

Системы автоматического управления с ЦВМ
Литература:
Бесекерский В.А. Цифровые автоматические системы. М.: Наука, 1976.
Куо Б. Теория и проектирование цифровых систем управления. М.: Машиностроение, 1986.
Микропроцессорные системы автоматического управления. Под общ. ред. В.А. Бесекерского. Л.: Машиностроение, 1988.
Проектирование микропроцессорных систем автоматического управления. Ч.1. Синтез системы автоматического управления: Учеб. пособие/ Г.Г.Диркс, В.Г. Коломыцев; ПГТУ. Пермь, 1997.
Фёдоров С.М., Литвинов А.П. Автоматические системы с цифровыми управляющими машинами. М.-Л.: Энергия, 1965.
Теория автоматического управления. Под ред. В.Б.Яковлева. М.: Высшая школа, 2003.
Дорф Р., Бишоп Р. Современные системы управления. М.: Лаборатория базовых знаний. 2002.
Филлипс Ч., Харбор Р.Системы управления с обратной связью. М.: Лаборатория Базовых Знаний, 2001.
В многорежимных и многомерных САР, в системах с перестраиваемой структурой, многосвязных, высокоточных и многих других видах САУ получили широкое применение цифровые вычислительные машины.
ЦВМ выполняют функции задатчиков, сравнивающих устройств, устройств коррекции, автоматических регуляторов с быстроперестраиваемыми программами, коммутаторов, управляющих автоматов и других устройств.
 Функциональная
схема САУ с ЦВМ
Функциональная
схема САУ с ЦВМ
АЦП обычно проектируют 10–20 разрядными, а ЦАП можно применить с пониженной разрядностью (не менее 7), так как входной сигнал ЦАП имеет малое число двоичных разрядов.
Применение микроЭВМ позволяет:
упростить САУ путём применения простых и надёжных модулей;
расположить цифровую вычислительную часть системы в непосредственной близости от основных элементов канала управления;
сложную обработку поступающей информации;
решение нескольких задач при обслуживании разных каналов управления с разделением во времени поступающей для обработки информации;
реализовать практически любой алгоритм управления;
осуществлять операции оптимизации САУ по статическим и динамическим показателям качества;
проводить операции контроля и поиска неисправностей.

Структурная типовая схема ЦАС
Экстраполятор нулевого порядка
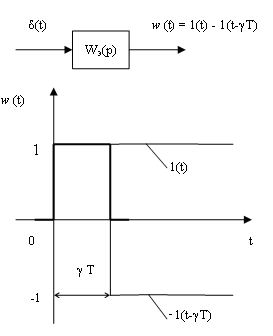
![]() ;
;
при =1![]() - передаточная функция экстраполятора
0-го порядка.
- передаточная функция экстраполятора
0-го порядка.
Т – такт работы ЦВМ по преобразованию информации (0,011с).
![]() - передаточная
функция ЦВМ, учитывающая временное
запаздывание сигнала при прохождении
по каналу АЦП–процессор–ЦАП; учитывается
в W0(p);<<T(1мс);
- передаточная
функция ЦВМ, учитывающая временное
запаздывание сигнала при прохождении
по каналу АЦП–процессор–ЦАП; учитывается
в W0(p);<<T(1мс);
kАЦП– передаточный коэффициент АЦП;
k ЦАП– передаточный коэффициент ЦАП;
ЦАП– передаточный коэффициент ЦАП;
- (ИЭ1) идеальный импульсный элемент первого рода, который непрерывную функцию преобразует в решетчатую;
- (ИЭ2) идеальный импульсный элемент второго рода, преобразующий решетчатую функцию yм[n] в последовательность дельта-функций.
При проектировании цифровых систем автоматического управления стремятся выбрать период Т так, чтобы он был намного меньше основной постоянной времени непрерывной части системы.
Период квантования
Т можно определить с помощью приближенной
формулы: 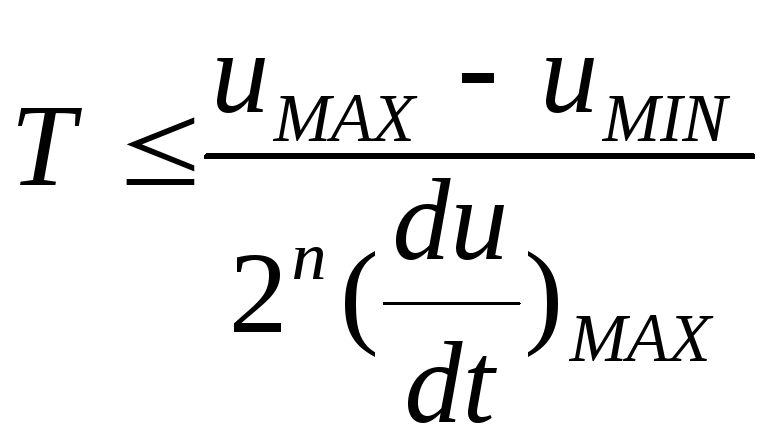 ,
,
где n – число двоичных разрядов;
![]() - максимальная
скорость изменения непрерывного сигнала.
- максимальная
скорость изменения непрерывного сигнала.
Квантование по времени - важнейший признак класса цифровых систем, а квантование по уровню – нелинейных систем.
В приближенных расчетах шумами квантования по уровню и нелинейностями статических характеристик АЦП и ЦАП пренебрегают.
Математическое описание работы идеального амплитудно–импульсного элемента в пространстве Фурье
 Преобразование
Фурье сигнала
Преобразование
Фурье сигнала![]()
имеет
вид
 ,
,
где r– номер гармоники,
![]() - частота квантования.
- частота квантования.

Неискаженная
информация получается, если
![]() .
.
При достаточно большой частоте импульсов, образующих выходной сигнал импульсного элемента, непрерывная часть системы реагирует только на низкочастотную составляющую сигнала, несущую информацию о непрерывном сигнале на входе импульсного элемента. Дискретность работы импульсного элемента обусловливает лишь в качестве побочного явления возникновение на выходе системы высокочастотной составляющей в виде помехи, частотный спектр которой кратен частоте f=1/Tимпульсного элемента.
Условие допустимости сведения импульсной системы к непрерывной
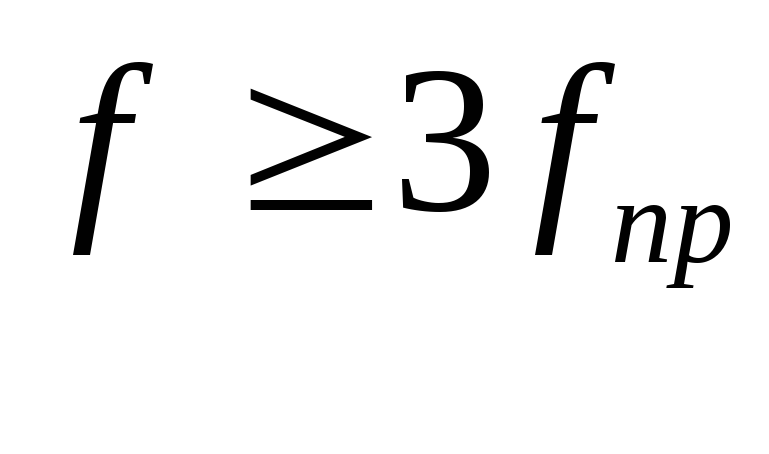 ,
,
где
 - наибольшая частота сигнала, пропускаемого
непрерывной частью системы, Гц.
- наибольшая частота сигнала, пропускаемого
непрерывной частью системы, Гц.
Расчет цифровых САУ следует вести так, чтобы выполнялись условия импульсной теоремы Котельникова – Шеннона:
«Для того чтобы передаваемая в виде импульсов информация могла быть воспроизведена без существенных искажений, наивысшая частота гармоник со значимыми амплитудами в спектре входного сигнала не должна превышать ½ частоты прерывания – частоты следования импульсов».
Разностные уравнения
Аналогом первой производной непрерывной функции для решетчатой функции является либо первая обратная разность
f[n] =f[n] -f[n-1],
либо первая прямая разность
f[n] =f[n+1] -f[n].
 Прямая
разность определяется в момент времениt=nTпо
будущему значению решетчатой функции
приt=(n+1)*Т.
Это можно сделать в тех случаях, когда
будущее значение известно.
Прямая
разность определяется в момент времениt=nTпо
будущему значению решетчатой функции
приt=(n+1)*Т.
Это можно сделать в тех случаях, когда
будущее значение известно.
Обратная разность определяется для момента времени t=nTпо прошлому значению решетчатой функции в момент времени (n- 1)*Т.
Аналогом второй производной служат вторые разности:
Обратная
![]() .
.
Для вычисления k-й разности используют рекуррентную формулу
![]()
или формулу общего вида
![]() , (1)
, (1)
где биномиальные
коэффициенты (число сочетаний)
![]() .
.
Обратные разности обладают важной особенностью: если решетчатая функция определена только для положительных значений аргумента, то есть
![]() при n<0,
то в точкеn=0k-я
разность
при n<0,
то в точкеn=0k-я
разность
![]()
для любого целого положительного k.
Аналогами интегралов непрерывных функций в пределах от 0 до tдля решетчатых функций являются неполные суммы
![]()
и полные суммы
![]() .
.
В качестве аналогов дифференциальных уравнений рассматриваются уравнения в конечных разностях.
При использовании обратных разностей уравнение в конечных разностях будет иметь вид
![]() .
.
С учетом формулы (1) последнее выражение приобретает вид
![]() ,
,
коэффициенты уравнения определяются выражениями
![]() ,
,
![]() .
.
Общее решение
однородного разностного уравнения при
некратных корнях характеристического
уравнения может быть записано следующим
образом:
![]() ,
(2)
,
(2)
где
![]() (i=1,2,…,m)
– корни характеристического уравнения
(i=1,2,…,m)
– корни характеристического уравнения
![]() ,
,
а
![]() - произвольные постоянные.
- произвольные постоянные.
Из (2) вытекает
условие того, чтобы свободное движение
системы, описываемой разностным
уравнением, было бы затухающим (условие
устойчивости): |![]() |<1 (i=1,2,…,m).
|<1 (i=1,2,…,m).
Для исследования решений разностных уравнений используются дискретное преобразование Лапласа, z– преобразование,w– преобразование, а также частотные методы.