

2 СПЕЦИАЛЬНАЯ ЧАСТЬ
2.1 Характеристика объекта автоматизации и выбор структуры управления
Одной из основных задач, возникающих при эксплуатации котельного агрегата, является обеспечение равенства между произведенной и потребляемой энергией с учетом потерь. Итак, задачи регулирования технологического процесса котлоагрегата сводятся в основном к необходимости поддержки материального и энергетического баланса в нем. Таким образом, при наличии материального и энергетического баланса котлоагрегат будет работать в постоянном (стационарном) режиме. Стационарный режим характеризуется постоянством во времени давления, температур, уровней, расходов и других показателей работы котлоагрегата. Переменные (переходные) режимы возникают при различных нарушениях стационарного режима в результате действия различных воздействий, возмущающих.
Технологический процесс в котлоагрегате невозможен без автоматического управления технологическими параметрами.
Кроме изменения технологических параметров в результате регулирующих воздействий, они могут меняться и под действием так называемых внутренних возмущений, носящих случайный или периодический характер, таких, как колебания качества топлива, температуры питательной воды, нарушение плотности топки и так далее. Не все участки котлоагрегата являются звеньями направленного действия, например выходные регулируемые величины одних участков является одновременно входными воздействиями отношению к другим.
Таким образом, котлоагрегат, рассматриваемый как объект автоматического регулирования, представляет собой сложную динамическую звено с несколькими взаимосвязанными входными и выходными величинами.
Поэтому общая задача управления разделяется на ряд подзадач, каждая из которых определяет свой объект регулирования. Такого рода анализ неизбежно приводит к выделению целого ряда объектов управления, поэтому далее будем считать, что к таким объектам относятся: необходимая температура пара, уровень воды в барабане, давление в барабане, расход топлива, соотношение топливо-воздух и другие. Причем эти объекты считают независимыми друг от друга, и при такой интерпретации они становятся объектами с сосредоточенными параметрами.
Динамические свойства этих объектов определяются по кривым разгона, которые для большинства объектов имеют характер кривых с самовыравниванием и определяются экспериментально. Различия в динамике этих объектов определяется временем переходного процесса и, примерно, при регулировании температуры - этo сотни секунд, при регулировании давления - это десятки секунд, а при регулировании расхода - это единицы секунд.
Вообще объект автоматизации состоит из нескольких участков управления, связанных между собой, или локальных каналов, управления отдельными параметрами одной установки или агрегата. В свою очередь и система управления в зависимости от решаемых задач может состоять из нескольких пунктов управления [3].
Различают одноуровневые и многоуровневые структуры управления. Данный объект управления сосредоточены на небольшой территории и имеет относительно несложные параметры регулирования и контроля, поэтому часто применяют одноконтурную структуру, но для экономии электроэнергии и топлива, увеличения срока эксплуатации приборов применим одноуровневую централизованную структуру управления.
На основании структуры управления и с учетом требований к метрологическому обеспечению технологического процесса составлен перечень параметров, подлежащих регулированию, контролю и сигнализации [4].
Параметры, подлежащие регулированию в котлоагрегате Е-50-14 [4]:
- подача топлива в топку котла;
- расход общего воздуха;
- давление в барабане;
- уровень воды в барабане;
- температура перегретого пара;
- разряжение в топке котла;
Основные параметры, подлежащие контролю:
- давление в барабане;
- уровень в барабане;
- температура перегретого пара;
- разряжение в топке котла;
- расход пара.
Параметры, отклонение которых от заданных пределов должно сигнализироваться:
- падение (превышение) давления пара перед встроенной задвижкой;
- падение (превышение) уровня в барабане;
- падение давления воздуха;
- падение разряжения в топке;
- превышение (снижение) температуры перегретого пара.
В данном дипломном проекте разработана АСР питания котлоагрегата.
На величину уровня воды в барабане как объекта автоматизации действуют следующие возмущения:
- изменение нагрузки потребителем;
- изменение температуры питательной воды;
- изменение качества и расхода топлива.
Правящим влиянием для регулирования уровня воды в барабане является изменение расхода питательной воды.
2.2 Аналитический обзор состояния автоматизации и выбор структуры аср
Автоматическая система регулирования питания предназначена для поддержки материальной соответствия между затратами питательной воды в котел и нагрузке котла по пару. Показателем этого соответствия служит уровень воды в барабане котла.
На современных барабанных котлах производительностью 20 т / ч и выше применяются только АСР с трёхимпульсными регуляторами (рисунок 2.1). Это объясняют чрезвычайно жесткими требованиями, предъявляемыми к качеству регулирования.
Снижение уровня ниже допустимых пределов («упуск» воды) может привести к нарушению циркуляции в экранных трубах (опрокидывания циркуляции) и как следствие - к пережога труб. При значительном повышении уровня в барабане возможен захват частиц воды паром, вынесения ее в пароперегреватель и турбину, вызывает занос пароперегревателя и турбины солями и ведет к их разрушению [3].
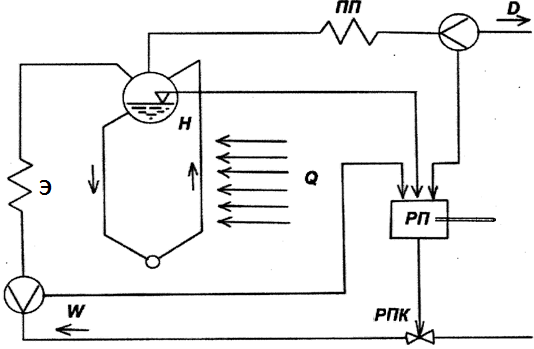
Э – экономайзер; ПП – пароперегреватель; РП – регулятор;
РПК – регулирующий питательный клапан
Рисунок 2.1 – Принципиальная схема АСР питания
Предельные значения уровня в барабане котла определяются на основании специальных расчетов на заводе-изготовителе котельного оборудования и называются уставками по срабатыванию защиты по повышению и понижению уровня. Защита от повышения уровня, как правило, выполняется двухступенчатым. Первая ступень защиты влияет на открытие задвижек аварийного слива из барабана (аварийный сброс); он имеет свою уставку, которая является промежуточной между нормальным уровнем и уставкой защиты от повышения уровня. Вторая ступень защиты влияет на остановку котла. Операции отключения котла и открытия аварийного слива при достижении соответствующих уставок выполняются устройствами защиты (при отключены) и блокировки (открытие-закрытие аварийного слива).
Таким образом, зона работы АСР питания ограничена уставкой защиты от понижения уровня в барабане котла, с одной стороны, и уставкой открытия аварийного, слива, с другой. Эти границы определяют безопасность превышение их вызывает аварийную ситуацию.
АСР питания барабанного котла должна обеспечивать потерю уровня в допустимых пределах:
- при стационарном режиме (при отсутствии риска нагрузки) максимально допустимые отклонения превышать ±20 мм;
- при скачкообразном возмущении по нагрузке на 10% (начальную нагрузку - номинальное) максимально допустимые отклонения по уровню не должны превышать ±50 мм;
- при нормальном стационарном режиме работы котла число включений регулятора не должно превышать шести в минуту.
На уровень в барабане котла влияют многие возмущений. Основные из них: изменение расхода питательной воды W; изменение нагрузки потребителя Б; изменение параметров теплоносителя те его количества; изменение температуры питательной воды.
При возбуждении расходом питательной воды формы переходных процессов по уровню существенно различны в зависимости от типа экономайзера. Для котлов с некипящим экономайзером переходной характеристике собственно так называемое явление «набухание» уровня, то есть изменение уровня в первоначальный момент в сторону, противоположную изменении расхода питательной воды. Объясняется это тем, что, например, увеличение подачи холодной воды, вызывает в первый момент снижения температуры пароводяной смеси в барабане котла и как следствие этого - снижение ее уровня. В дальнейшем уровень начинает расти из-за того, что расход воды в котел превышает расход пара из него.
В кипящих экономайзерах питательная вода нагревается до температуры насыщения и частично (до 20%) превращается в пар. При увеличении расхода питательной воды в первоначальный момент происходит уменьшение объема пара в кипящем экономайзере и питательная вода занимает этот объем. В связи с этим уровень воды в барабане остается без изменения до тех пор, пока происходит замещение питательной водой парового объема в экономайзере.
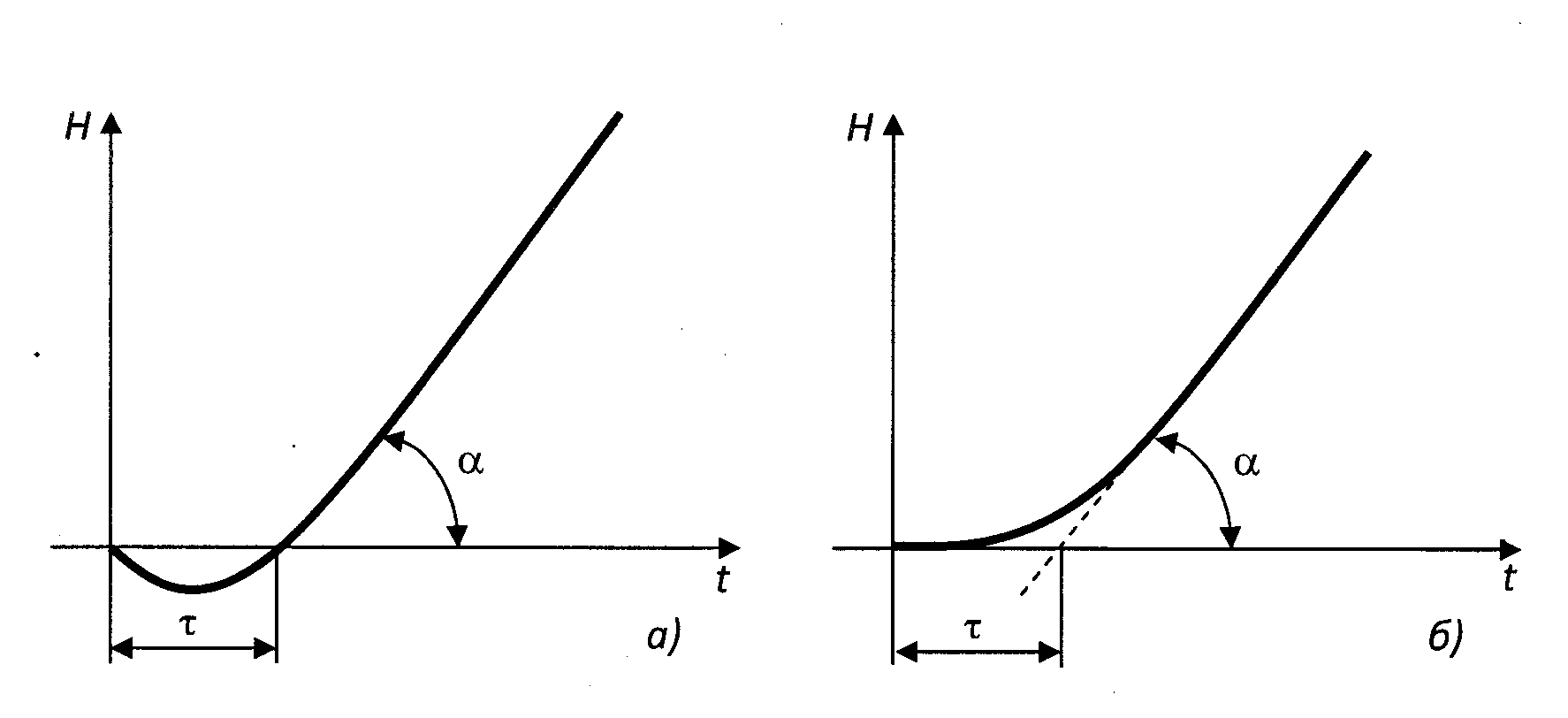
а – при не кипящей экономайзере; б – при кипящем экономайзере
Рисунок 2.2 - Переходные процессы по уровню при возбуждении расходом питательной воды
Для котлов с кипящим экономайзером при возбуждении расходом питательной воды явление «набухание» уровня не наблюдается (рисунок 2.2, б) [3].
При изменении нагрузки потребителя (изменение расхода отборочного пару) меняется давление пара в барабане. Так, при увеличении расхода пара давление падает и в первый момент увеличивается интенсивность парообразования, что приводит к увеличению уровня пароводяной смеси в барабане котла. В дальнейшем уровень начинает падать из-за несоответствия расходов питательной воды и пара. Временной характеристике котла при возбуждении расходом пара всегда свойственно явление «набухание» уровня (рисунок 2.2, а).
Величина «набухание» уровня зависит от параметров пара и конструктивных особенностей котла. Явление «набухание» определяется в основном разницей удельных объемов насыщенного пара и кипящей воды, с повышением давления пара этот эффект уменьшается. Кроме того, «набухание» зависит от тепловой напряжения топочных экранов: с его увеличением увеличивается паровая смесь в топочных экранах, поэтому резко сказывается изменение нагрузки потребителей на «набухании» уровня. В современных котлов с высокой тепловой напряжением колебания уровня при резких и значительных изменениях нагрузки достигают существенного значения.
Характер переходного процесса при возбуждении характеристиками теплоносителя аналогичный характер переходного процесса при возбуждении нагрузкой потребителя (рисунок 2.2, а). Однако явление «набухание» здесь оказывается в несколько меньшей степени. Суть в том, что при изменении характеристик теплоносителя изменяется парообразования, одновременно меняется давление в барабане, который ведет к изменению удельного объема пара. Оба эти фактора действуют на изменение уровня в противоположных направлениях. Вот почему при таких возмущениях явление «набухание» проявляется в меньшей степени.
Возмущения температурой питательной воды может произойти при изменении количества работающих ПВД, что вызовет изменение режима работы экономайзера. При увеличении температуры питательной воды и постоянном обогреве увеличивается парообразования в испарительном контуре. В результате этого уровень в барабане повышаться. В дальнейшем увеличение парообразования при постоянном расходе пара приведет к повышению давления в барабане и как следствие - к уменьшению удельного объема пара, что вызовет снижение уровня. Переходный процесс при возбуждении температурой питательной воды аналогичный приведенному на рисунке 2.2, а.
Типичная АСР питания содержит следующие элементы: первичные измерительные преобразователи (датчики) уровня, расхода пара и воды; регулирующие устройства; коммутирующей аппаратуры, управляющей; исполнительные механизмы; регулирующие органы.
В качестве равномерность наибольшее распространение получили гидростатические приборы с уравнительными сосудами.
Расчетная структурная схема АСР питания представлена на рисунке 2.3. Во внешнем контуре регулируется уровень воды в барабане котлоагрегата, во внутреннем - расход питательной воды.
Xзад (-) f1з yосн f2з yвн![]()








![]()
![]()
![]()













(-)
Рисунок 2.3 - Структурная схема АСР питания
2.3 Разработка математической модели объекта регулирования
Для выполнения синтеза АСР получим передаточные функции мало инерционных и инерционной части объекта регулирования методом аппроксимации его переходных характеристик.
Экспериментально переходные характеристики получают путем подачи на вход объекта регулирования ступенчатого воздействия и фиксации временной зависимости исходной величины объекта регулирования от ступенчатого воздействия. При проведении таких экспериментов устраняется влияние регулирующей аппаратуры и персонала, обслуживающего объект.
Аппроксимация экспериментальных графиков переходных характеристик объектов регулирования обычно имеет два этапа:
- выбор общей аналитической формулы для аппроксимирующей характеристики;
- определение оптимальных значений коэффициентов этой характеристики при минимума принятого критерия приближения характеристик.
На рисунке 2.4 приведены переходные характеристики объекта регулирования малоинерционного контура. Его динамические характеристики будут аппроксимированы передаточной функцией вида
![]()
2 1 T0 h
(t)






![]()
h(tп) tп t,
(с)




1 – исходная; 2 – аппроксимирующая
Рисунок 2.4 – Переходные характеристики малоинерционного объекта
Параметры
данной передаточной функции, определенные
по рисунку 2.4 равны: K = 1,
![]() = 0.5 с, T1
= 1.2 с, Т2
= 0.7 с.
= 0.5 с, T1
= 1.2 с, Т2
= 0.7 с.
Таким образом, передаточная функция малоинерционного объекта может быть аппроксимирована выражением
![]()
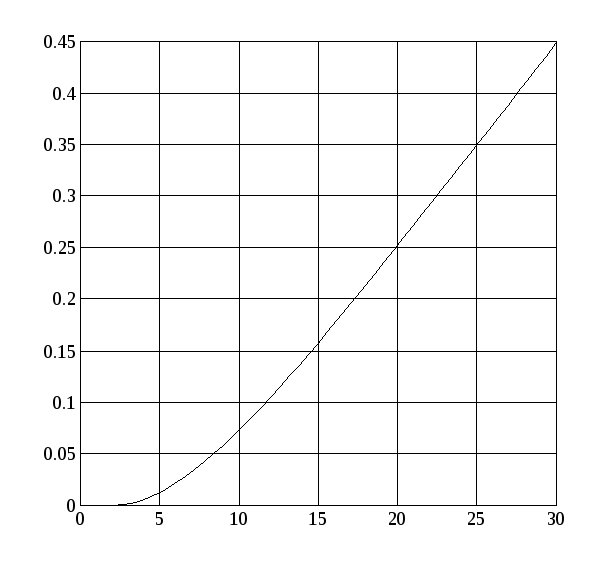
На рисунке 2.5 приведены переходные характеристики общего объекта регулирования. Его динамические характеристики будут аппроксимированы передаточной функцией вида
![]() .
.
Параметры
данной передаточной функции, определенные
по рисунку 2.5 равны: K = 0.02,
![]() = 2.2 с, T = 5.4 с.
= 2.2 с, T = 5.4 с.
Таким образом, передаточная функция общего объекта может быть аппроксимирована выражением
![]() .
(2.1)
.
(2.1)
T0 t,
(с) h
(t) 1 2





![]()



1 – исходная; 2 – аппроксимирующая
Рисунок 2.5 – Переходные характеристики общего объекта
Анализируя кривые, можно сделать вывод, что точность аппроксимации вполне удовлетворительная. Полученная передаточная функция будет использоваться для дальнейшего синтеза.
Согласно структурной схеме АСР, приведенной на рисунке 2.2, общий объект регулирования состоит из малоинерционных и инерционной частей.
Для проверки точности аппроксимации с помощью ЭВМ (с использованием пакета прикладных программ MatLab) по полученной передаточной функции построено переходную характеристику, приведенную на рисунке 2.5 и на чертеже графической части ПД 7.05020201.21 03.
Поскольку
экспериментальная и аппроксимирующая
переходные характеристики совпадают
в точках при t = 0 та t ![]() ,
и проведены касательные имеют одинаковый
наклон, то аппроксимацию можно считать
верной.
,
и проведены касательные имеют одинаковый
наклон, то аппроксимацию можно считать
верной.
Согласно структурной схеме АСР, приведенной на рисунке 2.3, общий объект регулирования состоит из малоинерционной и инерционной частей
![]()
Передаточная функция малоинерционной части может быть определена непосредственно по соответствующей переходной характеристике. После определения передаточной функции общего объекта передаточную функцию инерционной части следует определять следующим образом
Выходные переходные характеристики малоинерционного и общего объектов, полученные с [4] приведены на рисунках 2.4, 2.5.
Поскольку постоянные времени в передаточных функциях малоинерционного и общего объектов существенно отличаются, выделять из последнего передаточную функцию инерционного объекта не требуется. Поэтому в качестве модели инерционного объекта было использовано передаточную функцию (2.1)