

Шпоры / шпоры тау / 2006 г. ЭВТд-ТАУ / 9-2005г.CAУ с ЦВМ
.doc
Системы автоматического управления с ЦВМ
Литература:
-
Бесекерский В. А. Цифровые автоматические системы. М.: Наука, 1976.
-
Куо Б. Теория и проектирование цифровых систем управления. М.: Машиностроение, 1986.
-
Микропроцессорные системы автоматического управления. Под общ. ред. В. А. Бесекерского. Л.: Машиностроение, 1988.
-
Проектирование микропроцессорных систем автоматического управления. Ч. 1. Синтез системы автоматического управления: учеб. Пособие / Г. Г. Диркс, В. Г. Коломыцев; ПГТУ. Пермь, 1997.
-
Фёдоров С. М., Литвинов А. П. Автоматические системы с цифровыми управляющими машинами. М.-Л.: Энергия, 1965.
В многорежимных и многомерных САР, в системах с перестраиваемой структурой, многосвязных, высокоточных и многих других видах САУ получили широкое применение цифровые вычислительные машины.
МикроЭВМ выполняют функции задатчиков, сравнивающих устройств, устройств коррекции, автоматических регуляторов с быстроперестраиваемыми программами, коммутаторов, управляющих автоматов и других устройств.

Функциональная схема САУ с ЦВМ.
Применение микроЭВМ позволяет:
-
Упростить САУ путём применения простых и надёжных модулей;
-
Расположить цифровую вычислительную часть системы в непосредственной близости от основных элементов канала управления;
-
Сложную обработку поступающей информации;
-
Решения нескольких задач при обслуживании разных каналов управления с разделением по времени поступающей для обработки информации;
-
Реализовать практически любой алгоритм управления;
-
Осуществлять операции оптимизации САУ по статическим и динамическим показателям качества;
-
Проводить операции контроля и поиска неисправностей.

Структурная типовая схема ЦАС
T- такт работы ЦВМ по преобразованию информации (0,01÷1с);
![]()
W![]() τ(p)=
- передаточная
функция ЦВМ, учитывающая временное
запаздывание сигнала при прохождении
по каналу АЦП-процессор-ЦАП; учитывается
в ; τ<<T
(τ=1мс);
τ(p)=
- передаточная
функция ЦВМ, учитывающая временное
запаздывание сигнала при прохождении
по каналу АЦП-процессор-ЦАП; учитывается
в ; τ<<T
(τ=1мс);
Кацп – передаточный коэффициент АЦП;
Кцап- передаточный коэффициент ЦАП;
![]() -(ИЭ1) идеальный
импульсный элемент первого рода, который
преобразует непрерывную
-(ИЭ1) идеальный
импульсный элемент первого рода, который
преобразует непрерывную
функцию в решетчатую
![]()
-(ИЭ2) ) идеальный импульсный элемент второго рода, преобразующий решетчатую функцию yм[n] в последовательность дельта-функции.
При проектировании цифровых САУ стремятся выбрать период Т так, чтобы он был намного меньше основной постоянной времени непрерывной части системы.
Период квантования Т можно определить с помощью приближенной формулы:

, где n-число двоичных разрядов,
![]() -максимальная скорость
изменения непрерывного сигнала.
-максимальная скорость
изменения непрерывного сигнала.
Квантование по времени- важнейший признак класса цифровых систем, а квантование по уровню- нелинейных систем.
В приближенных расчетах шумами квантования по уровню и нелинейностями статистических характеристик АЦП и ЦАП пренебрегают.
Экстраполятор нулевого порядка



при =1 - передаточная функция
фиксирующего устройства нулевого порядка.
Математическое описание работы
модуляторов во временном пространстве
А налого-цифровой
модулятор.
Вид модуляции:
кодо-импульсная.
налого-цифровой
модулятор.
Вид модуляции:
кодо-импульсная.


![]()
![]() , где
.
, где
.
Условие допустимости сведения импульсной системы к непрерывной
 ,
,
где
 - наибольшая частота сигнала, пропускаемого
непрерывной частью системы, Гц.
- наибольшая частота сигнала, пропускаемого
непрерывной частью системы, Гц.
Расчет цифровых САУ следует вести так, чтобы выполнялись условия импульсной теоремы Котельникова – Шеннона:
«Для того чтобы передаваемая в виде импульсов информация могла быть воспроизведена без существенных искажений, наивысшая частота гармоник со значимыми амплитудами в спектре входного сигнала не должна превышать ½ частоты прерывания – частоты следования импульсов».
Аналогом первой производной непрерывной функции для решетчатой функции является либо первая обратная разность
 f[n]
= f[n]
- f[n-1].
f[n]
= f[n]
- f[n-1].
Аналогом второй производной служат вторые обратные разности:
![]() .
.
Обычно разностные уравнения записывают в виде
![]() ,
,
решают уравнения применением дискретного преобразования Лапласа, z- или ω-преобразований.
Для решётчатых функций введено понятие дискретного преобразования Лапласа в соответствии с формулой

z-преобразование
вытекает из дискретного преобразования
Лапласа путем введения новой переменной
![]() :
:

Цифровой И-регулятор
 Численное
интегрирование функции u(t)
при нулевых
начальных
Численное
интегрирование функции u(t)
при нулевых
начальных
 условиях
по методу Эйлера:
условиях
по методу Эйлера:
,
![]()
отсюда -рекуррентное уравнение при интегрировании входного воздействия.
П рименим
дискретное преобразование Лапласа:
рименим
дискретное преобразование Лапласа:

![]() отсюда
отсюда
Цифровой Д-регулятор
Численное дифференцирование функции u(t) при нулевых
начальных условиях методом простой разности

,отсюда

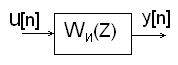
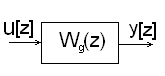
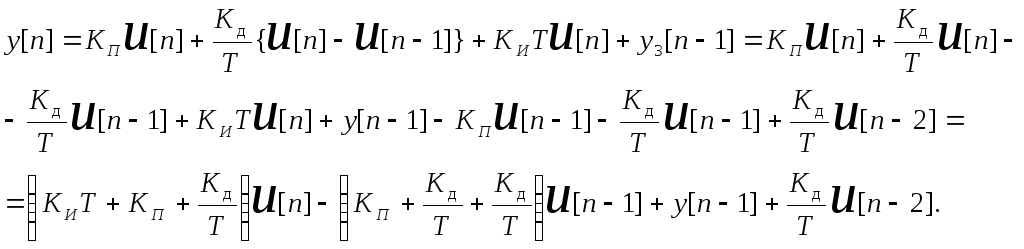
Цифровой ПИД-регулятор

Разностное уравнение регулятора:
![]() преобразование
разностного уравнения имеет вид
преобразование
разностного уравнения имеет вид
![]()
отсюда
![]()

откуда

где Т-такт квантования сигналов.