

11.2. Управляемость и наблюдаемость
Понятие управляемости связано, при
подаче непрерывного управляющего
воздействия
 ,
с переводом систем из некоторого
начального состояния
,
с переводом систем из некоторого
начального состояния в конечное состояние
в конечное состояние за конечное время.
за конечное время.
Понятие наблюдаемости связано с оценкой
состояния системы в момент времени
 по известным входным
по известным входным и выходным
и выходным воздействиям, приложенным к системе
(
воздействиям, приложенным к системе
( ).
).
Это первые вопросы, которые следует рассмотреть при проектировании систем, и при их положительных решениях можно приступать к дальнейшим исследованиям. В данном изложении вопросы наблюдаемости и управляемости рассматриваются после исследования систем регулирования.
Отход от общепринятых методик изложения материала объясняется тем, что условия управляемости и наблюдаемости в традиционных учебных курсах вводятся без доказательства, а в данном изложении понятие управляемости и наблюдаемости получено как следствие применения формулы Аккермана.
Управлять системой – это иметь возможность получить заданный переходной процесс, т.е. синтезировать систему на основе требуемого размещения полюсов. Поэтому можно утверждать, что система управляема, когда удается разместить полюсы в заданных точках, т.е. выполнить преобразование матриц по формулам Аккермана
 .
.
Матрица
 определена тогда, когда матрица
определена тогда, когда матрица имеет себе обратную, что достигается
при выполнении одного из условий:
имеет себе обратную, что достигается
при выполнении одного из условий:
- определитель этой матрицы не равен нулю;
- ранг этой матрицы должен быть равенn(n- степень характеристического уравнения системы).
MatLabимеет команды, которые определяют ранг матрицы и раскрывают определитель.
Наблюдать систему – это иметь возможность синтезировать наблюдатель на основе размещения полюсов. Поэтому можно утверждать, что система наблюдаема, когда удается разместить полюсы в заданных точках, т.е. выполнить преобразования Аккермана
 .
.
Матрица
 будет определена только тогда, когда
матрица
будет определена только тогда, когда
матрица

имеет обратную, т.е. её ранг равен
 или её определитель не равен нулю.
или её определитель не равен нулю.
Если матрица
 не существует, то объект не управляем,
и полюсы замкнутой системы не могут
быть размещены в заданных точках. Если
матрица
не существует, то объект не управляем,
и полюсы замкнутой системы не могут
быть размещены в заданных точках. Если
матрица не существует, то объект не наблюдаем,
и нельзя синтезировать наблюдатель,
который оценивал бы все переменные
состояния объекта.
не существует, то объект не наблюдаем,
и нельзя синтезировать наблюдатель,
который оценивал бы все переменные
состояния объекта.
Рассмотрим понятия управляемости с позиций классической теории автоматического управления на примере структурной схемы, изображенной на рис.11.5.
Заметим, что полюс датчика совпадает с нулем объекта. Характеристическое уравнение системы имеет вид:

 (11.24.)
(11.24.)
или
 .(11.25.)
.(11.25.)
Чтобы представить характеристическое уравнение в виде полинома, умножим (11.25.) на знаменатель дроби:
 ,
,
или
 .
(11.26.)
.
(11.26.)
Однако, если в (11.25.) сократить члены
 перед умножением выражения на знаменатель,
то характеристическое уравнение примет
вид второго сомножителя в (11.26.)
перед умножением выражения на знаменатель,
то характеристическое уравнение примет
вид второго сомножителя в (11.26.)
 .
(11.27.)
.
(11.27.)
Следовательно, мы получили два разных характеристических уравнения, (11.26.) и (11.27.), для одной и той же системы.
Для выражения (11.26.) переходной процесс,
определяемый общим решением однородного
линейного уравнения, имеет составляющую
 ,
а в выражении (11.27.) эта составляющая
отсутствует. Поэтому на эту составляющую
нельзя воздействовать входным сигналом
и с помощью регулятора не удается
сдвинуть данный корень характеристического
уравнения в заданную точку. Это
свидетельствует о том, что данная система
по этой координате неуправляема.
,
а в выражении (11.27.) эта составляющая
отсутствует. Поэтому на эту составляющую
нельзя воздействовать входным сигналом
и с помощью регулятора не удается
сдвинуть данный корень характеристического
уравнения в заданную точку. Это
свидетельствует о том, что данная система
по этой координате неуправляема.
Пример 11.5.
Предположим, имеется система, заданная уравнениями пространства состояния
 .
.
Сначала произведем анализ управляемости:

и
 .
.
Таким образом, получим
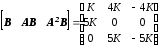 .
.
Поскольку третий столбец этой матрицы равен второму столбцу с точностью до знака, то определитель матрицы равен нулю и, следовательно, обратной матрицы не существует. Следовательно, система является неуправляемой.
Теперь исследуем наблюдаемость относительно выходной переменной датчика, которая определяется уравнением:
 .
.
Тогда

и
 .
.
Окончательно имеем
 .
.
Определитель этой матрицы равен 25, следовательно, обратная матрица существует, а значит, система является наблюдаемой.
Приведенные вычисления проверяются с помощью следующей программы MatLab.
Пример 11.5.
%-----------Начало программы Pr_03_14--------
А=[-1 1 0; 0 0 0; 5 0 -5]; %Исходные данные
В=[1; 5; 0]; С=[О О 1]; %Исходные данные
Со=ctrb(А, В) %Формирование матрицы управляемости Со.
det(Со), pause %Определение определителя матрицы Со.
Оb=obsv(А, С) %Формирование матрицы наблюдаемости Ob.
det(Оb) %Определение определителя матрицы Ob.
По команде ctrbвычисляется матрица управляемости, а по командеobsv— матрица наблюдаемости, а затем путем определения ранга этих матриц определяется управляемость и наблюдаемость систем регулирования. В большинстве систем, являющихся либо неуправляемыми, либо ненаблюдаемыми, либо и то и другое, происходит сокращение нуля и полюса.
Следовательно, в результате такого сокращения модель системы имеет более низкий порядок. Система, в которой число переменных состояния больше, чем ее минимальный порядок, будет либо неуправляемой, либо ненаблюдаемой, либо и то и другое. Для примера рассмотрим
 электрическую схему, изображенную на
рис.11.6. Для этой схемы справедливы
следующие уравнения:
электрическую схему, изображенную на
рис.11.6. Для этой схемы справедливы
следующие уравнения:

Эти уравнения можно привести к стандартной форме уравнений состояния:

По этим уравнениям запишем матрицы
 и
и :
:
 ,
, .
.
Следовательно,
 ,
,
и матрица управляемости принимает вид:
 .
.
Определитель этой матрицы равен нулю, следовательно, система неуправляема.
Заметим, что в рассмотренной нами схеме
две параллельные
 -ветви
могут быть объединены в одну цепь с
сопротивлением
-ветви
могут быть объединены в одну цепь с
сопротивлением и индуктивностью
и индуктивностью .
Поэтому передаточная функция от входного
напряжения к току
.
Поэтому передаточная функция от входного
напряжения к току равна
равна
 .
.
Она имеет первый порядок, тогда как модель схемы в переменных состояния второй, что и определяет неуправляемость схемы.
Целесообразно отметить, что проблемы управляемости и наблюдаемости сформулированы относительно моделей, у которых можно достигнуть полного сокращения нулей и полюсов. Реальная система отличается от её математической модели и в ней не удается достичь полного сокращения нулей и полюсов. Они могут быть компенсированы только приблизительно. Но даже при приблизительной компенсации трудно влиять на свойства системы по приблизительно компенсируемым координатам или оценивать их.