

Розанов учебник(ЭЭА) / GLAVA_9
.pdfà ë à â à ä å â ÿ ò à ÿ
СИСТЕМЫ УПРАВЛЕНИЯ СИЛОВЫМИ ЭЛЕКТРОННЫМИ АППАРАТАМИ
9.1.НАЗНАЧЕНИЕ И ОСНОВНЫЕ ПРИНЦИПЫ ФУНКЦИОНИРОВАНИЯ
9.1.1.ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ УПРАВЛЕНИЯ
Âсиловых электронных аппаратах и других уст-
ройствах принято различать силовую часть и систему управления (СУ). К силовой части относят электрические цепи и элементы, которые непосредственно участвуют в передаче электрической энергии от первичного источника к потребителю. Иногда эти цепи совместно с силовыми элементами называют главными, так как они определяют основные технико-экономические показатели устройства и, в первую очередь, его КПД. Силовая часть аппарата по существу является силовым исполнительным органом, определяющим главные функции аппарата. Например, силовая часть простейшего тиристорного реле постоянного тока (см. гл. 11) состоит из одного тиристора и электрических соединений, обеспечивающих его связь с коммутируемой электрической цепью.
Учитывая определяющее влияние силовой части на технико-экономические характеристики устройства в целом, ее изучению уделяется обычно основное внимание. Однако для функционирования силовых элементов схемы (транзисторов, тиристоров и других) необходимо подавать на них соответствующие сигналы управления. Эти сигналы формируются другой составной частью устройства – системой управления. В отличие от силовой части СУ в основном принимает, обрабатывает и выдает информацию. Поэтому СУ состоит в основном из элементов и функциональных узлов, связанных с информационными потоками. При этом уровень потребляемой энергии обычно стремятся по возможности снизить.
Система управления силового электронного устройства обычно выполняет следующие функции:
формирование сигналов управления силовыми элементами;
регулирование выходных параметров; включение и отключение по заданному алгоритму; обмен информацией с внешней средой.
Êсистеме управления относят также элементы
èузлы, обеспечивающие текущий контроль состояния устройства вцелом, диагностику отказов и управление защитными устройствами.
На рис. 9.1 приведена обобщенная структура СУ. В структуре выделены некоторые функциональные блоки, характерные для СУ силовых электронных устройств.
Рис. 9.1. Обобщенная структурная схема системы управления электронного аппарата
Блок датчиков Ä содержит датчики регулируемых и контролируемых параметров. Так как обычно регулируются выходные параметры, то часть датчи- ков непосредственно входит в обратную связь канала регулирования. Сигналы с этих датчиков поступают на регулятор ÐÅÃ, в функции которого входит формирование закона управления элементами силовой части. Блок ÔÈÓ формирует импульсы управления, непосредственно поступающие на силовые элементы. По существу ÔÈÓ является согласующим устройством между входами силовых приборов и выходом регулятора. Сигналы регулятора обычно являются маломощными и не отвеча- ют требованиям, предъявляемым к импульсам управления силовых приборов (тиристоров, транзисторов и др.). Блок ÔÈÓ называют также драйвером”. ”
Узлы СУ выполняются на различной элементной базе: дискретные и интегральные электронные компоненты, электромагнитные реле и др. Для функционирования этих элементов требуются источники электропитания. В составе структуры имеется блок вторичных источников питания для собственных нужд, называемых также источниками оперативного питания ÈÎÏ. Â ÈÎÏ используются различные виды преобразователей и регуляторов, согласующих параметры входного (иногда и выходного) напряжения силовых цепей с параметрами, требуемыми для питания элементов СУ.
243

Гл. 9. Системы управления силовыми электронными аппаратами
При питании от сети переменного тока основой ÈÎÏ обычно служат маломощные трансформаторы с несколькими вторичными обмотками на разные напряжения. Эти обмотки подключаются к выпрямителям с выходными, обычно емкостными, фильтрами. Для стабилизации уровней выходных напряжений маломощных выпрямителей используют стабилитроны или транзисторные регуляторы непрерывного действия в дискретном или интегральном исполнениях. В целях улучшения массогабаритных показателей получила распространение структура ÈÎÏ с бестрансформаторным входом. В этой структуре переменное напряжение силовой цепи непосредственно поступает на выпрямитель, выходное напряжение которого преобразуется инвертором в переменное напряжение повышенной частоты (обычно 20 кГц). Затем это напряжение трансформируется, снова выпрямляется и фильтруется. Трансформация и фильтрация при повышенных частотах позволяют существенно уменьшить массу и габаритные размеры ÈÎÏ.
При питании ÈÎÏ от силовых цепей постоянного тока постоянное напряжение также инвертируется на повышенной частоте в переменное, затем трансформируется, выпрямляется и фильтруется.
Текущий контроль и диагностика устройства осуществляется блоком ÓÊÄ, на вход которого поступают сигналы с датчиков контролируемых параметров.
Результаты контроля диагностики поступают на блок обработки информации ÈÍÔ и затем с его выхода – на защитные устройства ÇÓ. Áëîê ÈÍÔ также в общем случае может связывать все устройство со внешней средой. Например, в него могут
поступать сигналы команд на включение, выклю- чение, изменение режима работы. Обычно эти сигналы обрабатываются или транслируются непосредственно в блок коммутационной аппаратуры ÊÀ. С другой стороны из блока обработки информации могут исходить сигналы о состоянии устройства, режиме его работы, информация о причине отключения или срабатывания защит и др.
Представленная на рисунке структура является обобщенной. В ней отражены характерные укрупненные функциональные блоки. В реальном аппарате значительная часть из них может отсутствовать или находиться в неявном конструктивном или функциональном виде. Обмен с внешней средой может осуществляться посредством тумблеров или кнопок, а о состоянии аппарата будут давать информацию обыкновенные сигнальные лампы накаливания. Однако, для того чтобы понять принцип действия аппарата, его функции и возможности, необходимо уметь представить структуру СУ и ее функциональные узлы. При этом функциональная законченность узла или блока не обязательно имеет отдельную конструкцию в виде отдельной платы, модуля и др.
Так как силовые электронные аппараты обычно выполняются на электронных ключах, по принципу действия их СУ являются дискретными или импульсными. Соответственно элементная база СУ часто сочетает элементы как цифровой, так и аналоговой техники, обрабатывающей непрерывные сигналы, например, тока или напряжения. Эти сигналы затем снова могут преобразовываться в импульсную форму.
9.1.2. ОСНОВНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ ИМПУЛЬСНЫМИ СИСТЕМАМИ
Большинство силовых электронных аппаратов по принципу управления являются импульсными системами. Такое определение вытекает из импульсного характера функционирования основных элементов силовой части схемы – тиристоров, транзисторов и др.
Теория импульсных систем получила развитие в основном применительно к информационным системам. Многие положения этой теории оказались справедливыми и для импульсных энергети- ческих систем, к которым следует отнести большинство устройств силовой электроники. При их рассмотрении широко используются термины и определения, сформулированные значительно раньше, чем появились системы импульсного преобразования энергии.
В импульсных энергетических системах применяются элементы с дискретно изменяемыми пара-
метрами, например, проводимостью (сопротивлением). Кроме того, такие системы содержат также и непрерывную, обычно линейную часть, например фильтр, нагрузку и др. В электронных аппаратах импульсным элементом с дискретно изменяемым состоянием проводимости (сопротивления) являются электронные ключи. Периодическое изменение состояния ключей во многом аналогично квантованию сигналов информационных систем по уровню или времени. Квантование происходит дискретно, в определенные моменты времени, по определенным законам, характеризующим преобразование непрерывных сигналов в импульсные. При анализе импульсных информационных систем эти законы называют законами модуляции. Такая же терминология в основном сохранилась и для энергетических импульсных систем, в которых различа- ют следующие основные виды модуляций:
244
§ 9.1. Назначение и основные принципы функционирования
амплитудно-импульсную (АИМ); широтно-импульсную (ШИМ); частотно-импульсную (ЧИМ).
Существуют и другие способы модуляции, соче- тающие различные виды. Особо надо отметить широко применяющиеся релейные системы с квантованием по уровню. Но этот вид импульсных систем может быть отнесен также к разновидности импульсных систем, сочетающих ШИМ и ЧИМ.
Способы модуляции в энергетических импульсных системах, в отличие от информационных, обычно реализуют простые функции, например, постоянное значение выходного параметра, изменение его в соответствии с синусоидальной или линейной функцией и др.
Рассмотрим виды модуляции более подробно, полагая закон модуляции линейным. При этом будем считать, что в соответствии с терминологией, принятой в информационной импульсной технике, имеет место модуляция 1-го рода, когда модулируемые параметры определяются значениями модулирующего сигнала в фиксированные моменты времени, в частности, совпадающие с моментами переключения ключей из непроводящего состояния в проводящее. При модуляции 2-го рода модулируемый параметр может зависеть от разных зна- чений модулирующей функции на интервале переключения.
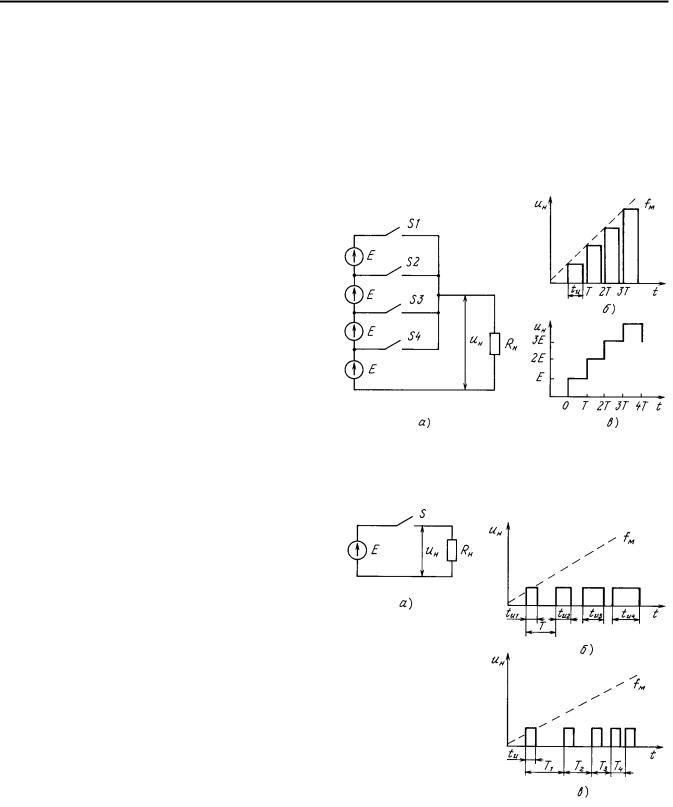
На рис. 9.2 приведены схема и диаграммы, поясняющие управление с АИМ. Модуляция в соответствии с функцией fì осуществляется переключе- нием ключей S1–S4 из одного состояния в другое с постоянной частотой f = 1/T в моменты T, 2T, 3T. При этом предполагается, что во включенном состоянии может находиться только один ключ S. Длительность включенного состояния постоянна и равна tè (ðèñ. 9.2,á). В результате переключений на выходе будет формироваться напряжение с различными амплитудами. Если длительность импульсов tè < T, то на выходе сформируется последовательность импульсов с амплитудами E, 2E, 3E è 4E. Ïðè tè = T напряжение на выходе будет соответствовать ступенчатой функции с пороговым значением E. Очевидно, что точная реализация линейного закона АИМ 1-го рода в данном случае может иметь место только при определенном соотношении E, tè, T и линейной модулирующей функции. Во всех остальных случаях точность, реализуемая АИМ 1-го рода будет приближенной.
Системы управления с АИМ относятся к линейным системам, для анализа которых справедливы принципы наложения или суперпозиции. Однако построение систем, реализующих изменение амп-
литуды импульсов, является непростой задачей. Например, для этой цели необходимо использовать первичный источник питания напряжением E с четырьмя выводами от отдельных секций (рис. 9.2,a). Кроме того, возможности управления в этом случае ограничены количеством коммутируемых секций и, соответственно, числом ключей S. Наиболее просто реализуется АИМ в аппаратах переменного тока переключением отпаек обмоток согласующих трансформаторов.
Рис. 9.2. Система управления с АИМ:
à – принципиальная схема; á – диаграмма работы при tè < T; â – диаграмма работы при tè = T
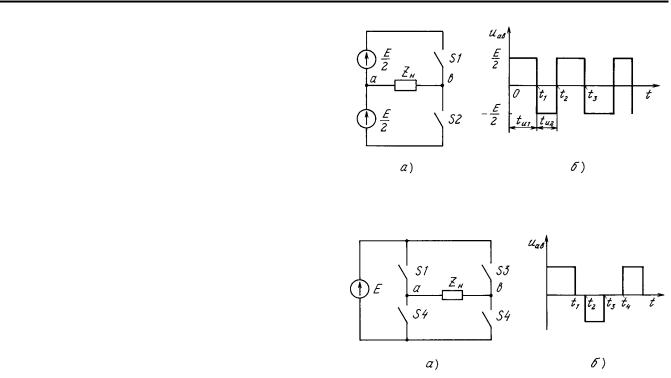
Рис. 9.3. Система управления с ШИМ:
à – принципиальная схема; á – диаграммы, соответствующие ШИМ; â – диаграммы, соответствующие ЧИМ
245

Гл. 9. Системы управления силовыми электронными аппаратами
Íà ðèñ. 9.3,à показана система управления с ШИМ и ЧИМ. При ШИМ ключ S переклю- чается с постоянной частотой f = 1/T, а длительность импульса tè, определяющего включенное состояние ключа, изменяется в соответствии со значением модулирующей функции fì (ðèñ. 9.3,á). В системах с ЧИМ изменяется частота переключе- ния ключа S, что соответствует изменению периода переключения ключа S согласно значениям функции fì (ðèñ. 9.3,â). Длительность импульса tè остается в этом случае постоянной. Так как изменение частоты связано с изменением фазы, то аналогич- ным образом может быть реализована фазоимпульсная модуляция (ФИМ). Системы управления с ШИМ получили наибольшее распространение в силовых электронных устройствах.
Требуемый закон управления иногда может быть реализован посредством релейной модуляции, со- четающей признаки ШИМ и ЧИМ. Этот принцип управления благодаря ряду преимуществ в техни- ческой реализации за последние годы стал широко использоваться в различных силовых электронных устройствах.
В качестве примера рассмотрим систему управления с релейной модуляцией, реализующую слежение” тока нагрузки за эталонным сигналом”i0(t), который может быть отнесен к модуляционной функции. Силовая часть схемы изображена на рис. 9.4,à. Ключи S1 è S2 синхронно переключаются – если один включен, то другой выключен и наоборот. На рис. 9.4,á представлена упрощенная структура реализации переключений ключей S1 è S2.
Рис. 9.4. Система управления с релейным регулированием:
à – принципиальная схема; á – структурная схема модулятора; â – характеристика гистерезисного элемента; ã – диаграммы работы
246
§ 9.2. Приближенное моделирование регуляторов
Åñëè êëþ÷ S1 включен, а ключ S2 выключен, то ток ií нарастает под воздействием напряжения E. При альтернативном состоянии ключей ток ií спадает. Индуктивность Lí определяет инерционность этих процессов. Моменты переключения S1, S2 определяются шириной ± ∆ε гистерезисного элемента ÃÝ, характеристика которого показана на рис. 9.4,â. Компаратор ÊÎÌ сравнивает мгновенное значение тока ií с эталонным i0 и, когда разность этих сигналов превышает величину ∆ε , происходит переключение состояния ключей S1 è S2 (ñì. ðèñ. 9.4,ã). Гистерезисный элемент ÃÝ является существенным элементом системы, так как определяет точность слежения за эталонным сигналом и частоту переключений. Очевидно, что частота переключений будет зависеть также от скорости изменения эталонного сигнала di0 ⁄ dt и постоянной времени инерционной цепи
нагрузки τ í = Lí ⁄ Rí. Этот способ называют также
гистерезисной модуляцией èëè дельта-модуляцией. Кроме рассмотренных видов модуляции суще-
ствует большое разнообразие их модификаций.
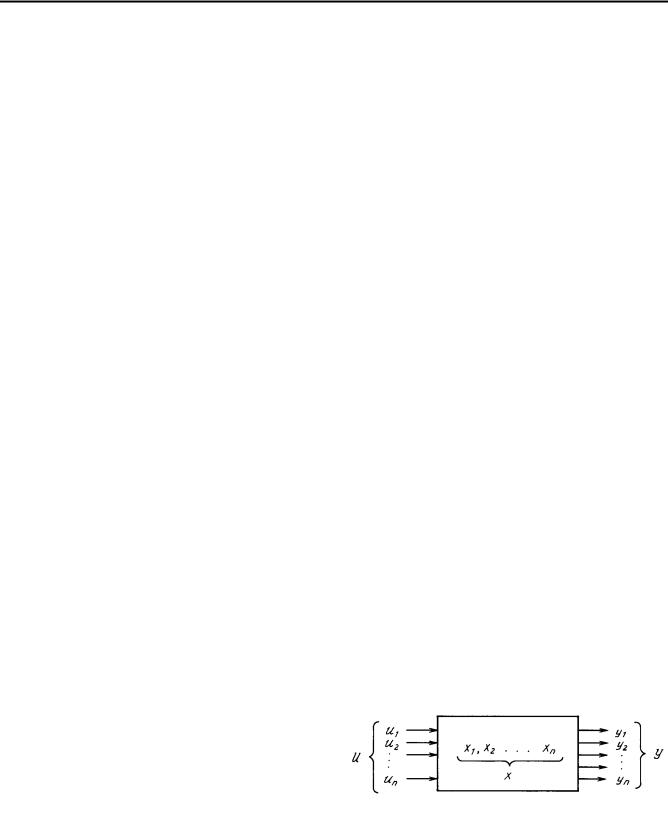
Âчастности, в силовой электронике широко используется модуляция разнополярных импульсов. Эту разновидность модуляции иногда называют двухили трехпозиционной в зависимости от топологии силовой схемы. Система управления с двухпозиционной модуляцией в схеме с нулевым выводом в цепи питания и диаграмма выходного напряжения
Uab представлены на рис. 9.5. На этой схеме в проводящем состоянии находится всегда один из клю- чей S1 èëè S2. Такой режим может возникать при
активно-индуктивном сопротивлении Zí и ключах, способных проводить ток в двух направлениях. При этом может изменяться по определенному закону длительности проводящих состояний время tu1 è tu2.
Âрезультате значение напряжения на нагрузке Uab
может изменяться с + E ⁄ 2 íà − E ⁄ 2 и наоборот. На рис. 9.6 показаны мостовая схема и диаграмма, поясняющие трехпозиционную разновидность модуляции. В этой схеме возможно обеспечить три уровня напряжения Uab − 0, + E è − E. Нулевая пауза обеспечивается при проводящем состоянии одной из пар ключей – S1, S3 è S2, S4 и условии выключенного состояния другой пары.
В системах с программным управлением, например содержащих микропроцессор, возможна реализация более сложных законов управления силовым
Рис. 9.5. Система управления с двухпозиционной модуляцией: à – принципиальная схема; á – диаграммы работы
Рис. 9.6. Система управления с трехпозиционной модуляцией: à – принципиальная схема; á – диаграммы работы
электронным ключом, чем в рассмотренном выше виде модуляции. Эти законы должны соответствовать стратегии оптимального управления. Учитывая, что импульсные системы, за исключением систем с ÀÈÌ, являются существенно нелинейными, определение законов оптимального управления является сложной задачей. Решение ее обычно можно получить, применяя специальные методы теории нелинейных цепей [84]. Особенно решение подобных задач затруднительно для многоконтурных систем управления со значительным количеством переменных. Перспективным направлением в решении подобных задач является использование методов нечеткой логики (англ. – ”fuzzy logic”). Методы этой логики не требуют создания сложных аналитических моделей системы и базируются на математической обработке простейших функций. Такие функции соответствуют набору правил и инструкций, сформулированных для конкретной системы в виде высказываний: много”, мало”, ”åñëè ... òî ...” è äð. [85]. ” ”
247
Гл. 9. Системы управления силовыми электронными аппаратами
|
Контрольные вопросы и задачи |
|
1. |
Изобразите упрощенную электрическую схему, |
дальное изменение среднего значения выходного |
|
состоящую из реле и кнопок управления, которая |
напряжения по синусоидальному закону с часто- |
|
бы обеспечивала поочередное включение трех |
той, в 10 раз превышающей рабочую частоту |
|
независимых электрических цепей и отключение |
формирования импульсов. |
|
их в обратном порядке. |
4. Нарисуйте структурную схему устройства защиты, |
2. |
Начертите диаграмму распределения импульсов |
обеспечивающего отключение аппарата от первич- |
|
управления тиристорами встречновключенных |
ного источника питания при отклонениях от уста- |
|
в цепь переменного тока и структурную схему |
новленной нормы значений входного и выходного |
|
СУ, их реализующую. |
напряжения аппарата и тока его нагрузки. |
3. |
Запишите закон изменения длительности им- |
5. Перечислите основные функции систем управле- |
|
пульсов при ШИМ, обеспечивающей синусои- |
ния силовых электронных устройств. |
9.2.ПРИБЛИЖЕННОЕ МОДЕЛИРОВАНИЕ РЕГУЛЯТОРОВ
9.2.1.ОБЩИЕ СВЕДЕНИЯ О МОДЕЛИРОВАНИИ РЕГУЛЯТОРОВ
Практически все дискретные системы, за исключением систем с АИМ, являются нелинейными. Поэтому точные методы анализа протекающих в них процессов достаточно сложны и мало пригодны в инженерной практике. При проектировании обычно используют различные приближенные модели, позволяющие оценить те или иные аспекты функционирования устройства. Например, при синтезе звеньев каналов регулирования необходимо моделировать силовую часть импульсного регулятора. Такая модель должна отражать процессы, связанные с качеством регулирования конкретных параметров проектируемого устройства. Степень адекватности модели или ее точности зависит от решаемой задачи. Обычно на разных этапах разработки используют модели различной точности. На ранних этапах проектирования достаточно иметь модель, приближенно отражающую основные свойства объекта. Затем по мере детализации проекта используют более точные модели. Рассмотрим некоторые используемые на практике принципы приближенного моделирования силовой части импульсных регуляторов.
Наиболее распространенными методами моделирования импульсных регуляторов являются различные модификации метода осреднения переменных состояния. Эти модели основаны на анализе процессов при малых значениях сигналов управления и возмущения и часто называются малосигнальными [91]. Эффективность их различается в зависимости от решаемой задачи. Однако все они позволяют не только дать оценку объекта регулирования, но и в ряде случаев – достаточно точное представление о протекающих в них процессах.
Приближенные модели могут успешно использоваться на этапах проектирования, когда синтезируются отдельные звенья регулятора и корректируются его характеристики.
Описание объекта регулирования в векторноматричной форме, связывающей входные и выходные переменные с переменными, характеризующими внутреннее его состояние, широко используется в современной теории управления. Известно, что динамические процессы любого объекта могут быть описаны системой дифференциальных уравнений различных видов. В рассматриваемых случаях состояния системы могут быть описаны системой обыкновенных дифференциальных уравнений в нормальной форме, в которой каждое уравнение содержит только первую производную соответствующей переменной. Таким образом, уравнение n-го порядка сводится к системе из n уравнений, включающих такое же число переменных и их производных. Число переменных n полностью характеризует динамическое состояние объекта. На рис. 9.7 представлен в обобщенной форме объект управления и соответствующие ему переменные, кото-
Рис. 9.7. Обобщенная модель объекта управления
248
§ 9.2. Приближенное моделирование регуляторов
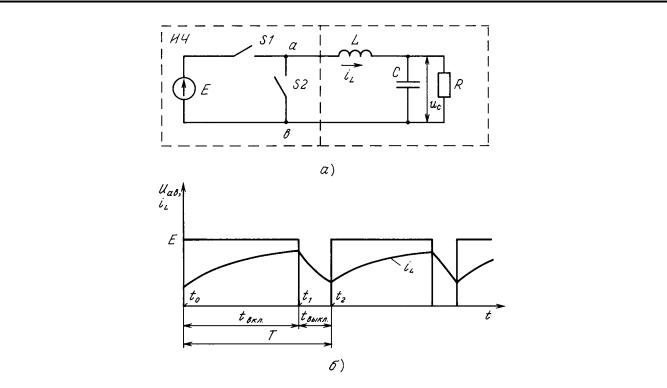
Рис. 9.8. Простейший импульсный регулятор напряжения:
à – принципиальная схема; á – диаграммы тока и напряжения
рые обычно записываются в векторно-матричной форме:
входные |
|
|
|
|
|
|
|
u1 |
|
|
|
|
|
u |
|
|
|
U = |
|
2 |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
un |
|
|
|
|
|
|
|
|
|
выходные |
|
|
|
|
|
|
|
y1 |
|
|
|
|
|
y2 |
|
|
|
Y = |
|
|
; |
(9.1) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
yn |
|
|
|
|
|
|
|
|
|
переменные состояния |
|
|
|
||
|
|
x1 |
|
|
|
|
|
x |
|
|
|
X = |
|
2 |
|
|
|
|
|
. |
|
||
|
|
|
|
|
|
|
|
xn |
|
|
|
|
|
|
|
|
|
Для стационарной линейной системы связь между этими переменными может быть представлена в общем виде
dX |
= |
X = |
AX + BU; |
(9.2) |
dt |
|
CX + |
|
|
Y = |
|
DU, |
|
ãäå A – матрица коэффициентов состояния; B – матрица управления; C – матрица выхода; D – матрица обхода системы.
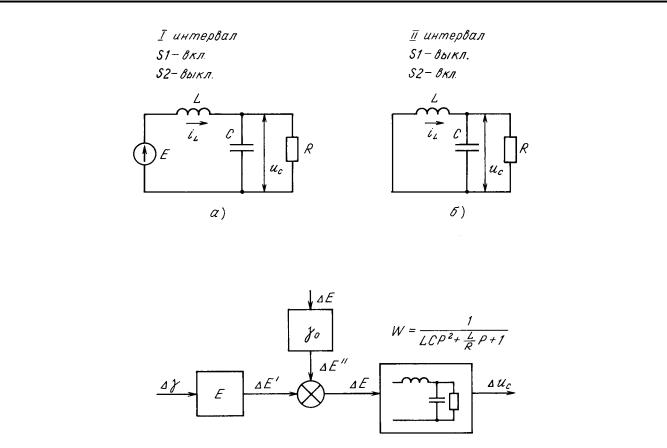
Особенностью большинства силовых электронных регуляторов импульсного типа является то, что они изменяют свою структуру при коммутации ключевых элементов. Поэтому они не могут быть описаны одной системой дифференциальных уравнений в нормальной форме. Более того, структура регулятора может изменяться в зависимости от режима работы устройства. В результате каждой структуре соответствует свое уравнение переменных состояния. По этой причине и разработан метод осреднения переменных состояния и его модификации, который позволяет приближенно учесть изменение структуры в процессе работы устройства. Рассмотрим использование этого метода на примере простейшей схемы двухключевого регулятора выходного напряжения (рис. 9.8,à). Более подробно этот тип регулятора рассматривается в (11.2).
249

Гл. 9. Системы управления силовыми электронными аппаратами
9.2.2. ПРИМЕР МОДЕЛИ ИМПУЛЬСНОГО РЕГУЛЯТОРА
В силовой части регулятора можно выделить импульсную часть ИЧ с ключевыми элементами S1 è S2 и непрерывную часть, включающую LC-фильтр и сопротивление нагрузки R. Управление регулятором осуществляется по способу ШИМ периодическим переключением элементов S1 è S2, которое происходит синхронно. При этом проводящее состояние S1 соответствует выключенному состоянию S2 и наоборот. На рис. 9.8,á представлены диаграммы напряжения на входе фильтра Uab, где время tâêë = t1 − t0 соответствует замкнутому сос-
тоянию ключа S1, а интервал tâûêë = t2 − t1 – разомкнутому на интервале периода T. В рассматриваемом примере будем считать, что схема работает в режиме непрерывного тока iL в реакторе фильтра с индуктивностью L (ðèñ. 9.8,á). В этом режиме на интервале периода имеют место две структуры, которым соответствуют схемы замещения на рис. 9.9 в зависимости от состояний ключей S1 è S2.
Каждая эквивалентная схема является линейной и может быть описана системой уравнений состояния. Для электрических схем в качестве переменных состояния обычно принимают токи индуктивных элементов и напряжения на емкостных элементах. Поэтому выбираем для эквивалентных схем следующие переменные состояния
|
|
|
|
X = |
|
x |
|
= |
|
u |
|
|
|
|
(9.3) |
|
|
|
|
|
|
1 |
|
|
c |
. |
|
|
|
||||
|
|
|
|
|
|
|
x |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
L |
|
|
|
|
||||
Для схемы на рис. 9.9,a уравнения состояния, |
||||||||||||||||
записанные в форме (9.2), имеют вид |
|
|
|
|
||||||||||||
dX |
|
|
d |
|
uc |
|
− 1 ⁄ RC 1 |
⁄ C |
|
uc |
|
|||||
dt |
= |
|
|
|
iL |
|
= |
− 1 ⁄ L |
|
|
|
|
+ |
|||
|
dt |
0 |
||||||||||||||
|
|
|
|
|
|
|
iL |
|
||||||||
|
|
|
|
|
+ |
|
0 |
|
|
|
0 |
|
|
|
|
(9.4) |
|
|
|
|
|
|
1 ⁄ L |
|
|
E |
. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Согласно (9.2–9.4) |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
A = − 1 ⁄ RC 1 ⁄ C |
; B = [ 0 − 1 ⁄ L] T; |
|||||||||||||
|
|
|
|
|
− 1 ⁄ L |
|
0 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
U = |
[ |
0 |
|
E ] T. |
|
|
|
|
|
В качестве переменной выхода принимаем напряжение на сопротивлении R, совпадающее с uC. Поэтому второе уравнение в (9.2) преобразовано
â Y = uC.
Для схемы на рис. 9.9,á при тех же переменных состояния uC è iL имеем то же значение матрицы A. В то же время сигнал управления U становится равным нулю, так как во включенном состоянии ключа S2 и выключенном состоянии ключа S1 источник напряжения E в схему не входит.
Процессы в регуляторе соответствуют схеме замещения на рис. 9.9,à в течение tâêë и схеме заме-
щения на рис. 9.9,á в течение tâûêë = T − tâêë. Для анализа динамических процессов по методу осреднения вводится коэффициент относительной длительности этих интервалов времени
γ = |
tâêë |
. |
(9.5) |
|
|||
|
T |
|
|
Коэффициент γ при управлении по способу ШИМ принято также называть коэффициентом заполнения.
При анализе систем с импульсным регулированием используется принцип осреднения, который заключается в том, что для описания системы регулирования с разными структурами создается одна осредненная система уравнений состояния. Эта осредненная система учитывает уравнения всех структур с весовыми коэффициентами, соответствующими относительной длительности существования этих структур в течение одного периода. Для рассматриваемого случая осредненная система уравнений состояния записывается в следующем виде
X = AñðX + BñðU =
= [ A1γ + A2(1 − γ) ] X + [ B1γ + B2(1 − γ) ] U , (9.6)
ãäå Añð è Bñð – матрицы осредненной системы переменных состояния; A1, B1 è A2, B2 – матрицы систем уравнений состояния на интервалах tâêë è tâûêë (ðèñ. 9.8,á), соответствующие эквивалентным схемам на рис. 9.9.
Учитывая (9.4)–(9.6), посредством несложных преобразований (9.6) можно представить в форме
d |
|
uC |
= |
− 1 ⁄ RC |
1 |
⁄ C |
|
uC |
+ |
||
|
|
|
|
− 1 ⁄ L |
|
0 |
|
|
|
||
|
|
||||||||||
dt |
iL |
|
|
|
|
|
iL |
|
|||
+ |
|
0 |
|
o |
(9.7) |
|
|
|
. |
||
|
|
1 ⁄ L |
|
γ E |
|
Уравнения (9.4) и (9.7) в данном примере разли- чаются только наличием коэффициента γ в матрице входных параметров. Однако, оно учитывает переменную структуру регулятора, обусловленную коммутацией ключей S1 è S2. Точность этой модели в основном определяется уровнем пульсаций выходного напряжения (напряжения на конденсаторе uC). Чем меньше будет уровень пульсаций, тем более адекватно модель (9.7) будет отражать процессы в реальной схеме. Физический смысл этой закономерности заключается в том, что при пренебрежении пульсациями переходят к анализу схемы методом основных (средних) составляющих напряжений и токов в схеме. При использовании этого
250
§ 9.3. Интегральные микросхемы в системах управления
Рис. 9.9. Схемы замещения регулятора:
à – êëþ÷ S1 включен; á – êëþ÷ S1 выключен
Рис. 9.10. Структурная схема регулятора относительно сигналов управления и возмущения
метода импульсная часть источника может быть заменена эквивалентным управляемым источником среднего напряжения Eñð = Eγ . Изменение этого напряжения происходит либо при изменении значения E или коэффициента γ , который определяется законом регулирования.
Система (9.7) является нелинейной, так как в нее входит произведение двух переменных Eγ . Однако, линеаризуя ее для малых отклонений параметров, можно получить передаточные функции силовой части регулятора, используя классические методы анали за линейных систем регулирования [91]. Для этого представим основные параметры схемы в виде
uC = |
UC + |
∆ uC; |
|
e = |
E + |
∆ e; |
(9.8) |
iL = |
IL + |
∆ iL; |
|
γ = |
γ 0 + |
∆ γ . |
|
В (9.8) каждый параметр представлен установившимся значением (постоянной составляющей) временных функций в конкретном исследуемом режи-
ме и малосигнальными отклонениями от них, т. е. ∆ f ⁄ F << 1, ãäå F è ∆ f – постоянные составляющие и малосигнальные отклонения.
После подстановки (9.8) в (9.7), пренебрегая величинами более высоких порядков малости, например ∆ e∆ γ , получим уравнения, позволяющие промоделировать связь параметров схемы как в установившемся режиме (для постоянного тока), так и создать малосигнальную модель для переменного тока, которая описывается уравнением
d |
|
uC |
= |
− 1 ⁄ RC |
1 |
⁄C |
|
∆ uC |
+ |
||
|
|
|
|
− 1 ⁄ L |
|
0 |
|
|
|
||
|
|
||||||||||
dt |
iL |
|
|
|
|
|
∆ iL |
|
|||
+ |
|
0 |
|
0 |
0 |
|
(9.9) |
|
|
|
|
|
. |
||
|
|
1 ⁄ L |
E∆ γ |
∆ Eγ 0 |
|
||
Следует отметить, что если какие-либо элементы схемы имеют нелинейности, например, характерную для реакторов с магнитопроводом нелинейную зависимость L = f(i), или другие, то можно ее учитывать классическим методом линеаризации посредством разложения нелинейной функции в ряд Тейлора.
251

Гл. 9. Системы управления силовыми электронными аппаратами
Используя |
преобразование Лапласа, из (9.9) |
9.10. В этой схеме передаточная функция звена, |
|||||||||
можно получить передаточные функции, связы- |
включающего LC-фильтр и нагрузку R, соответст- |
||||||||||
вающие изображения сигналов возмущения, управ- |
вует типовому звену 2-го порядка. Звенья, связы- |
||||||||||
ления и выхода регулятора. Допустим, что регуля- |
вающие линеаризованные сигналы управления ∆ γ |
||||||||||
тор работает с постоянной нагрузкой, когда R = |
и возмущения ∆ E с выходными сигналами ∆ E ′ |
||||||||||
= const. Тогда основным возмущающим фактором |
è ∆ E ′′ соответственно (рис. 9.10), являются безы- |
||||||||||
является изменение |
|
входного напряжения ∆ E. |
|||||||||
|
нерционными. Поэтому их передаточные функции |
||||||||||
В этом случае практический интерес представляют |
|||||||||||
представлены согласно (9.9) статическими коэффи- |
|||||||||||
следующие передаточные функции для рассматри- |
|||||||||||
циентами E è γ 0. |
|||||||||||
ваемой схемы: |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
В рассмотренном примере получена приближен- |
||
по возмущению |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
ная модель импульсного регулятора для режима |
||||
|
|
|
|
|
|
|
|
|
|
||
WE (p) = |
|
∆ uC(p) |
= |
|
γ 0 |
|
|
|
работы с непрерывным током i . При работе схемы |
||
|
|
|
|
|
, |
L |
|||||
|
∆ E(p) |
LCp2 + |
Lp ⁄ R + |
1 |
в режиме прерывистых токов (см.( 11.2) за один |
||||||
по управлению |
|
|
|
|
|
(9.10) |
период коммутации ключей S1 è S2 схема трижды |
||||
|
|
|
|
|
изменяет свою структуру. Для этого режима осред- |
||||||
|
|
∆ uC(p) |
|
|
|
E |
|
|
|
||
Wγ( p) = |
|
|
|
|
|
|
|
ненная система уравнений состояния будет значи- |
|||
|
∆ γ (p) |
= |
LCp2 + |
Lp ⁄R + |
1 . |
||||||
|
тельно отличаться от (9.9). Более точный метод |
||||||||||
Передаточным функциям (9.10)–(9.11) соответ- |
анализа линеаризованных систем с ШИМ рассмот- |
||||||||||
ствует структурная схема, представленная на рис. |
ðåí â [90]. |
||||||||||
Контрольные вопросы и задачи
1.Чем обусловлена нелинейность большинства типов импульсных регуляторов, в чем она проявляется и почему к нелинейным системам не применимы основные методы анализа линейных систем?
2.Запишите систему уравнений переменных состояния в векторно-матричной форме для схемы, состоящей из источника напряжения E и подключенного к нему контура последовательно соединенных R, L è C.
3.Запишите уравнения постоянного тока для схемы на рис. 9.9,a, используя (9.9), т. е. устано-
вившегося режима работы с заданными значе- ниями E è γ 0 ïðè ∆γ è ∆ E, равными нулю, используя (9.9) и схему рис. 9.9.
4.Запишите уравнения осредненных переменных состояния для схемы на рис. 9.8,a, дополненной
активным сопротивлением RL, последовательно соединенным с индуктивностью L.
5.Дополните структурную схему на рис. 9.10 типовыми звеньями отрицательной обратной связи по выходному напряжению (в общем упрощенном виде).
9.3.ИНТЕГРАЛЬНЫЕ МИКРОСХЕМЫ В СИСТЕМАХ УПРАВЛЕНИЯ
9.3.1.ОБЩИЕ СВЕДЕНИЯ ОБ ИНТЕГРАЛЬНЫХ МИКРОСХЕМАХ
Большинство узлов систем управления выполняет функции формирования и преобразования по определенным законам электрических сигналов информационного уровня. В целях повышения КПД и уменьшения массогабаритных показателей системы управления, стремятся к снижению мощности сигналов, преобразуемых и вырабатываемых системой управления. Эта тенденция привела к широкому использованию в узлах систем управления интегральных микросхем (ИМС).
Интегральные микросхемы представляют собой микроэлектронные устройства с высокой плотностью компановки элементов: транзисторов, диодов, резисторов, конденсаторов и др. Номенклатура ИМС определяется их функциями и масштабом производства. Наиболее широко употребляемые массовые ИМС можно отнести условно к группе
базовых ИМС. По желанию заказчика могут создаваться ИМС со специализированными функциями. Такие ИМС называют ”заказными” и целесообразность их применения зависит от технико-экономи- ческих факторов.
По технологии изготовления различают полупроводниковые, пленочные и гибридные ИМС. В основе полупроводниковых ИМС лежит кристалл полупроводника, в котором выполнены все элементы микросхемы. Пленочные ИМС выполнены в виде пленок проводящих и непроводящих материалов. Гибридные содержат более сложные компоненты (например несколько полупроводниковых кристаллов в одном корпусе).
По функциональному назначению микросхемы принято разделять на аналоговые и цифровые. Особенностью цифровых ИМС является то, что обра-
252