

1.5.1 Последовательное соединение звеньев
На рис. 1 представлено последовательное соединение трех звеньев.

Рисунок 1.5.1.1 – Последовательное соединение звеньев
Задача: зная передаточные функции и частотные характеристики отдельных звеньев, получить передаточную функцию и частотные характеристики всей цепи. В соответствии с рис. 1
![]() .
.
![]() . (1.5.1.1)
. (1.5.1.1)
В соответствии с (1) для АФЧХ
![]() . (1.5.1.2)
. (1.5.1.2)
На основании (2) для АЧХ
![]()
![]() (1.5.1.3)
(1.5.1.3)
На основании (3) для ЛАЧХ
 (1.5.1.4)
(1.5.1.4)
В соответствии с (2) для ФЧХ и ЛФЧХ
 (1.5.1.5)
(1.5.1.5)
К сожалению, для временных динамических характеристик такие простые соотношения отсутствуют. Временные динамические характеристики всей цепи не могут быть найдены по временным динамическим характеристикам отдельных звеньев.
1.5.2 Параллельное соединение звеньев
На рис. 1 представлено параллельное соединение трех звеньев.
Задача: зная передаточные функции и временные динамические характеристики отдельных звеньев, найти передаточную функцию и временные динамические характеристики всей цепи.

Рисунок 1.5.2.1 – Параллельное соединение звеньев
Передаточная функция всей цепи в соответствии с рис. 1 определяется следующими соотношениями:
![]() .
.
На основании
полученного выражения для
![]() звеньев можно записать
звеньев можно записать
![]() . (1.5.2.1)
. (1.5.2.1)
Переходная функция
![]() и функция веса
и функция веса![]() всей цепи в соответствии с рис. 1
определяются следующими соотношениями:
всей цепи в соответствии с рис. 1
определяются следующими соотношениями:
![]() , (1.5.2.2)
, (1.5.2.2)
![]() . (1.5.2.3)
. (1.5.2.3)
Для получения частотных динамических характеристик всей цепи надо рассматривать всю цепь целиком.
1.5.3 Встречно-параллельное соединение звеньев
На рис. 1 представлено встречно-параллельное соединение трех звеньев.

Рисунок 1.5.3.1 – Встречно-параллельное соединение звеньев
Цепь, содержащая
звено
![]() (
(![]() ),
называетсяпрямой
(обратной) связью.
),
называетсяпрямой
(обратной) связью.
Задача:
зная передаточные функции
![]() и
и![]() ,
найти передаточную функцию всей цепи.
,
найти передаточную функцию всей цепи.
В соответствии с рис. 1
![]() (1.5.3.1)
(1.5.3.1)
откуда
![]() (1.5.3.2)
(1.5.3.2)
Классификация обратных связей
Предположим, что
![]() ,
тогда, если к сумматору обратная связь
(ОС) подходит со знаком + (-), то ОС
называется положительной (отрицательной).
При положительной ОС в знаменателе
должен стоять (-), при отрицательной –
(+).
,
тогда, если к сумматору обратная связь
(ОС) подходит со знаком + (-), то ОС
называется положительной (отрицательной).
При положительной ОС в знаменателе
должен стоять (-), при отрицательной –
(+).
Если
![]() ,
то ОС называетсяединичной.
В этом случае структурная схема имеет
вид
,
то ОС называетсяединичной.
В этом случае структурная схема имеет
вид

Рисунок 1.5.3.2
Если звено
![]() является позиционным, то ОС называетсяжёсткой.
является позиционным, то ОС называетсяжёсткой.
Если звено
![]() дифференцирующего типа, то ОС называетсягибкой или
скоростной.
дифференцирующего типа, то ОС называетсягибкой или
скоростной.
САУ могут содержать несколько обратных связей, например, так, как показано на рис. 3.

Рисунок 1.5.3.3 – Типы обратных связей
Единичная ОС
является местной
ОС, а связь,
содержащая звено
![]() ,
являетсяглавной.
Главная ОС в подавляющем большинстве
случаев является отрицательной.
,
являетсяглавной.
Главная ОС в подавляющем большинстве
случаев является отрицательной.
Полученные соотношения между передаточными функциями для трех типов соединения звеньев позволяют получить передаточные функции и для сложных соединений звеньев.
Пусть дана структурная схема системы (рис. 4)
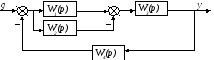
Рисунок 1.5.3.4 – Пример соединения звеньев
Задача: зная передаточные функции звеньев, найти передаточную функцию всей цепи. Для данной схемы можно записать
