

3й курс 5 семестр / Sbornik_k_r_i_rasch_-graf_zad
.pdfМинистерство аграрной политики и продовольствия Украины Государственное агентство рыбного хозяйства Украины
КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
Морской факультет Кафедра промышленного рыболовства
Цикл инженерной механики
Теория механизмов и машин и детали машин
Методические указания к выполнению контрольных работ и расчетно-графических заданий
для студентов направления: 6.070104 «Морской и речной транспорт» специальности: «Эксплуатация судовых энергетических установок» форма обучения: дневная и заочная
Керчь, 2013г.
УДК 621.01 - 621.81
Т33
Составитель: Ерохина И. С. ст. преподаватель кафедры «Промышленного рыболовства» КГМТУ.
Рецензент: Максимов А. Б. к.т.н., доцент кафедры «Промышленного рыболовства».
Методические указания рассмотрены и одобрены на заседании кафедры «Промышленного рыболовства».
Протокол № 7 от 07.05.2013 г.
Методические указания утверждены и рекомендованы к публикации на методической комиссии МФ КГМТУ
Протокол № 4 от 03.07.2013г.
© Керченский государственный морской технологический университет
2
Содержание
Введение |
4 |
|
1. |
Требования к оформлению РГЗ и контрольной работы. |
5 |
2. |
Тематический план практических занятий для СМ2. |
5 |
3. |
Определение степени подвижности кинематической цепи. |
|
|
Задача №1. |
6 |
4. |
Определение недостающих размеров звеньев кинемати- |
|
|
ческой схемы механизма, требуемой мощности механизма. |
|
|
Задача №2. |
10 |
5.Кинематический анализ простой и планетарной коробки передач.
|
Задача №3. |
22 |
6. |
Расчет механических передач. |
|
|
Задача №4. |
37 |
7. |
Расчеты на прочность. |
|
|
Задача №5. |
50 |
8. |
Перечень вопросов выносимых на защиту задач |
62 |
9. Список использованной литературы |
64 |
|
3
Введение
Настоящие методические указания предназначены для выполнения контрольных работ и расчетно-графических заданий по дисциплине «Теория механизмов и машин и детали машин».
Методические указания для выполнения контрольных работ и расчетнографических заданий рекомендованы для практического использования студентами дневного и заочного обучения специальности «Эксплуатация судовых энергетических установок».
Студенты дневной формы обучения выполняют расчетно-графическое задание.
Расчетно-графическое задание для студентов дневной формы обучения
|
|
Таблица 1 |
|
|
|
Специальность |
Семестр |
РГЗ |
СМ-2 |
4 |
Задачи: №2, №3, №4. |
|
|
|
Студенты заочной формы обучения выполняют контрольную работу.
Контрольные работы для студентов заочной формы обучения
|
|
Таблица 2 |
|
|
|
Специальность |
Семестр |
Контрольная работа |
|
|
Задачи: |
ЗСМ-3 |
6 |
№1, №2, №3, №4, №5 |
|
|
|
Вариант для выполнения контрольной работы и расчетно-графического задания студент выбирает по двум последним цифрам зачетной книжки. Если две последние цифры, например, представляют собой число 48, то 8 – рисунок, а 4 – вариант.
Контрольная работа или расчетно-графическая должна быть выполнена студентом, проверена преподавателем и защищена студентом до проведения экзамена по данной дисциплине в срок, указанный преподавателем.
4
1. Требования к оформлению контрольной работы и РГЗ.
Расчетно-графическая работа выполняется на листах А4. На первом листе указывается название дисциплины, фамилия и инициалы студента, учебный шифр, факультет и специальность.
Контрольная работа выполняется в отдельной тетради (ученической), страницы которой нумеруются. На обложке указываются: название дисциплины, номер работы, фамилия и инициалы студента, учебный шифр, факультет и специальность. Решение каждой задачи начинать с указания номера задачи, что дано, выполнить схему и что требуется определить.
По ходу решений надо давать подробные ссылки на источник принятых расчетных сведений. Чертеж должен быть аккуратным и наглядным. На каждой странице следует оставлять поля для замечаний рецензента. В конце работы необходимо привести список использованной литературы.
2. Тематический план практических занятий для СМ2.
занятия№ |
час(Объем) |
Наименование тем. |
|
Краткое содержание материала |
|||
|
|
||
|
|
|
|
3 |
4 |
5 |
|
|
|
|
|
|
|
Определение степени подвижности |
|
|
|
кинематической цепи. |
|
1 |
2 |
Определение недостающих размеров звеньев |
|
|
|
||
|
|
кинематической схемы механизма, требуемой |
|
|
|
мощности механизма. |
|
|
|
|
|
2 |
4 |
Кинематический анализ простой и планетарной |
|
коробки передач. |
|||
|
|
||
|
|
|
|
3 |
2 |
Выбор электродвигателя и кинематический |
|
расчет привода. |
|||
|
|
||
|
|
|
|
4 |
2 |
Расчет прямозубой цилиндрической передачи. |
|
|
|
|
|
5 |
2 |
Расчет косозубой цилиндрической передачи. |
|
|
|
|
|
6 |
2 |
Расчет червячной передачи. |
|
|
|
|
|
7 |
2 |
Расчет конической передачи. |
|
|
|
|
|
8 |
2 |
Расчет вала. |
|
|
|
|
|
Всего: |
18 |
|
|
|
|
|
|
|
|
5 |
3. Определение степени подвижности кинематической цепи.
Механизмом называется искусственно созданная система тел, преобразующая движения одного или нескольких тел в требуемые движения других тел.
Деталью называется элементарная часть механизма и машин, изготовленная без применения сборочных операций.
Звеном называется одно или несколько жестко соединенных твердых тел, входящих в состав механизма.
Звено механизма, совершающее движение, для выполнения которого предназначен механизм, называется ведомым.
Звено, которому сообщается движение, преобразуемое механизмом в требуемые движения ведомых звеньев, называется ведущим.
Кинематической парой называется соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Элементом звена называются поверхности, линии, точки, по которым оно может соприкасаться с другим звеном, образуя кинематическую пару.
Числом степеней свободы материальной точки или тела (звена) называется число независимых координат (перемещений), которым обладает материальная точка или тело (звено).
Класс механизма определяется по группе Ассура, имеющей наивысший
класс.
Порядок механизма определяется по группе Ассура наивысшего класса, имеющей наивысший порядок.
Кинематической цепью называется совокупность звеньев механизма, соединенных кинематическими парами.
Кинематические цепи бывают: замкнутые, простые, разомкнутые. Простой механизм, состоящий из одного подвижного звена, образующего с
неподвижным звеном низшую кинематическую пару, называется механизмом I класса.
Группой Ассура называется плоская кинематическая цепь, присоединение которой к другой кинематической цепи не изменяет числа степеней свободы последней, т. е. группа Ассура имеет нулевую степень свободы.
Группой Ассура называется кинематическая цепь, которая в случае ее присоединения элементами внешних пар к стойке получает нулевую степень подвижности.
Класс группы Ассура определяется числом внутренних кинематических пар, образующих наиболее сложный замкнутый профиль.
Порядок группы Ассура определяется числом внешних кинематических пар, которыми она может быть присоединена к другой кинематической цепи.
Звено, находящееся в пространстве и не связанное с другими звеньями, имеет шесть степеней свободы: три поступательные движения вдоль осей oX, oY, oZ и три вращательные движения вокруг этих осей.
Кинематическая пара накладывает ограничения, т.е. связи, на относительное движение звеньев, связанных этой кинематической парой.
Обозначим S - число связей, накладываемых кинематической парой. На плоскости свободное звено имеет три степени свободы: два
6
поступательных движения вдоль осей oX, oY и одно вращательное движение
вокруг оси, перпендикулярной плоскости XoY . В этом случае число связей, накладываемых кинематической парой на относительное движение связанных звеньев может быть 1≤ S≤2.
Кинематические пары делятся на классы, которые соответствуют числу накладываемых связей.
Механизмам присваивается определённый класс, соответствующий наивысшему классу входящих в него структурных групп.
Для определения класса механизма его расчленяют на структурные группы, начиная с конца механизма. За начало механизма принимают ведущее звено (начальный механизм).
От конца механизма отделяются поочерёдно простейшие структурные группы до тех пор, пока не останется лишь механизм 1-го класса (начальный механизм, их может быть несколько).
По классу структурных групп определяют класс механизма. Количество начальных механизмов равно величине W.
Степень подвижности W плоских механизмов определяется по формуле Чебышева
W = 3n – 2P5 – P4,
где :n – число подвижных звеньев;
Р5, Р4 – число кинематических пар 4, 5 классов; 1, 2, 3 – число исключаемых степеней свободы.
Число степеней свободы звена кинематической пары равно разности числа степеней свободы звена, не связанного кинематическими парами, и количества наложенных связей.
Подвижность кинематической пары равна числу степеней свободы звена, связанного этой кинематической парой.
Структурными формами называются закономерности, связывающие число степеней свободы Н кинематической цепи механизма с числом звеньев и числом и видом его кинематических пар.
Для определения числа степеней свободы пространственного механизма применяется структурная формула Сомова-Малышева:
W = 6n-5p5-4p4-3p3-2p2-p1 ,
где: W – число степеней подвижности; n – число подвижных звеньев;
p5 – число кинематических пар 5 класса; p4 - число кинематических пар 4 класса; p3 - число кинематических пар 3 класса; p2 - число кинематических пар 2 класса; p1 - число кинематических пар 1 класса.
Эта формула служит для определения степени подвижности пространственной кинематической цепи.
Пример 1. Механизм манипулятора образован из пространственной незамкнутой кинематической цепи (рисунок 3.1). Звенья этой цепи имеют названия:
0 – корпус; 1 – плечо; 2 – предплечье; 3 – кисть (захват); 4 – палец. Кинематические пары:
7
А – плечевой сустав Р3; В – локтевой сустав Р1; С – кистевой сустав Р3.

Рис. 3.1.
Звено – 4 (палец) при структурном анализе объединяется со звеном 3. Поэтому цепь состоит из стойки и трех подвижных звеньев и имеет
степень подвижности W = 7, так как число степеней свободы незамкнутой кинематической цепи равно сумме подвижностей кинематических пар или
W = 6n – 5Р1 – 4Р2 – 3Р3 – 2Р4 – Р5 = 6 * 3 – 5 *1 – 3* 2 = 7.
Пример 2.
Рис. 3.2.
Число степеней свободы
W 6 n 5 P5 4 P4 3 P3 2 P2 P1
Где: n = 7– число подвижных звеньев (1,2,3,4,5,6 и 7); 8 – неподвижное звено;
P5 7 – число кинематических пар 5 класса(A, B, С, D, E, F, K); B, С, E, F, K – вращательные;
A, D – поступательные.
W 6 * 7 5 * 7 7
Механизм имеет 7 степеней свободы.
8

Задача №1
Определить степень свободы пространственного манипулятора промышленного робота. Вариант схемы механизма, подлежащий анализу, выбирается из рис. 1 по последней цифре шифра студента.
При структурном анализе схемы манипулятора с несколькими степенями свободы указать стойку, подвижные звенья, виды кинематических пар и их взаимное расположение. Число степеней свободы манипулятора определяется по формуле для пространственных механизмов.
Решение задач рассматривается в [1] стр. 34-37.
Рис.1
9
4. Определение недостающих размеров звеньев кинематической схемы механизма, требуемой мощности механизма.
Указания к решению задачи
Для решения задачи проектирования кинематической схемы по заданным условиям необходимо ознакомиться с характером движения звеньев кривошипноползунных, кулисных механизмов и механизмов шарнирного четырехзвенника, а также с положением звеньев при крайних положениях выходных звеньев.
Определение движущего момента связано с использованием уравнения движения механизма, устанавливающего связь между работами сил и изменением кинетической энергии, которое за цикл установившегося движения равно нулю.
В этом случае работа движущих сил равна работе сил полезного сопротивления и сил трения (вредное сопротивление). Работа сил, моментов движущих и полезного сопротивления определяется по линейным и угловым перемещениям звеньев, на которые они действуют.
Работа сил трения учитывается введением в расчет коэффициентов полезного действия. Чтобы определить зоны рабочего и холостого ходов для входного звена, нужно учитывать связь движения выходного звена с показанным направлением действия полезного сопротивления,, которое на рабочем ходу препятствует движению последнего.
Размеры звеньев, согласно их обозначениям на схеме механизма, и другие необходимые величины приводятся в таблицах числовых данных, где — коэффициент полезного действия.
Рычажным механизмом называется механизм, звенья которого образуют только вращательные и поступательные пары.
Рычажный механизм, звенья механизма которого только вращательные пары, называется шарнирным механизмом.
Звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси, называется кривошипом.
Звено рычажного механизма, которое может совершать неполный оборот вокруг неподвижной оси, называется коромислом.
Звено рычажного механизма, не образующее кинематических пар с неподвижным звеном, называется шатуном.
Звено рычажного механизма, образующее поступательную пару с неподвижным звеном, называется ползуном.
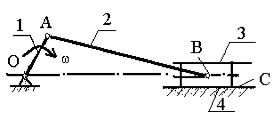
Рассмотрим простейший кривошипно-ползунный механизм:
Рис.4.1.
1 – кривошип, 2 - шатун, 3 – повзун, 4 - стойка. Кинематические пары: А, В, С, О.
10