

1.8.2 Коэффициентные (алгебраические) критерии устойчивости
Как следует из предыдущего пункта, устойчивость или неустойчивость системы зависит от корней характеристического уравнения, в свою очередь, корни зависят от коэффициентов характеристического уравнения, поэтому естественно желание найти критерии устойчивости без расчёта корней, рассматривая непосредственно коэффициенты характеристического уравнения.
Среди большого количества коэффициентных критериев устойчивости будем рассматривать два:
1) критерий о необходимых условиях устойчивости;
2) критерий Рауса-Гурвица.
1.8.2.1 Критерий о необходимых условиях устойчивости
Для того чтобы система была асимптотически устойчивой, необходимо, чтобы все коэффициенты характеристического уравнения были одного знака и отличались от нуля.
Пример. Дано уравнение
![]() .
.
Это дифференциальное уравнение допускает частное стационарное решение
![]() .
.
Задача: будет ли частное (вынужденное) решение асимптотически устойчивым?
Ответ: решение не будет асимптотически устойчиво, т.к. один коэффициент характеристического уравнения равен нулю.
1.8.2.2 Критерий Рауса-Гурвица
Пусть дано характеристическое уравнение
![]() . (1.8.2.1)
. (1.8.2.1)
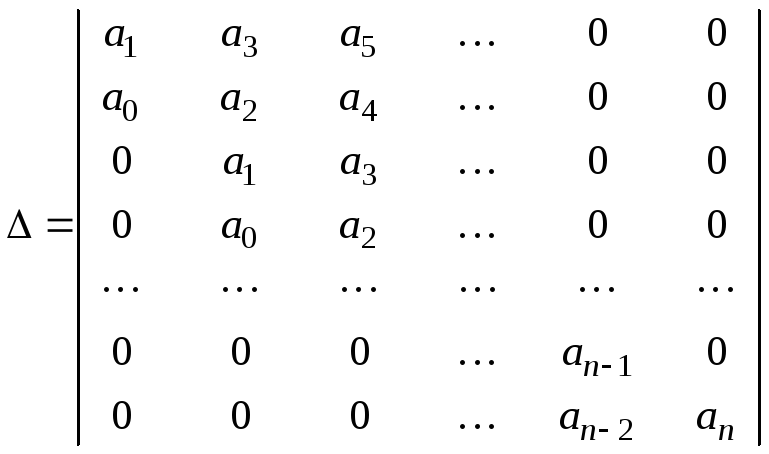
Составим для него определитель Гурвица размера (n х n)
 . (1.8.2.2)
. (1.8.2.2)
Следует обратить
внимание на то, что в первой строке
расположены нечетные коэффициенты, во
второй – четные, а на главной диагонали
расположены коэффициенты
![]() .
.
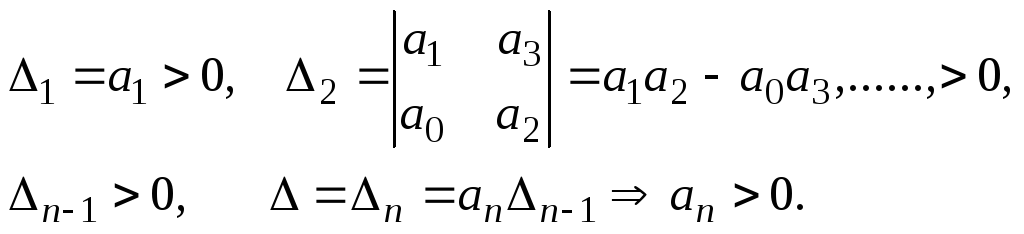
В соответствии с критерием Рауса-Гурвица главные диагональные миноры должны быть положительными, то есть
 (1.8.2.3)
(1.8.2.3)
Критерий Рауса-Гурвица читается так.
Для того чтобы
система была асимптотически
устойчивой,
необходимо
и достаточно,
чтобы при
![]() все главные диагональные миноры (3)
определителя Гурвица (2) были положительны.
все главные диагональные миноры (3)
определителя Гурвица (2) были положительны.
Из соотношений
![]() следует
следует![]() .
.
Для систем первого и второго порядков критерий Рауса-Гурвица сводится к условиям критерия о необходимых условиях устойчивости, т.е. для этих систем необходимым и достаточным условием асимптотической устойчивости является однознаковость всех коэффициентов характеристического уравнения; если имеются коэффициенты с противоположными знаками или нулевые, то система будет неустойчивая.
Рассмотрим критерий Раусса-Гурвица для системы третьего порядка с характеристическим уравнением
![]() .
.
Определитель Гурвица и критерий Рауса-Гурвица имеют вид

1.8.3 Частотные критерии устойчивости
Будем рассматривать следующие критерии:
критерий Михайлова;
критерий Найквиста;
логарифмический критерий Найквиста.
1.8.3.1 Критерий Михайлова
Для его применения необходимо иметь характеристический полином
![]() . (1.8.3.1)
. (1.8.3.1)
Подставим в (1)
вместо
![]()
![]() ,
где
,
где![]() ;
;![]() – частота, которая меняется в диапазоне
от 0 до ∞. В результате получим комплексный
полином
– частота, которая меняется в диапазоне
от 0 до ∞. В результате получим комплексный
полином
![]() , (1.8.3.2)
, (1.8.3.2)
где
![]() –
действительная часть, а
–
действительная часть, а
![]() – коэффициент при мнимой части.
– коэффициент при мнимой части.
![]() , (1.8.3.3)
, (1.8.3.3)
![]() ,
,
или
![]() . (1.8.3.4)
. (1.8.3.4)
Критерий Михайлова является графическим критерием. Для его применения на комплексной плоскости строится годограф (траектория конца вектора) Михайлова. На рис. 6 показаны годографы Михайлова для систем различных порядков n, соответствующие асимптотической устойчивости систем.
Для того чтобы
система была асимптотически
устойчивой,
необходимо
и достаточно,
чтобы при изменении частоты
![]() от 0 до ∞ годограф Михайлова охватывал
начало координат, проходя последовательно
столько квадрантов против часовой
стрелки, каков порядок системы (рисунок
6).
от 0 до ∞ годограф Михайлова охватывал
начало координат, проходя последовательно
столько квадрантов против часовой
стрелки, каков порядок системы (рисунок
6).
Если годограф Михайлова будет проходить через начало координат, то система будет находиться на границе устойчивости (рисунок 7).
Если годограф Михайлова не охватывает начало координат, то САУ будет неустойчивой (рисунок 8).
Из критерия
Михайлова вытекает критерий Эрмита-Билера.
Как следует из рисунка 6, при асимптотической
устойчивости корни полиномов
![]() чередуются.
чередуются.
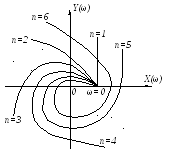
Рисунок 1.8.6 – Годографы Михайлова для устойчивых систем различных порядков
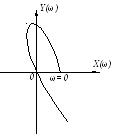
Рисунок 1.8.7
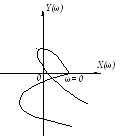
Рисунок 1.8.8
Критерий
Эрмита-Билера.
Для того
чтобы система была асимптотически
устойчивой,
необходимо
и достаточно,
чтобы корни полиномов (3) и (4) были
действительными положительными и
чередовались между собой, начиная с
корня
![]() для полинома (4).
для полинома (4).