

|
|
Лабораторна робота №5 дослідження трифазного асинхронного електродвигуна з короткозамкненим ротором
Мета роботи: Вивчити будову та принцип дії трифазного асинхронного електродвигуна з короткозамкненим ротором; ознайомитися з маркуванням фаз обмотки статора; дослідити електродвигун в режимі холостого ходу та з навантаженням, побудувати його характеристики; визначити способи штучного підвищення коефіцієнта потужності пристрою з асинхронним електродвигуном.
Теоретичні відомості
Трифазний асинхронний електродвигун з короткозамкненим ротором широко використовується в промисловості завдяки простоті конструкції, надійності і простоті в експлуатації, високому ККД і невисокої вартості. Він служить для перетворення електричної енергії трифазного змінного струму в механічну, що знімається з вала двигуна і використовується для приводу в рух різних виконавчих механізмів. Електродвигун з фазним ротором (з контактними кільцями) застосовується в текстильних виконавчих механізмах, де потрібні плавні пуск і регулювання швидкості, наприклад для приводу друкарських машин, каландри сушильних барабанів, у харчовій промисловості - на цукрових заводах у приводах центрифуг, у деяких прокатних станах, особливо коли вони постачені маховиком, у приводах з вентиляційним моментом, у кранових пристроях, у підйомниках різного виду.
Однак у порівнянні з короткозамкненим, вартість фазного двигуна вище, будова його складніша, він має менший ККД і cos φ. Тому в сучасній практиці помітна тенденція відмови від двигунів з фазними роторами. Їх застосовують у тих випадках, коли короткозамкнені не проходять по нагріванню, не дають необхідних характеристик або не можуть бути встановлені за умовами роботи трифазної мережі.
Трифазний асинхронний електродвигун складається з двох основних частин: нерухомої - статор - і обертової - ротор. Статор і ротор розділені повітряним зазором.
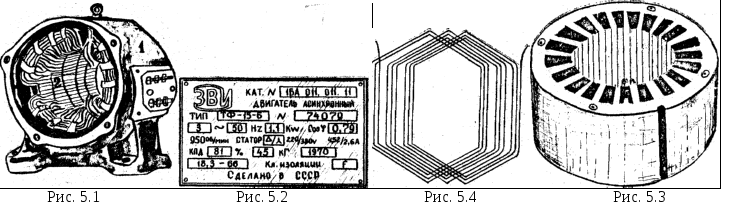
Статор(Рис. 5.1) складається з наступних основних деталей:
корпуса (станини)із клеймом коробкою, римболтом, лапами (або фланцем) і табличкою паспортних даних (Рис. 5.2);
сердечника, що запресовується всередину корпусу, збирається з окремих тонких ізольованих аркушів електротехнічної сталі (Рис. 5.3), з висічками по внутрішній поверхні, що у зібраному сердечнику утворять подовжні канавки - пази;
обмотки з трьох фазних котушок, осі яких зміщені одна відносно одної на 120°. Кожна фазна котушка (скорочено фаза) складається із секцій (Рис. 5.4). Виводи кожної фази зосереджуються в клемній коробці (6 виводів). Початок кожної фази прийнято позначати CI, С2, СЗ, а їхні кінці відповідно С4, С5, С6. Між собою фази можуть бути з'єднані за схемою "зірка" або ''трикутник". Конкретний вид з'єднання обмотки статора залежить від системи напруги мережі та від напруги, на яку розрахована фаза обмотки. , Напругу фази визначаємо за табличкою двигуна. Наприклад, у табличці двигуна є наступний запис: Δ/Y -220/380. Це означає, що фаза обмотки статора розрахована на 220 В. Тому для підключення такого двигуна в мережу 380/220 В обмотку статора варто з'єднувати "зіркою", а при підключенні в мережу 220/127 В – "трикутником”;
до статора двигуна відносять також і два підшипникових щити (кришки), що закривають його з обох сторін. У кришках маються підшипники, у які вставляються кінці вала ротора. Для двигуна з фазним ротором на одній із кришок кріпиться щітковий механізм із трьома мідно-графітними щітками.
Ротортрифазного асинхронного двигуна буває двох видів з короткозамкненою (Рис.5.5) і фазною обмоткою (Рис. 5.6) і складається з наступних деталей:
вала, кінці якого закріплені в підшипниках кришок;
сердечника, виконаного так само, як сердечник статора, але пази розташовані по зовнішній поверхні (Рис.5.7);
обмотки, що може бути короткозамкненою і фазною.
Короткозамкнена обмотка ротора може виконуватися з мідних стрижнів, покладених у пази сердечника і замкнутих накоротко з двох сторін мідними кільцями. Вона нагадує "біляче колесо" (Рис. 5.8). У сучасних асинхронних двигунах така обмотка виконується заливанням пазів сердечника ротора розплавленим алюмінієм, що істотно знижує вартість ротора. Фазна обмотка виконується точно так само, як і обмотка статора. Між собою фази обмотки ротора з'єднують за схемою "зірка". Вільні виводи обмотки ротора приєднують до трьох мідних або сталевих контактних кілець, що містяться на валу і ізольовані як від нього, так і одна від одної. По кільцях ковзають три нерухомих щітки, закріплені на кришці. Контактні кільця через щітки можуть бути з'єднані з трифазним реостатом. Для охолодження двигуна на його вал накладають крильчатку вентилятора. На Рис. 5.9 приведено загальний вид трифазного асинхронного електродвигуна з короткозамкненим ротором, а на Рис. 5.10 - с фазним.
При підключенні обмоток статора до мережі трифазного змінного струму по фазах обмотки починають протікати струми, що утворять у статорі обертове магнітне поле. Поле статора обертається в напрямку порядку проходження фаз зі швидкістю
|
|
(5.1) |
де f - частота струмів статора;
р - число пар полюсів.
Цю швидкість прийнято називати синхронною. Значення синхронних швидкостей для f=50 Гц приведені в табл. 5.1.
Значення синхронних швидкостей для f=50 Гц Таблиця 5.1
|
р |
I |
2 |
3 |
4 |
..... |
40 |
|
n об/хв |
3000 |
1500 |
1000 |
750 |
..... |
75 |
Поле статора, обертаючись, перетинає обмотку статора і ротора і наводить у них ЕРС. Якщо обмотка ротора не замкнута через кільця і щітки, то ротор буде залишатися нерухомим, а асинхронний двигун - уподібнюватися трифазному трансформаторові, що відрізняється від звичайного трансформатора тільки в конструктивному відношенні (наявність зазору, розподілена обмотка на статорі і роторі і т.д.).
Коефіцієнт трансформації асинхронного двигуна
|
|
(5.2) |
де Е1 і Е2 - ЕРС обмотки відповідно статора і ротора;
К1 і К2 - обмотувальні коефіцієнти обмотки відповідно статора і ротора.
Якщо обмотку ротора замкнути накоротко або через трифазний реостат, то наведена ЕРС створить у ній струм. Струм обмотки ротора, взаємодіючи з обертовим магнітним полем статора, приведе ротор в обертання в тому ж напрямку, в якому обертається поле статора. Швидкість обертання ротора n2 буде менше синхронною. Різниця між швидкістю поля статора і швидкістю ротора оцінюється ковзанням
|
|
(5.3) |
Згідно (5.3), ковзання в режимі двигуна може змінюватися в межах від одиниці до нуля. При холостому ході ковзання складає частки відсотків, при номінальному навантаженні - 2...8%. З (5.3) неважко визначити швидкість обертання ротора
|
|
(5.4) |
При номінальному навантаженні для P=2 n2=1420 об/хв, а при р = 3, n2=950 об/хв.
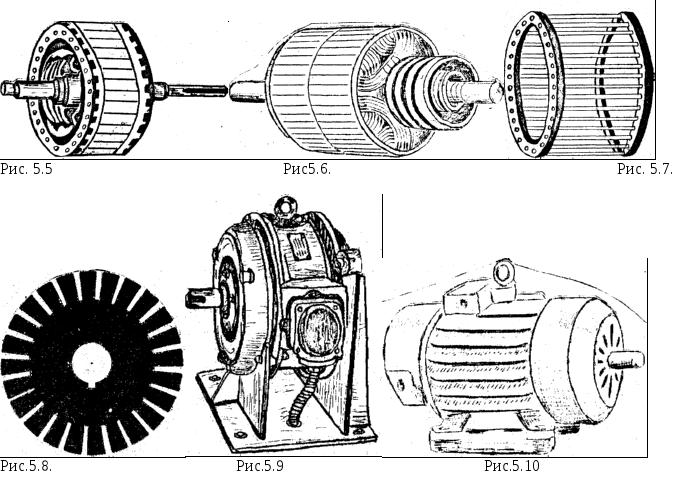
Блок-схема трифазного асинхронного електродвигуна показана на мал. 5.11.
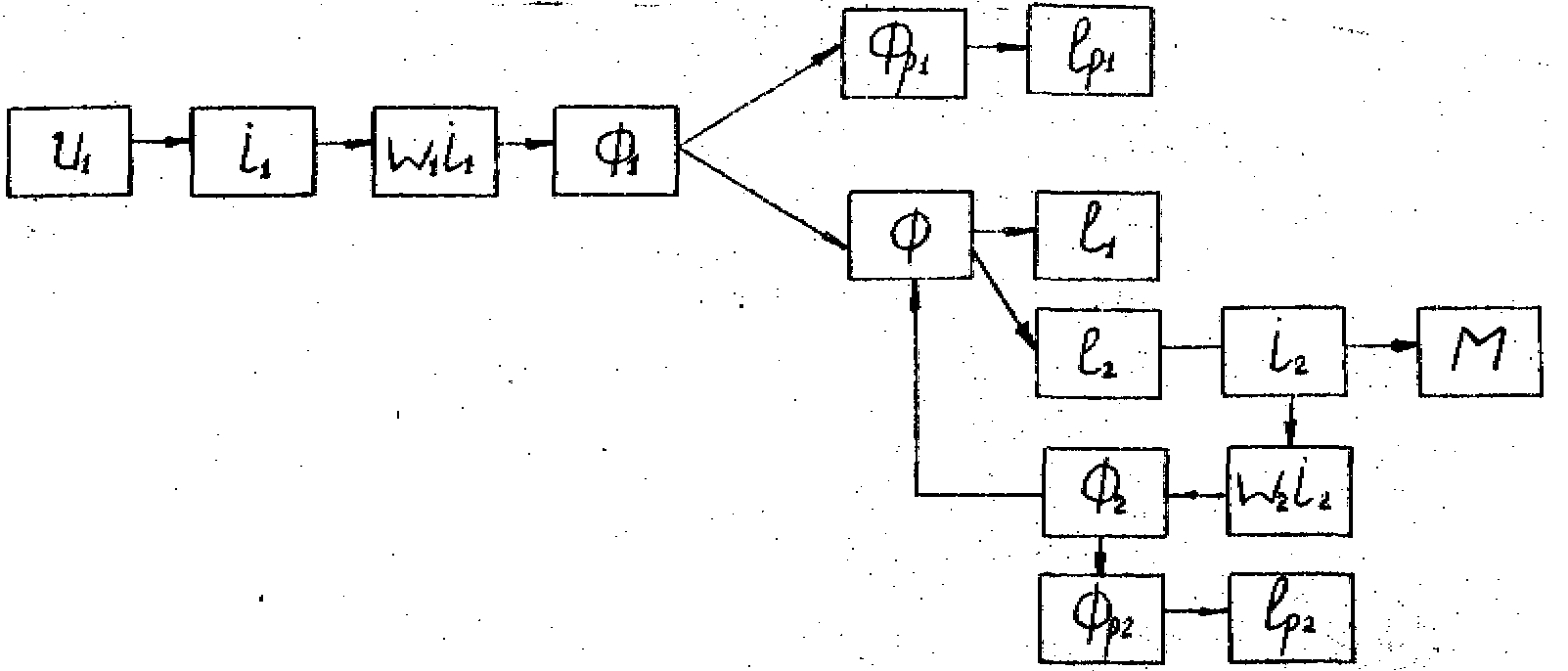 Рис.
5.11
Рис.
5.11
У процесі роботи електродвигуна часто виникає необхідність у зміні його напрямку обертання або так званому реверсуванні. Для асинхронного електродвигуна ця задача вирішується досить просто. Напрямок обертання магнітного поля статора визначається послідовністю фаз трифазної мережі, що живить обмотки статора. Зміна послідовності фаз змінює напрямок обертання магнітного поля статора, а отже, і напрямок обертання ротора. Таким чином, для реверсування асинхронного двигуна практично досить поміняти місцями два сполучних проводи, що зв'язують двигун з мережею.
Судити про робочі властивості асинхронного двигуна можна по його характеристиках:
залежності моменту від ковзанняM=f(S);
механічної характеристики n2=f(M);
робочим характеристикам, тобто залежностям S, n2, M, I1, cos φ1, η корисної потужності на валу двигуна P2.
Розглянемо насамперед характер залежності M=f(S). З цією метою виведемо рівняння моменту і проаналізуємо його при різних значеннях S (у діапазоні від S = 0 до S = I).
Відомо, що на провідник зі струмом, що знаходиться у магнітному полі, діє сила fпр обумовлена по формулі:
|
fпр = Bi2l |
(5.5) |
де B - індукція магнітного поля під полюсом;
i2 - струм у провіднику обмотки ротора;
l- довжина провідника.
Якщо цей провідник розташувати уздовж твірної циліндричної поверхні ротора, то при наявності сили -fпр виникає момент
|
Mпр= B i2 l * D/2 |
(5.6) |
де D - діаметр ротора.
Оскільки ротор асинхронного двигуна складається не з одного, а з N провідників, розподілених по ньому, то можна говорити про деякий середній момент МСР, що виникає через вплив обертового магнітного поля на струм усіх провідників ротора:
|
|
(5.7) |
де α - просторовий кут ротора.
Щоб перейти від (5.7) в інтегральній формі до практичних зручних розрахункових співвідношень, врахуємо, що магнітна індукція від провідника до провідника і струм у провідниках змінюється синусоїдально, тобто
|
|
(5.8) |
|
|
(5.9) |
де Bm ,I2m, - амплітудні значення відповідно магнітній індукції і струму ротора;
ψ2 - кут зсуву фаз між ЕРС і струмом ротора.
Зважаючи, що
|
|
(5.10) |
|
|
(5.11) |
|
|
(5.12) |
|
|
(5.13) |
де Ф - магнітний потік одного полюса;
Вср - середнє значення магнітної індукцій під полюсом;
τ - полюсний розподіл;
P - число пар полюсів;
С =const ;
m2 - число фаз обмотки ротора;
W2 - кількість витків фази обмотки ротора.
Після підстановки маємо:
|
|
(5.14) |
де I2- діюче значення струму ротора.
Окремі складові рівняння (5.14) визначаються співвідношеннями:
|
|
(5.15) |
|
|
(5.16) |
|
|
(5.17) |
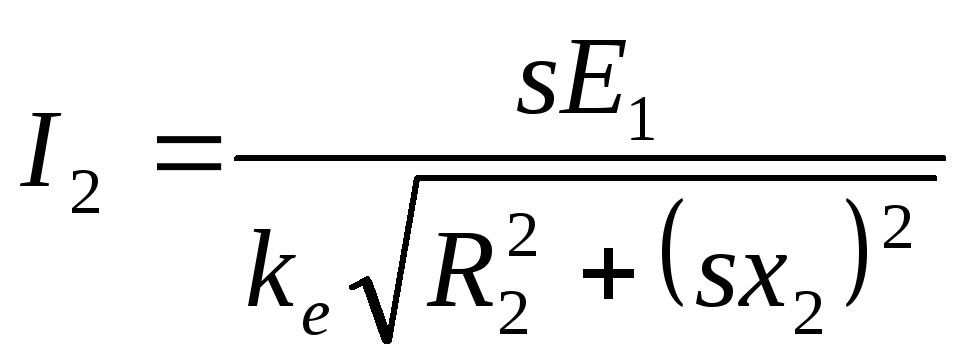

де E1 – ЕРС фази обмотки статора;
W1- кількість витків фази обмотки статора,
R2 і Х2 - відповідно активний та індуктивний опір обмотки ротора.
Використовуючи ці співвідношення, з (5.14) для обертового моменту маємо:
|
|
(5.18) |
|
де
|
(5.19) |
Якщо задаватися різними значеннями S, то за (5.18) можна визначити відповідні йому значення моменту і побудувати графік залежності M = f(S), характер якої показаний на Рис. 5.12.
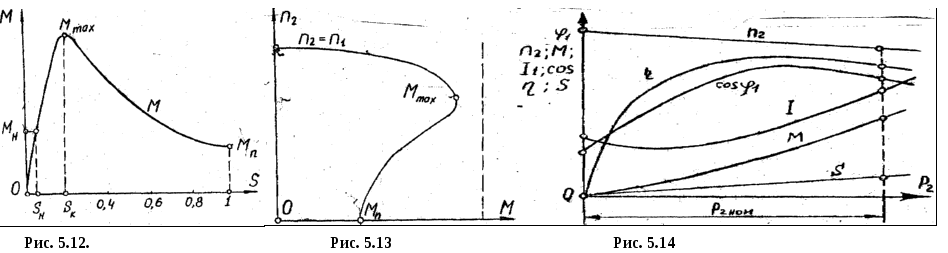
На цьому графіку можна відзначити значення чотирьох характерних точок - моментів:
початкового пускового Mn, при S=I;
максимального Mmax – відповідному критичному ковзанню SK;
M = 0, що відповідає величині S=0 (режим ідеального холостого ходу двигуна);
номінального MH, що відповідає номінальному ковзанню SH (у цьому режимі двигун розвиває номінальну потужність Р2H).
Відношення максимального моменту до номінального визначає перевантажувальну здатність двигуна. Звичайно ця величина дорівнює 2...3 і приведена в каталогах.
Використовуючи (5.18) і (5.4), можна побудувати механічну характеристику асинхронного двигуна n=f(M), загальний вид якого показаний на Рис.5.13. Механічна характеристика дозволяє встановити, з якою швидкістю буде обертатися ротор двигуна при заданому моменті на його валу. З аналізу механічної характеристики випливає, що швидкість асинхронного двигуна при збільшенні моменту на валу від нуля до максимального змінюється незначно. Тому, у зазначених межах зміни моменту механічна характеристика вважається твердою. При підвищенні навантаження понад максимальну двигун входить в область хиткого режиму роботи і зупиняється.
Поряд з розглянутими залежностями наочно ілюструють механічні властивості двигуна його робочі характеристики (Рис. 5.14). Вони отримані при номінальній напрузі мережі і додатковому опорі в колі ротора RP=0 і називаються природними.
При роботі двигуна в звичайних умовах із практично достатньою точністю можна вважати, що U1 ≈ Е1. Це дозволяє зробити висновок, що обертаючий момент асинхронного двигуна пропорційний квадратові напруги мережі. Тому навіть незначна зміна напруги мережі викликає істотну зміну моменту двигуна. Наприклад, при зниженні напруги на 10% момент зменшується на 19%. Якщо вираз (5.18) продиференціюватиь по ковзанню і прирівняти до нуля, визначимо ковзання, при якому обертаючий момент максимальний. Це ковзання називається критичним:
|
|
(5.19) |
Критичне ковзання зі збільшенням активного опору зростає, максимальний момент не змінюється. Це видно з формули максимального моменту (5.18), підставляючи замість S значення SK з (5.19):
|
|
(5.20) |
Важливим показником трифазного асинхронного електродвигуна є його коефіцієнт потужності
|
|
(5.21) |
|
або
|
(5.22) |
де I1a - активна складового струму I1.
Зі збільшенням навантаження активна складового струму зростає, реактивна складова майже не змінюється. Тому при холостому ході двигуна його коефіцієнт потужності досить низький - порядку 0,1...0,2. Зі збільшенням навантаження він швидко зростає і досягає максимального значення (0,7...О,9) при навантаженні, близькому до номінального.
Відносно низький cosφ1 установки з асинхронним двигуном можна підвищити підключенням на виводи обмотки статора батареї конденсаторів. Значення ємності, необхідної для підключення на одну фазу двигуна, визначають з умови рівності реактивної складового струму статора і струму через ємність за формулою:
|
С=P1 (tg φ1-tg φ)·109/2π f1 U1 2 |
(5.23) |
де Р1 - активна потужність двигуна, кВт;
φ1 і φ - кути зсуву фаз відповідно до компенсації та після неї.
З метою зменшення габаритів конденсаторної батареї ємності включають за схемою "трикутник". При цьому значення ємності кожної гілки зменшується в 3 рази порівняно з величиною, розрахованою за (5.23).
Коефіцієнт корисної дії асинхронного двигуна визначається відношенням потужності P2 до підведеної P1,
|
|
(5.24) |
Різниця між потужностями визначає сумарні втрати в двигуні. Їх можна розділити на постійні, що практично не залежать від навантаження, і змінні, залежні від неї.
Постійні втрати - втрати в сталі і механічні, змінні - втрати на нагрівання провідників обмотки статора і ротора. Змінні втрати - додаткові втрати, що виникають внаслідок зміни при обертанні ротора відносного положення зубців статора і ротора, що викликає зміни магнітного опору і пульсації потоку. Одним із засобів зменшення цих втрат служить скіс пазів ротора стосовно пазів статора.
Коефіцієнт корисної дії двигуна досягає максимального значення (65...95%), коли змінні втрати дорівнюють постійним. У більшості двигунів такий високий ККД виникає при навантаженні приблизно 75% від номінального.