5.7 Интеграл дюамеля
Интеграл Дюамеля используется для определения выхода объекта у(t) при произвольном входом сигнале x(t) и известных h(t) либо w(t). Предполагается, что на вход объекта, описываемого весовой функцией w(t), подается сигнал x(t)
(рис.
3.12, а), подробное описание которого дано
в п. 2.8.Если реакцию объекта на
![]() обозначить через
обозначить через![]() (весовая функция), а реакцию на
(весовая функция), а реакцию на![]() −
−![]() (приближенная весовая функция), то на
основании принципа суперпозиции можно
записать выходной сигнал на импульс
(приближенная весовая функция), то на
основании принципа суперпозиции можно
записать выходной сигнал на импульс![]()


Рис. 5.12 Представление входного (а) и выходного сигналов (б)
Замена
входного сигнала x(t) набором импульсов,
высота которых совпадает с соответствующими
координатами
(рис. 5.12),
позволяет записать реакцию на ступенчатую
функцию
![]() на
основании принципа суперпозиции
на
основании принципа суперпозиции


Последнее
уравнение называется интегралом Дюамеля
(уравнением свертки), отражающим свіязь
между
входом, выходом объекта и его весовой
функцией.
По
сути дела весовая функция является
памятью объекта, которая показывает,
как долго и как сильно влияет на объект
импульсное возмущение, поданное на его
вход в момент времени τ = 0.
Из
физического смысла весовой функции
верхний предел интегрирования может
быть заменен на t,так как невозможно
представить реальную систему, в которой
на выходную координату в настояний
момент
времени оказывают влияние возмущения,
которые появляются в последующие моменты
времени.Если произвести замену в формуле
(13) ξ = τ = t ,
![]() , то можно записать симметричную формулу
(14)
, то можно записать симметричную формулу
(14)
 (14)
(14)
Если для представления входного сигнала использовать не формулу (2.26), а (2.27), то интеграл Дюамеля записывается через переходную функцию:

(15)
Или

5.8 Преобразование лапласа
Основным математическим аппаратом, который используется в теории автоматического управления,является специальный метод прикладного анализа, так называемый операционный метод, в основе которого лежит функциональное преобразование Лапласа.
5.8.1 Определение преобразования Лапласа
Преобразованием Лапласа называется преобразование функции x(t) переменной t в функцию х(s) другой переменной s при помощи оператора, определяемого соотношением
 (16)
(16)
где x(t) – оригинал функции; x(s) – изображение по Лапласу функции x(t); s – комплексная переменная s = α + i ω .
Формула (16) определяет прямое преобразование Лапласа. Возможно и так называемое обратное преобразование Лапласа, позволяющее по изображению найти оригинал. Оно определяется соотношением
 (17)
(17)
где с – абсцисса сходимости функции x(s).
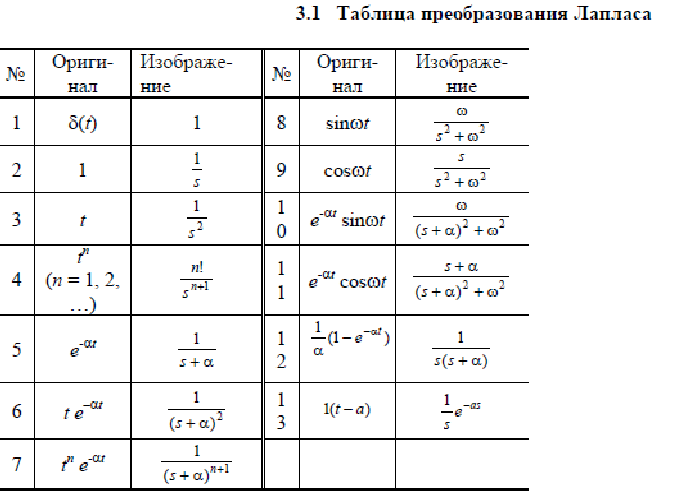
Для большинства функций, встречающихся на практике, составлены таблицы соответствия между оригиналами и изображениями. Изображения некоторых наиболее часто встречающихся функций в теории управления приведены в табл. 5.1. Если же функция отсутствует в таблице, то ее изображение можно получить непосредственно, пользуясь соотношением (16).
Пример
5.1
Требуется найти преобразование Лапласа
от функции
![]() .
.
Согласно определению преобразования Лапласа (16) имеем

Таким образом,

Широкое применение преобразования Лапласа обусловлено тем, что изображение некоторых функций оказывается проще их оригиналов и ряд операций, таких как интегрирование, дифференцирование над изображениями проще, чем соответствующие операции над оригиналами.