

ЛЕКЦИЯ_12. Сравнительная характеристика динамических свойств систем с различными наблюдателями
Содержание
Исходными данными при синтезе систем с модальным регулятором является расположение корней характеристических уравнений системы и наблюдателя. Хотя между качестом переходых процессов и располложением корней имеется связь, но она в некоторой степени носит качественный характер и поэтому требует проверки, чтобы убедиться о выполнении системой предявленных к ней требований. Поэтому результаты исследования математической модели с наблюдателем носят предварительный характер. Это связано еще и с тем, что управление системой осуществляется не на основе измеренных переменных состояния, а на основе вычисленных переменных. Если вычисления организованы недостаточно корректно, то истинные значения переменных состояния могут отличаться от вычисленных. Так как качественные показатели системы определяются, в основном, качеством обратных связей, то внедрение систем с наблюдателями требует более тщательных натурных испытаний.
Кроме того, при вводе в систему наблюдателя уменьшается запас по фазе, что увеличивает перерегулирование, хотя требуемое расположение корней должно бы дать удовлетворительный переходной процесс. Поэтому натурным испытаниям системы должно предшествовать моделирование при разных начальных условиях объекта и наблюдателя с целью оценки величины перерегулирования.
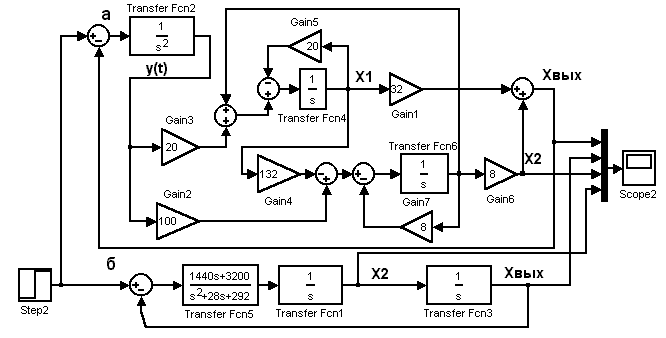
Рис.3.17.Структурная схема системы (а – наблюдатель полного порядка, б – с передаточной функцией регулятора – наблюдателя).
На рис.3.17 представлены структурные схемы исследуемой системы с наблюдателем полного порядка. Причем, на рис.3.17,а наблюдатель полного порядка синтезирован по уравнениям примера 3.9
 ,
,
 .
.
а на рис.3.17,б наблюдатель полного порядка представлен передаточной функцией регулятора-наблюдателя
 .
.
Эти две структуры системы регулирования
промоделированы в Simulink.
НаScope2 приведены переходные
процессы систем по выходным координатам
систем, представленных разными
структурами, и выходной координате .
(Рис.3.18).
.
(Рис.3.18).
Полное совпадение переходных процессов
по выходным координатам (кривая 1 Scope2) соответствует идентичности моделей
рис.3.17,а и рис.3.17,б. В то же время по
промежуточной переменной (для данного примера это ток двигателя)
переходные процессы имеют разный вид.
Для структурной схемы рис.3.17,б (кривая
2а) переходной процесс соответствует
процессу в физической системе: в процессе
разгона двигателя наблюдается всплеск
тока, а затем ток становится равным
нулю, так как в установившемся режиме
(для данного примера это ток двигателя)
переходные процессы имеют разный вид.
Для структурной схемы рис.3.17,б (кривая
2а) переходной процесс соответствует
процессу в физической системе: в процессе
разгона двигателя наблюдается всплеск
тока, а затем ток становится равным
нулю, так как в установившемся режиме .
В модели наблюдателя (кривая 2б) такая
физическая аналогия отсутствует.
.
В модели наблюдателя (кривая 2б) такая
физическая аналогия отсутствует.
Следует отменить значительное
перерегулирование (больше 40%), хотя по
желаемому расположению корней системы
( )
и желаемому расположению корней
наблюдателя (
)
и желаемому расположению корней
наблюдателя ( )
перерегулирование должно быть значительно
меньше.
)
перерегулирование должно быть значительно
меньше.

Рис.3.18. Результаты моделирования структурных схем с наблюдателями полного порядка (1- переходные процессы по выходным координатам систем, 2а,2б – промежуточной координате X2).
На рис.3.19 представлены структурные схемы систем с наблюдателем пониженного порядка. На рис.3.19,а наблюдатель пониженного порядка синтезирован по уравнениям из примера 3.10
 (3-72)
(3-72)

Рис.3.19. Структурные схемы систем (а-с наблюдателем пониженного порядка, б-с передаточной функцией регулятора – наблюдателя).

Рис.3.20. Результаты моделирования структурных схем с наблюдателями пониженного порядка (1а,1б- переходные процессы по выходным координатам систем, 2а,2б – промежуточной координате X2).
На рис.3.18,б наблюдатель пониженного порядка представлен передаточной функцией регулятора-наблюдателя
 .
.
Результаты моделирования показывают,
что, хотя объект регулирования не
изменился, и требования к системе
регулирования сохранились (корни
характеристического уравнения системы
и наблюдателя одинаковы для схем,
представленных на рис.3.17 и рис.3.19),
величина перерегулирования в схеме с
наблюдателем пониженного порядка
уменьшилась на 10%, по сравнению с
регулятором полного порядка. Относительно
координаты
 остаются те же комментарии, которые
были у систем с наблюдателем полного
порядка: для структуры 3.19,б переходной
процесс в модели соответствует физическому
аналогу (кривая 2б), для структуры 3.19,а
переходной процесс в модели не
соответствует физическому аналогу
(кривая 2а).
остаются те же комментарии, которые
были у систем с наблюдателем полного
порядка: для структуры 3.19,б переходной
процесс в модели соответствует физическому
аналогу (кривая 2б), для структуры 3.19,а
переходной процесс в модели не
соответствует физическому аналогу
(кривая 2а).