помилки при будь-яких сталих збурюючих діяннях.
4. Рівняння динаміки лінійних систем автоматичного регулювання.
Рівняння (2.95) і (2.101) добуті для конкретного випадку статичної й астатичної систем четвертого порядку. Відповідно для лінійної статичної й астатичної систем n-го порядку в загальному вигляді можна
написати рівняння;
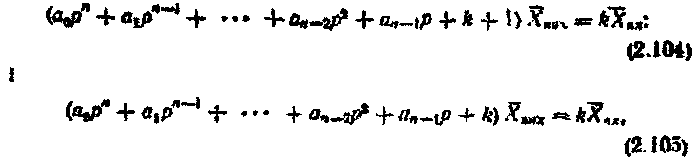
де k - коефіцієнт підсилення розімкнутої системи.
Якщо ліві частини рівнянь (2.104) і (2.105) прирівняти до нуля, дістанемо рівняння, які називаються характеристичними.

Вони описують поведінку систем автоматичного регулювання в режимі вільних коливань, що характеризується відсутністю будь-яких діянь. Коефіцієнти характеристичного рівняння залежать тільки від значень, окремих параметрів динамічних ланок системи, і при їх сталості вони незмінні. Ці коефіцієнти визначають основні властивості конкретної системи.
Характеристичні рівняння систем звичайно записують у вигляді
![]()
де![]() —
вільний член;
—
вільний член;![]() -
для статичних і
-
для статичних і![]() -для
астатичних систем.
-для
астатичних систем.
Праві частини рівнянь (2.104) і (2.105) відображують вплив на систему вхідної величини. Як видно з рівнянь, діяння вхідної величини на систему також визначається її параметрами.
Порівнюючи рівняння (2.104) і (2.105), неважко побачити, що в лівій частині рівняння астатичної системи немає вільної одиниці. Ця відмінність мас принципове значення при роботі астатичних систем автоматичного регулювання в усталеному режимі.
4 години