

Проектирование электрической схемы прибора.
В проектируемом приборе используем фотоэлектронные датчики, которые состоят из светоизлучающего и фотоприемного узлов.
Фотоизлучающий узел состоит из светодиода VD1 и балластного его сопротивления R3. Светодиод включен в цепь коллектора транзистора VT1, который служит усилителем тока, идущего с генератора.
Чтобы исключить влияние видимого спектра излучения и возможного инфракрасного, от искусственных источников света с частотой f=50-100 Гц, а также естественного излучения, необходимо применять генератор с заведомо большей несущей частотой. Постоянная времени генератора задается элементами R1 и C1 в цепи генератора. Т.о., медленноменяющийся сигнал, просто не будет вызывать ни каких изменений в работе схемы.
В качестве генератора импульсов использована микросхема К561ЛН2 по следующим причинам. Микросхемы этой серии выполнены по КМОП технологии, в данной схеме хорошо работают именно КМОП схемы.
В качестве фоточувствительного элемента используем фотодиод. При попадании на него излучения на его выводах возникает ЭДС. Т.к. фотодиод включен в обратном направлении, через него протекает небольшой ток с той же частотой, с которой работает генератор модуляции излучения. Чтобы не шунтировать фотодиод, с ним последовательно в цепи должен стоять резистор достаточно большого сопротивления. Т.к. через обратный ток фотодиода очень небольшой его необходимо усилить. Для этих целей используем транзистор VT1 с достаточно большим коэффициентом усиления по току.
Далее усиленный сигнал необходимо очистить от низкочастотных помех, которые могут возникнуть при попадании на фотодиод света, падающего от источников освещения. Для этого применим фильтр типа R-C. Постоянную среза фильтра примем f=400 Гц, что гораздо больше частоты источников освещения, что будет обеспечивать уверенную фильтрацию сигнала. Постоянная времени фильтра будет определяться элементами C2 и R6.
После фильтра низких частот сигнал надо демодулировать и очистить от высокочастотных помех. При прохождении шторки между излучающим и фотоприемным диодами, в момент, как только происходит засвечивание диода, возможные вибрации двигателя могут привести к появлению ложного сигнала. Чтобы исключить это влияние на качество работы датчика и применяется фильтр. Постоянная среза этого фильтра должна быть больше нескольких периодов задающего генератора, примем её равной f=1000 Гц. Постоянная времени фильтра рассчитывается, исходя из значений R7 и C3.
Д ля
определения направления движения
стрелки динамометра, необходимо
использовать второй такой же фотоприемный
канал, состоящий из тех же элементов
что и первый канал, а именно фотодиода
VT2 и элементов усиления и фильтрации.
Направление движения стрелки будет
определяться следующим образом (Рис.
14).
ля
определения направления движения
стрелки динамометра, необходимо
использовать второй такой же фотоприемный
канал, состоящий из тех же элементов
что и первый канал, а именно фотодиода
VT2 и элементов усиления и фильтрации.
Направление движения стрелки будет
определяться следующим образом (Рис.
14).
Рис. 14 Определение направления движения стрелки динамометра.
а) Схема расположения датчиков; б) Очередность прихода импульса при определении направления движения стрелки.
При движении стрелки влево, первый датчик шторку минует первым и на его выходе сформируется сигнал в виде логической единицы. Второй датчик пройдет шторку вторым и на его выходе также сформируется сигнал в виде логической единицы. Эта информация обрабатывается в блоке вычисления и если он зафиксирует именно такую очередность прихода логических единиц с датчиков, то на выходе блока вычисления сформируется сигнал в виде плюс единицы (+1). Если стрелка движется вправо, то наоборот уже второй датчик минует шторку первым, а первый вторым, следовательно, последовательность импульсов поменяется, и блок вычисления на выходе сделает вывод уже в виде минус единицы (-1). В том случае если оба датчика будут выдавать логический ноль (0), это значит, что стрелка стоит на месте и не двигается.
В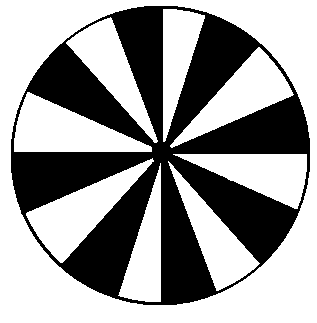 торой
датчик, датчик измерения относительного
удлинения, построен следующим образом.
Он связан с постоянно вращающимся
двигателем, посредством установленного
на его вал круга, с нанесёнными на него
прозрачными и непрозрачными секторами
(Рис.15).
торой
датчик, датчик измерения относительного
удлинения, построен следующим образом.
Он связан с постоянно вращающимся
двигателем, посредством установленного
на его вал круга, с нанесёнными на него
прозрачными и непрозрачными секторами
(Рис.15).
Рис. 15 Пример круга, выступающего в качестве генератора импульсов (деление на сектора условное).
При вращении вала двигателя с определенной частотой (n=1400 об/мин), диск с секторами определенного радиуса вращается также с определенной угловой частотой. Причем количество секторов, примем равным его N=100, этого будет достаточно для требуемой точности измерения. Итак, теперь можно рассчитать частоту импульсов:
F=N·n= 100·1400= 100·1400/60=2330 Гц;
В качестве излучателя также возьмем диод с инфракрасным излучением. Далее это излучение преобразуется в электрический сигнал с вышерасчитанной частотой f посредством фотодиода VD7, который необходимо усилить и профильтровать от низкочастотных и высокочастотных помех. Постоянную среза фильтра низких частот примем равной 400 Гц, как и в остальных фильтрах. Элементы C6 и R15 рассчитываются исходя из этого условия. Постоянную среза фильтра высоких частот примем равной частоте следования импульсов рассчитанной выше, а именно 2330 Гц. Постоянная времени фильтра определяется элементами C7 и R16.
Далее сигналы идущие со всех трех каналов надо обработать и суммировать.
К блоку вычисления предъявляются следующие требования:
должна быть встроенная память под программу;
должен быть таймер - счетчик;
небольшая стоимость.
Всем этим требованиям удовлетворяет микроконтроллер фирмы ATMEL марки AT8951 24PI, отечественным аналогом которого является микроконтроллер марки МК1816ВЕ51.
Микроконтроллер семейства АТ89 фирмы Atmel представляет собой восьмиразрядную однокристальную микроЭВМ с системой команд MCS-51 фирмы Intel. Микроконтроллеры изготавливаются по КМОП (CMOS) технологии и имеют полностью статическую структуру.
Базовая структура микроконтроллера совпадает с базовой структурой микроконтроллеров семейства MCS-51 и отечественных микроконтроллеров серий 1816/51 и 1830/51, однако микроконтроллеры многих типов содержат новые запоминающие и периферийные устройства, а некоторые устройства базовой структуры имеют иные характеристики. В таблице 1 перечислены характеристики микроконтроллера АТ89, указаны запоминающие и периферийные устройства, и некоторые узлы.
Основные характеристики микроконтроллера Таблица 1
|
Тип МК |
IROM |
IRAM |
IDROM |
EM |
I/O |
SP |
T/С |
IS |
IV |
SPI |
WDT |
AC |
DPTR |
|
АТ89С51 АТ89LV51 |
4K |
128 |
- |
+ |
32 |
+ |
2 |
6 |
5 |
- |
- |
- |
1 |
В число <старых> запоминающих устройств входят внутреннее постоянное запоминающее устройство (Internal ROM, IROM), предназначенное для хранения команд программы и констант, и внутреннее оперативное запоминающее устройство (Internal RАM, IRАM), предназначенное для хранения данных. IROM представляет собой репрограммируемое запоминающее устройство с электрическим стиранием записи, выполненное по Flash технологии. IROM выдерживает до 1000 циклов перепрограммирования. IRAM является статическим оперативным запоминающим устройством.
Микроконтроллеры некоторых типов имеют <новое> запоминающее устройство - внутреннее репрограммируемое запоминающее устройство для хранения данных (Internal Data ROM, IDROM).
В таблице 1 указана емкость названных запоминающих устройств (число восьмиразрядных ячеек памяти). К микроконтроллерам некоторых типов не может подключаться внешняя память (External Memory, EM). Отсутствие возможности подключения внешней памяти отмечено знаком <-> в колонке ЕМ в таблице 1.
К числу <старых> периферийных устройств относятся восьмиразрядные параллельные порты ввода-вывода Р0, Р1, Р2, Р3, последовательный порт SP, таймеры-счетчики Т/С0, Т/С1, Т/С2 и контроллер прерываний.
Микроконтроллеры некоторых типов содержат меньшее число параллельных портов, а некоторые порты имеют меньшее число входов-выходов. Суммарное число входов-выходов параллельных портов у микроконтроллера указано в таблице 1 в колонке I/O. У микроконтроллеров некоторых типов отсутствует таймер-счетчик Т/С2, при этом у некоторых микроконтроллеров отсутствует также таймер-счетчик Т/С1. Число таймеров-счетчиков у микроконтроллера указано в колонке Т/С в таблице 1.
Система прерываний имеет два уровня приоритета. Число источников запросов прерывания (Interrupt Source, IS) и векторов прерывания (Interrupt Vector, IV) их наличие или отсутствие указано в таблице 1 в колонках IS и IV соответственно. <Новыми> периферийными устройствами являются блок последовательного периферийного интерфейса (SPI), сторожевой таймер (WDT) и аналоговый компаратор (АС). Наличие у микроконтроллера названных устройств отмечено знаком <+> в таблице 1 в колонках SPI, WDT и АС соответственно.
Аналоговый компаратор сравнивает по величине напряжения сигналы, поступающие на входы Р1.0 и Р1.1. Результат сравнения подается на вход Р3.6, не имеющий внешнего вывода. Процессор у микроконтроллеров некоторых типов содержит два регистра-указателя данных - DPTR0 и DPTR1. Количество регистров-указателей данных у микроконтроллера указано в колонке DPTR в таблице 1.
Микроконтроллеры семейства AT89 выпускаются для работы при разных значениях напряжения питания и тактовой частоты, определяемой частотой подключенного к микроконтроллеру кварцевого резонатора. Диапазоны значений напряжения питания (Vcc) и тактовой частоты (Fosc) у микроконтроллера указаны в таблице 2. Ток потребления зависит от величины напряжения питания и тактовой частоты. В таблице 2 приведены значения тока потребления в рабочем режиме (Icc) при максимальном значении напряжения питания и Fosc=12 МГц.
Рабочие характеристики микроконтроллера Таблица 2
|
Тип МК |
Vcc (В) |
Fosc (МГц) |
Icc (мА) |
N |
|
АТ89С51 |
4,0-6,0 |
0-24 |
20 |
40 |
Кроме рабочего режима микроконтроллер может быть переведен в энергосберегающие режимы работы - режим холостого хода (Idle Mode) и режим пониженного энергопотребления (Power Down Mode).
В режиме холостого хода процессор остановлен, периферийные устройства продолжают работать, коды в IRAM сохраняются. Ток потребления уменьшается в 4-5 раз. Перевод в режим холостого хода выполняется по команде в программе, выход из режима - по сигналу сброса или при поступлении любого разрешенного запроса прерывания.
В режиме пониженного энергопотребления остановлен генератор тактового сигнала, коды в IRAM сохраняются. Ток потребления имеет величину 20-100 мкА. Перевод в режим пониженного энергопотребления выполняется по команде в программе, выход из режима - по сигналу сброса. Микроконтроллеры типов S53, LS53, S8252 и LS8252 выходят из режима также при поступлении внешнего запроса прерывания.
Микроконтроллеры выпускаются в корпусах разных типов с разным числом выводов, при этом число выводов, используемых для подключения микроконтроллера к схеме устройства, может отличаться от числа выводов корпуса. В таблице 2 указано число выводов (N), используемых для подключения микроконтроллера к схеме устройства.
Микроконтроллеры, имеющие N=20, выпускаются в корпусах PDIP20 и SOIC20. Микроконтроллер типа AT89S4D12 выпускается в корпусах SOIC28 и PLCC32, а микроконтроллеры остальных типов - в корпусах PDIP40, PLCC44, PQFP44, TQFP44.
Все микроконтроллеры семейства АТ89 программируются и перепрограммируются пользователем. Кроме того, фирма Atmel выпускают аналоги микроконтроллеров типов АТ89С51 и АТ89С52, которые программируются по заказу покупателя на предприятии-изготовителе (микроконтроллеры типов AT80F51 и AT80F52 соответственно) или допускают лишь однократное программирование пользователем (микроконтроллеры типов AT87F51 и AT87F52 соответственно). [16,17]
Блок-схема алгоритма для программирования микроконтроллера приведена в приложении.
Блок индикации режима работы микроконтроллера можно спроектировать на базе порта Р1.0 микроконтроллера. Ток с этого порта необходимо усилить, что делает транзистор VT5, и подать через светодиод VD9, который и будет сигнализировать о режиме работы.
Блок принудительного сброса необходим для устранения режима неуверенной работы. Он состоит из конденсатора C21, кнопки сброса SB1 и резистора R19.
Прибор должен иметь выход на базе последовательного интерфейса RS-232.
Хотя параллельный интерфейс для сопряжения различных устройств проще в реализации и требует меньшего объема аппаратных средств, последовательный интерфейс более универсален. [ 1]
В случае последовательного интерфейса все разряды передаются по одному проводу. Мы можем контролировать любой разряд, зная его положение в последовательном потоке данных, а также его длительность. В соответствии со сложившейся практикой первым в слове передается младший разряд. Для обеспечения правильности передачи обычно требуется выполнить процедуру квитирования установления связи между передатчиком и приемником.[1]
Протокол обмена данными между установкой и ЭВМ по интерфейсу RS-232 представлен на рисунке 16.
Р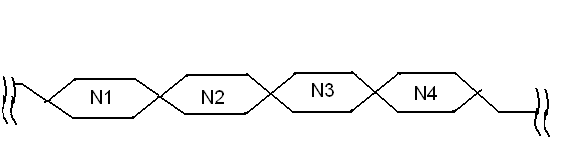 ис.
16 Протокол передачи данных по RS-232.
ис.
16 Протокол передачи данных по RS-232.
N1- байт синхронизации; N2 – байт направления движения стрелки динамометра; N3 – младший байт содержимого T/C0; N4 – старший байт T/C0. ( N3; N4) – число пропорциональное линейному удлинению образца.
Для стабилизации питания электрической схемы проектируемого прибора используется стабилизатор напряжения DA1.
Действие сглаживающего фильтра сводится к тому, что при понижении напряжения источника питания происходит зарядка конденсатора C8,С9, а при снижении напряжения происходит разрядка на нагрузку. Этим самым конденсаторы способствуют поддержанию среднего значения напряжения на нагрузке почти неизменной величины.
Полная принципиальная электрическая схема проектируемого прибора приведена на рисунке 15.