

-
Системи відліку і системи координат. Елементи векторної алгебри
По-перше
домовимося про деякі позначення. Векторні
величини
позначатиме так
![]() ,
модуль
того ж вектору -
,
модуль
того ж вектору -
![]() .
Середню
величину
позначатимемо
.
Середню
величину
позначатимемо
![]() або
або
![]() .
.
Рух
одного тіла і того самого тіла відносно
інших тіл можна охарактеризувати
по-різному. Для вивчення руху необхідно
насамперед обрати тіло або систему
нерухомих тіл одне відносно одного,
стосовно яких розглядається рух даного
тіла або його частини. Опис руху будь-якого
тіла має сенс тоді, коли цей рух
розглядається відносно іншого тіла або
системи тіл, які називають тілом
відліку.
Оскільки рух відбувається у просторі
і в часі, то для повного опису руху тіла
потрібно знати розміщення тіла або його
частин в будь-який момент часу. Для цього
з тілом відліку зв’язують систему
координат і годинник, за допомогою якого
визначають проміжки часу між двома
подіями. Тіло відліку з відповідно
зв’язаною системою координат і годинник
утворюють єдину систему
відліку.
Система координат – набір масштабів,
за допомогою яких фіксується розміщення
рухомих тіл у будь-який момент часу.
Розміщенн я
тіл можна визначати за допомогою
довільної системи координат. На практиці
здебільшого користуються прямокутною
системою координат. Роль вдалого вибору
системи відліку можна показати на такому
історичному прикладі: давньогрецький
філософ К.Птолемей вважав Землю центром
Всесвіту і розглядав рухи планет відносно
Землі. Траєкторії руху планет виявилися
дуже складними, пояснити цього філософи
не змогли. А от коли Н.Копернік обрав
тілом відліку Сонце – орбіти планет
виявилися близькими до колових –
еліпсами з малими ексцентриситетами.
я
тіл можна визначати за допомогою
довільної системи координат. На практиці
здебільшого користуються прямокутною
системою координат. Роль вдалого вибору
системи відліку можна показати на такому
історичному прикладі: давньогрецький
філософ К.Птолемей вважав Землю центром
Всесвіту і розглядав рухи планет відносно
Землі. Траєкторії руху планет виявилися
дуже складними, пояснити цього філософи
не змогли. А от коли Н.Копернік обрав
тілом відліку Сонце – орбіти планет
виявилися близькими до колових –
еліпсами з малими ексцентриситетами.
П рямокутна
декартова
(права) (Мал.0.1) в якій трьома числами (х,
y, z), що характеризують положення точки,
є довжини х,y,z. Для
правої системи
поворот від осі
рямокутна
декартова
(права) (Мал.0.1) в якій трьома числами (х,
y, z), що характеризують положення точки,
є довжини х,y,z. Для
правої системи
поворот від осі
![]() до осі
до осі
![]() в напряму найменшого кута між ними (цей
кут показаний вигнутою стрілкою)
відбувається в напрямі проти
годинникової стрілки,
якщо
дивитися на площину
в напряму найменшого кута між ними (цей
кут показаний вигнутою стрілкою)
відбувається в напрямі проти
годинникової стрілки,
якщо
дивитися на площину
![]() з верхівки осі
з верхівки осі
![]() .
.
Циліндрична (Мал.0.2) в якій трьома числами (, ,z), що характеризують положення точки, є довжина , кут і довжина z. Перехід від циліндричних до декартових прямокутних координат:
|
|
(0.2) |
Сферична (Мал.0.3) в якій трьома числами (,,), що характеризують положення точки, є довжина , і кути і . Перехід від сферичних до декартових прямокутних координат:
|
|
(0.3) |
Багато фізичних величин характеризуються одним числом. До них, наприклад, відносяться: температура, маса, енергія, шлях і т.д. Такі величини називаються скалярами. Для характеристики багатьох інших фізичних величин необхідно задати декілька чисел. Фізичні величини, які характеризуються не тільки одним числовим значенням, а і напрямком називаються векторами. Окрім того, складання векторів підкоряється правилу паралелограма. В математиці розглядають вільні вектори (тобто, вектори, які не мають фіксованої точки прикладання).
Вектори спрямовані вздовж паралельних прямих (як одному і тому ж напрямку, так і у протилежних), називають колінеарними. Вектори, які лежать в паралельних площинах, називають компланарними.
Е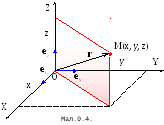 вклідовим
простором
зветься звичайний тривимірний
простір,
в якому є справедливими всі п’ять
відомих аксіом геометрії Евкліда.
Звичайно ми вважатимемо, що в цьому
просторі вже існує Декартова права
система координат, і ми нею користуватимемося.
Будь-яку точку простора з координатами
вклідовим
простором
зветься звичайний тривимірний
простір,
в якому є справедливими всі п’ять
відомих аксіом геометрії Евкліда.
Звичайно ми вважатимемо, що в цьому
просторі вже існує Декартова права
система координат, і ми нею користуватимемося.
Будь-яку точку простора з координатами
![]() можна з’єднати з початком координат
можна з’єднати з початком координат
![]() (origin point) спрямованим відрізком, кінець
якого лежить в точці, а початок в - origin
point. Такий вектор зветься радіус-вектором
(origin point) спрямованим відрізком, кінець
якого лежить в точці, а початок в - origin
point. Такий вектор зветься радіус-вектором
![]() точки
з координатами
точки
з координатами
![]() .
Його проекції на осі координат співпадають
з координатами точки і дорівнюють
.
Його проекції на осі координат співпадають
з координатами точки і дорівнюють
![]() .
Отже, сукупність точок Евклідового
простору і сукупність їх радіус-векторів
знаходяться у взаємно-однозначній
відповідності. Математики сказали б,
що дві ці сукупності є ізоморфними
та інфінітними,
тобто безкінечними за чисельністю.
.
Отже, сукупність точок Евклідового
простору і сукупність їх радіус-векторів
знаходяться у взаємно-однозначній
відповідності. Математики сказали б,
що дві ці сукупності є ізоморфними
та інфінітними,
тобто безкінечними за чисельністю.
Радіусом-вектором
![]() точки називатимемо вектор, початок
якого співпадає з точкою початку системи
координат
точки називатимемо вектор, початок
якого співпадає з точкою початку системи
координат
![]() ,
а кінець – з точкою що розглядається
,
а кінець – з точкою що розглядається
![]() (Мал.0.4).
(Мал.0.4).
![]() ,
,
![]() ,
,
![]() – одиничні
безрозмірні вектори
(орти)
– базис
координатної системи, напрямок яких
співпадає з додатнім напрямком осей
– одиничні
безрозмірні вектори
(орти)
– базис
координатної системи, напрямок яких
співпадає з додатнім напрямком осей
![]() ,
,
![]() ,
,
![]() ,
відповідно:
,
відповідно:
|
|
(0.4) |
де
х, y, z – координати радіуса-вектора
![]() .
.
Добутком
вектора
![]() на число (скаляр)
на число (скаляр)
![]() є інший вектор
є інший вектор
![]() (Мал.0.5), довжина (або модуль, норма) якого
в
(Мал.0.5), довжина (або модуль, норма) якого
в
![]() відрізняється від довжини (модуля, або
норми) вектора
відрізняється від довжини (модуля, або
норми) вектора
![]() .
Якщо проекції вектора
.
Якщо проекції вектора
![]() на осі координат є
на осі координат є
![]() ,
то проекції вектора
,
то проекції вектора
![]() відповідно є такими:
відповідно є такими:
![]() .
Нормою, або довжиною вектора (ще інакше
цю величину звуть модулем),
як відомо, вважається величина:
.
Нормою, або довжиною вектора (ще інакше
цю величину звуть модулем),
як відомо, вважається величина:
|
|
(0.5) |

Сумою
(різницею) двох векторів
(![]() +
+![]() )
називають вектор
)
називають вектор
![]() ,
який сполучає початок першого вектора
(
,
який сполучає початок першого вектора
(![]() )
з кінцем другого вектора (
)
з кінцем другого вектора (![]() ).
Як видно з Мал. 0.6 та 0.7 сума (різниця)
векторів не залежить від порядку
додавання.
).
Як видно з Мал. 0.6 та 0.7 сума (різниця)
векторів не залежить від порядку
додавання.
|
|
(0.6) |
С калярним
добутком
(або лінійною комбінацією) двох векторів
калярним
добутком
(або лінійною комбінацією) двох векторів
![]() і
і
![]() називають число, яке дорівнює добутку
модулів цих векторів на косинус кута
між ними і записують його так:
називають число, яке дорівнює добутку
модулів цих векторів на косинус кута
між ними і записують його так:
|
( |
(0.7) |
|
Або
( |
(0.7а) |
якщо
вектори задано своїми декартовими
координатами
![]() (
(![]() ),
),
![]() (
(![]() ),
),
![]() –
кут між векторами
–
кут між векторами
![]() і
і
![]() .
Скалярний добуток взаємно перпендикулярних
векторів дорівнює нулеві. Окрім того,
скалярний добуток є комутативним:
.
Скалярний добуток взаємно перпендикулярних
векторів дорівнює нулеві. Окрім того,
скалярний добуток є комутативним:
|
( |
(0.7б) |
В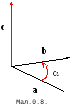 екторним
добутком
[
екторним
добутком
[![]()
![]() ]
векторів
]
векторів
![]() і
і
![]() називається вектор
називається вектор
![]() [
[![]()
![]() ],
який визначається таким чином: вектори
],
який визначається таким чином: вектори
![]() ,
,
![]() і
і
![]() складають праву трійку векторів, тобто
вектор
складають праву трійку векторів, тобто
вектор
![]() перпендикулярний до площини, яку
утворюють вектори
перпендикулярний до площини, яку
утворюють вектори
![]() і
і
![]() ,
і направлений так, що найкоротший поворот
від
,
і направлений так, що найкоротший поворот
від
![]() до
до
![]() навколо
навколо
![]() відбувається проти
годинникової стрілки, якщо дивитись з
кінця вектора
відбувається проти
годинникової стрілки, якщо дивитись з
кінця вектора
![]() (Мал.0.8). за модулем вектор
(Мал.0.8). за модулем вектор
![]() дорівнює добутку модулів векторів
дорівнює добутку модулів векторів
![]() і
і
![]() на синус кута
на синус кута
![]() між ними:
між ними:
|
|
(0.8) |
|
[ |
(0.9) |

Вектори,
які є результатом векторного добутку
[![]()
![]() ]
і які пов’язані із напрямком обертання
мають назву псевдовекторів,
або аксіальних.
Векторний добуток є не
комутативним:
[
]
і які пов’язані із напрямком обертання
мають назву псевдовекторів,
або аксіальних.
Векторний добуток є не
комутативним:
[![]()
![]() ]=-[
]=-[![]()
![]() ].
].
Знову умовимося про позначення:
![]() -
зростання
(приращение – рос.) величини, тобто
різниця поміж кінцевим
-
зростання
(приращение – рос.) величини, тобто
різниця поміж кінцевим
![]() та початковим
та початковим
![]() значенням величини:
значенням величини:
|
|
(0.10) |
(-![]() )
- зменшення
(убыль – рос.) величини, тобто різниця
поміж початковим
)
- зменшення
(убыль – рос.) величини, тобто різниця
поміж початковим
![]() та кінцевим
та кінцевим
![]() значенням величини:
значенням величини:
|
- |
(0.11) |
![]() -
диференціал
(безкінечно мале зростання), наприклад
-
диференціал
(безкінечно мале зростання), наприклад
![]() ,
,
![]() .
.
![]() -
елементарне
значення величини,
наприклад
-
елементарне
значення величини,
наприклад
![]() - елементарна робота.
- елементарна робота.
Похідна
та інтеграл у фізиці мають такий самий,
як і у математиці зміст. Найчастіше в
різних розділах фізики доводиться брати
похідні за часом від функцій часу вигляду
![]() ,
або для векторних величин:
,
або для векторних величин:
|
|
(0.12) |
такі величини у фізиці з часів Ньютона позначаються точкою (або декількома точками, якщо мається на увазі похідна вищого порядку) над символом:
|
|
(0.13) |
|
Факультет машинобудування |
|
|
|
Лектор Дон Н.Л. |
|
стор.
|