

Розанов учебник(ЭЭА) / GLAVA_2
.pdf§ 2.1. Коммутация электрической цепи
Рис. 2.14. Характеристики дугогасительных устройств (à) и динамическая характеристика дуги переменного тока (á)
íà ðèñ. 2.14,á. Статическая характеристика, в отли- чие от динамической, соответствует условиям неизменяющегося во времени тока.
Дифференциальное уравнение динамической характеристики дуги имеет вид
|
1 |
|
diä |
− |
1 |
|
dUä |
= |
1 |
Uäiä − P0lä |
, |
|
iä dt |
|
Uä dt |
θ P0lä |
|||||||
ãäå t – время; υ |
– тепловая постоянная времени |
||||||||||
äóãè; P0 – удельная, на единицу длины отводимая от дуги мощность; lä – длина дуги.
Присущая столбу дуги восстанавливающаяся прочность определяется в критических условиях динамического режима, когда подводимая к дуге
мощность U 2ä ⁄ Rä становится равной отводимой мощности P0lä. Тогда напряжение дуги равно восстанавливающейся прочности
Uâ.ï = √P0läRä .
Измеренная для аппаратов переменного тока низкого напряжения восстанавливающаяся проч- ность после перехода тока через нуль выражается эмпирической формулой [31]:
Uâ.ï(t) = U â.ï0 + kït , |
(2.28) |
ãäå kï – скорость роста прочности межконтактного промежутка.
Экспериментальные зависимости начальной восстанавливающейся прочности U 0â.ï открытой дуги для контактов из разных материалов приведены на рис. 2.15. Для аппаратов низкого напря-
жения kï = (1÷ 4) Â/ìêñ.
Способы воздействия на электрическую дугу в коммутационных аппаратах. Цель воздействия на столб возникающей в аппарате дуги состоит в увеличении ее активного электрического сопротивления вплоть до бесконечности, когда коммутационный орган переходит в изоляционное состояние. Практически всегда это достигается путем интенсивного охлаждения столба дуги, уменьшения ее температуры и теплосодержания, в результате чего снижается степень ионизации и количество носителей электричества и ионизированных частиц и повышается электрическое сопротивление плазмы.
Основные способы воздействия на столб дуги в коммутационных аппаратах сводятся к следующему:
Рис. 2.15. Начальная восстанавливающаяся прочность для разных контактных материалов в функции тока открытой дуги:
1 |
– Ag; 2 – латунь; 3 – Ag-Ni (40%); 4 – Cu; 5 – Ag-W (50%); 6 – Ag-CdO (15%); |
7 |
– Ag-C (3%); 8 – Al; 9 – Fe |
67

Гл. 2. Основные электрические и электромеханические процессы
увеличению длины столба дуги путем его растяжения или увеличения числа разрывов на полюс выключателя;
перемещению дуги на металлические пластины дугогасительной решетки, которые являются радиаторами, поглощающими тепловую энергию столба дуги;
перемещению столба дуги магнитным полем в щелевую камеру из дугостойкого изоляционного материала, где дуга интенсивно охлаждается изоляционными стенками;
образованию дуги в трубке из газогенерирующего материала, например, фибры; выделяемые под воздействием температуры газы создают высокое давление в трубке и ”выстреливают” из нее столб дуги, а затем гасят ее;
контакты аппарата расходятся в среде минерального (трансформаторного) масла, которое разлагается под влиянием высокой температуры появляющейся дуги; в дугогасительной камере образуется газопаровое дутье на ”гасимую” часть дуги причем более половины образованных газов составляет водород, обладающий высокой теплоотводящей способностью;
на образующийся столб дуги направляется поток сжатого воздуха из резервуара с давлением.
2МПа (воздушные выключатели высокого напряжения);
гашению дуги в среде элегаза (SF6) при давлении ниже 0,6 МПа; в камере образуется дутье элегазовой струи, обладающей высокими электроизоляционными свойствами;
гашениюдугив вакууме придавлении(10-1–10-2)Па, при этом дуга существует за счет ионизации паров контактного материала и соответственно гаснет в случае их недостаточности (уменьшение интенсивности испарения при подходе тока к нулю);
синхронному размыканию контактов перед переходом переменного тока через нуль, что существенно снижает выделение тепловой энергии в образовавшемся столбе дуги и облегчает условия восстановления его электрической прочности за переходом тока через нуль, т. е. условия гашения дуги;
применению шунтирующего дугу активного сопротивления, облегчающего условия ее гашения;
применению шунтирующих межконтактный промежуток полупроводниковых элементов, переводящих на себя ток дуги, что практически исклю- чает образование дуги на контактах.
Контрольные вопросы
1.В чем состоит разница и сходство между электрическими ключами – контактным и электронным?
2.Как рассеивается энергия, выделяемая при коммутации в контактном и электронном ключах?
3.Изобразите и докажите, какой вид будут иметь кривые тока включения RL-цепи переменного тока при условиях:
R → 0 è L → 0 ;
R → ∞ è L → ∞ ;
Φ = 0 è ϕ = π ⁄ 2 ;
Φ = π ⁄ 2 è ϕ = π ⁄ 2 .
4. Какую катушку труднее отключать на постоянном и переменном токе: с железным сердечником внутри катушки или без него?
5.В чем состоит роль электрической дуги при отключении цепей постоянного и переменного тока?
6.В чем состоит роль параметров цепи в процессе восстановления напряжения и отключения цепи переменного тока?
7.Поясните характеристики плазмы и стадии плазмы при восстановлении диэлектрических свойств межконтактного промежутка аппарата.
2.2. ЭЛЕКТРИЧЕСКИЕ АНАЛОГИ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ АППАРАТОВ
Электромеханические системы электрических аппаратов отличаются разнообразностью конструкций и происходящих в них физических процессов. Естественно, что никакая самая подробная математическая модель не может претендовать на всеобъемлемость и полную адекватность представлений технического объекта. Как правило, в этом и нет необходимости. Более того, вполне оправдано
стремление инженера получить более простую формализованную модель, которая позволит ему приближенно, но с гарантированной точностью, решить задачу анализа отдельных процессов в устройстве или задачу проектирования основных функциональных узлов. Поэтому умение обосновать упрощающие допущения не менее важно, чем овладение принципами моделирования отдельных узлов.
68

§ 2.2. Электрические аналоги электромеханических систем аппаратов
В дальнейшем будем предполагать, что электромеханическая система электрического аппарата включает следующие основные подсистемы:
электрическую (устройства генерации, потребления и передачи энергии электрического тока);
магнитную (устройства генерации, потребления
èпередачи энергии электромагнитного поля); механическую (устройства из твердых тел гене-
рации, потребления и передачи механической энергии);
тепловую (устройства генерации, потребления и передачи тепловой энергии).
Модель отдельной подсистемы представляет процессы только своей физической природы, т. е. внутри подсистемы не происходит преобразование энергии в другой вид. Правила преобразования энергии из одного вида в другой устанавливаются через зависимые источники энергии различных подсистем.
Математическая модель электромеханической системы на макроуровне представляет собой систему алгебраических и обыкновенных дифференциальных уравнений, в которой единственной независимой непрерывно изменяющейся переменной служит время. Макромодель – это модель с сосредоточенными параметрами. В ней используются достаточно крупные элементы, представляющие свойства отдельных элементов моделируемого объекта в виде простых алгебраических функций. Анализ свойств отдельных элементов выделяется в самостоятельную задачу, решение которой требует применения методов микромоделирования, например численного анализа пространственных распределений электромагнитных или тепловых полей [32, 33].
Составление математической модели системы, включающей несколько технических подсистем различной физической природы, основано на общих для всех подсистем понятиях, позволяющих добиться единообразия формы записи уравнений. К ним относятся [34] понятия элемент, переменные и тип уравнений”. ”
Названия простейших пассивных элементов для любой из подсистем соотносятся не с их конструктивными особенностями, а с характером преобразования энергии. Таких обобщенных элементов три, которые по аналогии с электрическими цепями обозначаются:
R – резистор (происходит безвозвратное рассеяние энергии);
L – индуктивность (накапливается кинетическая энергия);
C – конденсатор (накапливается потенциальная энергия).
Процессы представляются в виде временных зависимостей некоторых параметров, которые составляют совокупность искомых неизвестных математической модели и носят название фазовых переменных. По своему характеру такие переменные в рассматриваемых технических подсистемах могут быть отнесены к одному из двух типов: переменные
типа потока и переменные типа потенциала. Активными элементами модели будут независи-
мые или зависимые источники фазовых переменных: источники типа потока (источник тока в электри- ческих цепях) и источники типа потенциала ( источник ЭДС в электрических цепях). В графическом представлении математическая модель изображается эквивалентными схемами электрических цепей, содержащими необходимый набор активных и пассивных элементов.
Составляющие математическую модель уравнения выражают связи между фазовыми переменными. По смысловому содержанию формируемые уравнения объединяются названиями либо компонентных, либо топологических уравнений.
Компонентные уравнения отражают физический закон функционирования каждого элемента системы и связывают разнородные фазовые переменные (поток – потенциал). Они выводятся как на основе известных ранее фундаментальных законов и их следствий (например, второй закон Ньютона в механике), так и на основе данных специальных теоретических или экспериментальных исследований (в частности микромоделированием полей, физи- ческим макетированием и др.).
Топологические уравнения отражают структуру связей между различными элементами в подсистеме и в целом в системе и записываются для однородных фазовых переменных: отдельно для потоков и для потенциалов. Вывод топологических уравнений легко поддается формализации, так как опирается на общие правила функционирования любых технических подсистем, представляющих условия непрерывности и равновесия.
Математические записи физических законов в каждой подсистеме включают различные параметры и различны по форме. Использование понятия компонентных уравнений позволяет представить физические законы всех подсистем в одинаковой форме записи для соответствующих данной подсистеме простейших элементов R, L, C и фазовых переменных. Такие преобразования возможны благодаря существующему подобию процессов различной физической природы по отношению к накоплению и рассеянию энергии конкретного вида.
Рассмотрим компонентные уравнения простейших элементов выделенных нами подсистем
69

Гл. 2. Основные электрические и электромеханические процессы
электромеханической системы. Макромодель электрической подсистемы представляют в виде цепи постоянного или переменного электрического тока [13] и в качестве фазовых переменных используют òîêè I в ветвях и напряжения U на ее участках. Компонентные уравнения определяют связи напряжений и токов на элементах цепи.
Äëÿ электрического резистора R справедлив закон Ома: I = U/R. Для электрической катушки индуктивности L в соответствии с законом электромагнитной индукции имеем: U = LdI ⁄ dt; L = dΨ ⁄ dI, где Ψ – потокосцепление катушки индуктивности.
Äëÿ электрического конденсатора C в соответствии с законом электрической индукции справедливо соотношение: I = CdU ⁄ dt; C = dq ⁄ dU, ãäå q – заряд конденсатора.
Первичными источниками энергии в электри- ческих цепях будут источники тока и ЭДС (напряжения).
При моделировании электромеханических систем выделяются как электрическая, так и магнитная подсистемы. Поэтому при построении электрической цепи переменного тока требуется четкое разграничение составляющих индуцированной ЭДС, представляемых собственно ЭДС и отдельно напряжением на индуктивности. Обычно стараются придерживаться правила, когда включенная в электрическую цепь индуктивность не зависит от параметров системы, т. е. постоянна, а источники индуцированной ЭДС могут зависеть от параметров электрической и других подсистем.
Макромодель магнитной подсистемы строится на основе понятий магнитной цепи [13], т. е. используется представление пространственной картины магнитного поля в виде отдельных трубок магнитного потока [5]. Каждая трубка потока заменяется эквивалентной цепью с сосредоточенными параметрами, содержащими источники магнитодвижущей силы (МДС) или потока, магнитные активные и реактивные сопротивления. Уравнения и методы анализа магнитных цепей полностью аналогичны электрическим цепям.
В качестве фазовых переменных в магнитной подсистеме используются магнитный поток Φ è
магнитное напряжение Uì .
Магнитное сопротивление Rì определяется конфигурацией трубки магнитного потока и магнитной проницаемостью среды (см. § 1.3).
Магнитное напряжение на участке с сопротивлением Rì выражается законом Ома для магнитной цепи: Uì = Φ Rì .
Магнитная индуктивность Lì используется для анализа магнитных цепей при переменном потоке
для учета потерь электрической энергии в магнитной системе из-за явлений магнитного гистерезиса и возникновения вихревых токов в проводящих элементах конструкции. В отношении магнитной энергии эти явления подобны накоплению кинети- ческой энергии в механике. Значение магнитной индуктивности Lì вычисляется или на основе экспериментальных данных, или анализом распределения электромагнитного поля в элементах конструкции магнитной системы. Помимо геометрических размеров, например, сердечника электромагнита индуктивность Lì зависит от формы петли гистерезиса и электрической проводимости материала [13]. Напряжение на магнитной индуктивности связано с магнитным потоком соотношением: Uì = Lì dΦ ⁄ dt. При построении магнитных цепей процессы накопления магнитной энергии, подобные по характеру накоплению потенциальной энергии в механике, не рассматриваются и понятие магнитного конденсатора не вводится.
Первичные источники энергии представляются в виде источников МДС è источников магнитного потока.
Для электромеханической системы характерна схема преобразования электрической энергии сначала в магнитную, а затем в механическую. И наоборот, механическая энергия преобразуется в электрическую через магнитную.
При макромоделировании механических подсистем удобно рассматривать раздельно поступательное и вращательное движение элементов конструкции. При поступательном движении тел в ка- честве фазовых переменных используют ñèëó P è скорость v. Причем в зависимости от того, какая из них принимается за переменную типа потока, а какая за переменную типа потенциала, полу- чаем прямую или обращенную модели, одинаково пригодные для анализа. Пусть в качестве переменной типа потока выбрана сила P, переменной типа потенциала – скорость v (прямая модель). Элементы механической подсистемы: массы, пружины, элементы трения, объединяются общим уравнением движения, которое и является математической моделью. Для каждого отдельного элемента хорошо известны законы функционирования, легко интерпретируемые через простейшие элементы R, L, C.
Из уравнения вязкого трения: P = kòv = v ⁄ Rìåõ, ãäå kò – коэффициент вязкого трения, следует, что активное механическое сопротивление – элемент диссипации механической энергии, определяется соотношением Rìåõ = 1 ⁄ kò. Свойства упругого элемента, например, пружины с линейными свойствами, определяет закон Гука: P = kóx, ãäå ky – æåñò-
70

§ 2.2. Электрические аналоги электромеханических систем аппаратов
кость (упругость) пружины; x – перемещение. Или после дифференцирования по времени: dP ⁄ dt = kóv. Механическая индуктивность – это коэффициент пропорциональности между скоростью и производной силы, т. е. v = LìåõdP ⁄dt ; Lìåõ = 1 ⁄ kó (по аналогии с электрической цепью U = LdI ⁄ dt). Второй закон Ньютона представляет собой уравнение для ускорения P = mdv ⁄ dt , ãäå m – масса тела как коэффициент пропорциональности между силой и производной скорости (ускорением) может быть обозначена механической емкостью Cìåõ = m è
P = |
Cìåõdv ⁄ dt (по аналогии с электрической цепью |
I = |
CdU ⁄ dt). |
Таким образом, для принятой модели, где сила – поток, а скорость – потенциал, пружина является элементом накопления кинетической энергии, а масса – потенциальной энергии.
Обращенная модель механической поступательной подсистемы обосновывается для фазовых переменных типа потока – скорость v, è типа потен-
циала |
– |
ñèëà |
P. Тогда |
äëÿ |
вязкого |
трения |
||
v = |
P ⁄ Rìåõ, |
ãäå |
Rìåõ = kò, |
для уравнения |
пружи- |
|||
íû |
v = |
CìåõdP ⁄dt, ãäå Cìåõ = 1 ⁄ ky, |
для уравнения |
|||||
массы P = |
Lìåõdv ⁄dt, ãäå Lìåõ = |
m. |
В обращенной |
|||||
модели элементом накопления кинетической энергии служит масса, а потенциальной – упругая среда.
Прямая модель вращательного движения соотносится с фазовыми переменными: типа потока – момент сил M, типа потенциала – угловая скорость – ω . Вязкое трение вращательного движения определяется соотношением M = kò′ω = ω ⁄ Rìåõ, ãäå Rìåõ = 1 ⁄kò′, kò′ – коэффициент трения вращения. Закон Ньютона вращательного движения M = Jdω ⁄dt, ãäå J – момент инерции, записывается по аналогии с электрической цепью через механи-
ческую емкость: M = Cìåõdω ⁄ dt, ãäå Cìåõ = J – элемент накопления потенциальной энергии. Упругие элементы во вращательном движении сводятся к спиральным пружинам, для которых справедливо уравнение M = kó′ϕ , ãäå kó′ – угловая жесткость
пружины, ϕ – угол закручивания. После дифференцирования, принимая во внимание, что ω = dϕ ⁄ dt,
получаем ω = LìåõdM ⁄ dt è Lìåõ = 1 ⁄ ky′. Упругий элемент в прямой модели вращательного движения будет механической индуктивностью, в которой происходит накопление кинетической энергии.
Обращенная модель вращательного движения с фазовыми переменными типа потока – угловая скорость ω и типа потенциала – момент M имеет следующие выражения для простейших элементов:
Rìåõ = kò′ ; Lìåõ = J ; Cìåõ = 1 ⁄ kó′.
Математическая макромодель с сосредоточенными параметрами для анализа распределений теплоты [35, 36] обосновывается, как правило, при использовании фазовых переменных типа потока – тепловой поток Φ ò, è типа потенциала – температура υ .
Передача теплоты теплопроводностью, конвекцией и излучением в макромоделях представляется одномерными приближениями в уравнениях
законов |
Фурье |
è |
Ньютона: pò = − λ dυ ⁄ dx ≈ |
≈ − λ(υ 2 − |
υ 1) ⁄∆ l, pò = |
− |
kò(υ 2 − υ 1), ãäå pò – плотность |
теплового потока; λ – коэффициент теплопроводности; kò– коэффициент теплопередачи; υ 1 è υ 2 – температуры тела на границах рассматриваемого участка длиной ∆ l для теплопроводности или υ 1 – температура тела и υ 2 – температура окружающей среды для конвекции в точке на границе раздела.
Если рассматривать уравнения передачи теплоты по трубке теплового потока, то получим соот-
ношения для |
тепловых активных сопротивлений: |
|||
Φ ò = ∆υ |
⁄ Rò.êä è Φ ò = ∆υ ⁄ Rò.êâ, ãäå |
∆ υ = |
= υ 1 − υ 2 ; |
|
Rò.êä – тепловое сопротивление (для линейной |
||||
трубки |
Rò.êä = |
∆ l ⁄ (λ S), определяющее распростране- |
||
ние теплоты теплопроводностью; |
Rò.êâ = |
1 ⁄ (kòS) – |
||
тепловое сопротивление, определяющее распространение теплоты конвекцией и излучением; S – площадь сечения участка; ФT=PTS.
Тепловым конденсатором может быть любое тело, обладающее теплоемкостью Cò = cm, ãäå c –
удельная теплоемкость; m – масса тела. Уравнение теплоемкости связывает изменение количества теп-
ëîòû |
dQ ñ |
изменением температуры |
dυ òåëà |
||
dQ = |
Còdυ . Тепловой поток есть изменение количе- |
||||
ñòâà |
теплоты в |
единицу |
времени, |
поэтому |
|
Φ ò = |
dQ ⁄ dt = |
Cò(dυ |
⁄ dt). Таким |
образом |
емкостью |
теплового конденсатора в математической модели будет теплоемкость тела. Компонентное уравнение для тепловой индуктивности не имеет физического смысла при оперировании выбранными выше фазовыми переменными.
Отдельные элементы в каждой подсистеме объединяются в замкнутые эквивалентные схемы, которые компонуются на основе топологических уравнений, т. е. известных условий непрерывности и равновесия.
Эквивалентная схема электромеханической системы – это совокупность схем электрических цепей, представляющих элементы и их связи во всех входящих в систему и выделенных нами подсистемах в соответствии с принятыми аналогиями. Взаимосвязь между различными подсистемами при построении эквивалентных схем задается через зависимые источники фазовых переменных и зависимые
71

Гл. 2. Основные электрические и электромеханические процессы
параметры пассивных элементов – зависимые от переменных другой подсистемы.
Условия равновесия выражаются через фазовые переменные типа потока, а условия непрерывности – через переменные типа потенциала. Форма уравнений одинаковая для любой подсистемы.
В электрической подсистеме уравнение равновесия определяется первым законом Кирхгофа (сумма токов, подсоединенных к узлу ветвей равна нулю), а уравнение непрерывности – вторым законом Кирхгофа (в замкнутом контуре сумма напряжений на элементах равна нулю): Σ Iê = 0 , Σ Uj = 0. Аналогичные соотношения справедливы для других подсистем при замене на соответствующие фазовые переменные. В магнитной подсистеме используются законы Кирхгофа для магнитной цепи: сумма магнитных потоков в точке разветвления равна нулю, сумма магнитных напряжений на элементах в замкнутом контуре равна нулю:
Σ Φ ê = 0 , Σ Uìj = 0.
В механической поступательной подсистеме прямая модель основана на принципе д’Аламбера: сумма действующих на тело сил, включая инерционные, равна нулю (переменные типа потока): Σ Pê = 0. Для векторов и координатных составляющих абсолютных скоростей справедливо соотношение (переменные типа потенциала): Σ vj = 0.
Âобращенной модели фазовые переменные меняются местами и естественно топологические соотношения сохраняются.
Âмеханической вращательной подсистеме для тела: сумма всех моментов равна нулю Σ Mê = 0, è
сумма угловых скоростей вдоль оси вращения равна нулю Σ ω j = 0.
Âтепловой подсистеме: сумма тепловых потоков
âузле разветвления равна нулю Σ Φ ò.ê = 0, сумма
температур на элементах при обходе по замкнутому контуру равна нулю Σ υ j = 0.
Составление эквивалентной схемы производится в следующей последовательности [34].
1.На основании анализа конструкции электромеханического устройства выделяют подсистемы: электрическую, магнитную, механическую и др., которые по мнению исследователя необходимо включить в общую модель. Если в какой-либо подсистеме имеется несколько функционально независимых частей или подсистема характеризуется сложной разветвленной структурой, то ее условно разделяют на участки, построение эквивалентных схем для которых не будет вызывать затруднений.
2.В каждой подсистеме определяют значимые для последующего анализа элементы, обосновывают их электрические аналоги, представляются
структуры связей в подсистемах в виде эквивалентных схем электрических цепей.
Составление эквивалентных схем – не полностью формализованная процедура, так как в них отражаются только те элементы и связи реального устройства, которые по мнению инженера оказывают определяющее влияние на его функционирование. Естественно стремление получить наиболее простую модель, но с необходимой полнотой представляющей свойства устройства.
3. Устанавливаются связи между подсистемами, которые выражаются функциями источников фазовых переменных и параметров отдельных элементов от фазовых переменных других взаимосвязанных подсистем. Например, вынуждающая сила в механической подсистеме будет функцией магнитного потока магнитной подсистемы, а магнитное сопротивление – функцией перемещения якоря электромагнита.
Порядок составления эквивалентных схем иллюстирирует следующий пример.
На рис. 2.16 приведена конструкция электромеханического устройства, состоящего из электромагнита: неподвижного П-образного стального магнитопровода с катушкой, к которой подключается постоянное напряжение, и подвижного якоря в виде стальной пластины, соединенного штоком в опоре скольжения с закрепленной на неподвижном основании пружиной. Принцип действия устройства заключается в притяжении якоря к магнитопроводу. При подключении катушки к источнику напряжения в ней появляется ток, возникает магнитный поток в деталях электромагнита и усилие на якоре, которому противодействует инерционная сила, сила трения штока в опоре и упругая сила пружины. Под действием этих сил якорь совершает поступательное движение, т. е. электрическая энергия преобразуется в механическую. Часть энергии источника преобразуется в тепловую при протекании тока в проводе катушки и возбуждении вихревых токов в стальном магнитопроводе.
Рис. 2.16. Схема электромеханического устройства:
1 – стальной магнитопровод; 2 – катушка; 3 – стальной якорь; 4 – опора скольжения; 5 – пружина
72

§ 2.2. Электрические аналоги электромеханических систем аппаратов
Рис. 2.17. Эквивалентные схемы электромеханической системы (рис. 2.16):
à – электрическая подсистема; á – магнитная подсистема; â – механическая подсистема; ã – тепловая подсистема
Для последующего анализа выделяем четыре подсистемы: электрическую, магнитную, механи- ческую и тепловую. Учитывая, что данное устройство не относится к прецизионным электромагнитным механизмам, можно опираться на упрощенные представления процессов, что отражается в эквивалентных схемах указанных подсистем.
Эквивалентная схема электрической подсистемы изображена на рис. 2.17,à. В ней последовательно соединены: источник постоянного напряжения U, выключатель B, провод активным сопротивлением R, катушка индуктивности LS, связанная с магнитными потоками рассеяния (часть полного магнитного потока катушки, не сцепленная с якорем) и некоторая ЭДС e (t) = − dψ ⁄ dt, определенная рабочим потоком электромагнита, сцепленным с якорем. Обычно допускается постоянство индуктивности рассеяния, и в схеме электрической цепи зависимыми будут параметры двух элементов. Активное сопротивление зависит от температуры провода, т. е. от параметров тепловой подсистемы, а ЭДС от временной функции магнитного потока, который в свою очередь определяется параметрами магнитной и механической подсистем (положением якоря).
Эквивалентная схема магнитной подсистемы приведена на рис. 2.17,á. Она состоит из источника магнитодвижущей силы Fì = IN, ãäå N – число витков катушки эквивалентных активных магнитных сопротивлений стальных магнитопровода и якоря Rì и немагнитного зазора между сердечником и якорем Rd, а также индуктивности, определенной вихревыми токами в проводящих деталях электромагнита. Магнитодвижущая сила Fì зависит от фазовой переменной электрической подсистемы – тока I, а магнитное сопротивление Rd от параметров механической подсистемы – размера зазора. Рабочий магнитный поток и магнитные напряжения на участках цепи определяются аналогично токам и напряжениям в электрической цепи с такой же схемой.
Эквивалентная схема механической подсистемы (рис. 2.17,â) построена на основе принципа обра-
щенной модели, в которой действующее на якорь электромагнитное усилие определено источником ЭДС Pý, а элементы: масса якоря, жесткость пружины и трение в опоре, – представляются последовательным соединением индуктивности, конденсатора и активного сопротивления. Ток в такой схеме эквивалентен скорости якоря, а напряжения на элементах – составляющим результирующей силы, воздействующей на якорь. Зависимым параметром будет электромагнитное усилие, которое в рассматриваемых приближениях пропорционально квадрату магнитного потока.
Эквивалентная схема тепловой подсистемы (рис. 2.17,ã) содержит два зависимых источника тепловых потоков (аналоги источников тока в электрической цепи). Это рассеиваемая электри- ческая мощность на активном сопротивлении катушки Φ ò1, пропорциональная квадрату тока, и мощность электрических потерь в магнитопроводе и якоре Φ ò2, пропорциональная в первом приближении квадрату магнитного потока. Выделением тепла из-за трения в опоре скольжения пренебрегаем. Тепловые потоки источника Φ ò1 – аналоги токов в электрических цепях, аккумулируют тепло в тепловой емкости материала катушки Cò1, проникают от катушки через сопротивление теплопроводности Rò1 к магнитопроводу (теплоемкость магнитопровода Cò2) и рассеиваются в воздухе теплопроводностью и конвекцией Rò2. Часть теплового потока катушки непосредственно рассеивается в воздухе теплопроводностью и конвекцией Rò3. Второй источник теплового потока Φ ò2 подключа- ется параллельно тепловой емкости магнитопровода. Схема тепловой цепи только приближенно отражает характер процессов в тепловом поле. Определение конкретных параметров элементов схемы и уточнение ее конфигурации производится на основе анализа пространственного распределения теплового и электромагнитного полей (как правило расчетом полей на ЭВМ).
В составленных эквивалентных схемах все четыре подсистемы взаимосвязаны через зависимые ис-
73

Гл. 2. Основные электрические и электромеханические процессы
точники фазовых переменных и зависимые параметры пассивных элементов (активное сопротивление провода катушки, магнитное сопротивление зазора между магнитопроводом и якорем).
Предложенные эквивалентные схемы не являются единственно возможными и естественно отражают понимание физических процессов инженером в рамках поставленной перед ним задачи.
Непосредственно математическая модель представляет собой запись системы дифференциальных уравнений по составленным эквивалентным схемам четырех подсистем и выражения для зависимых параметров.
Существуют хорошо разработанные формальные методы и программное обеспечение получения математических моделей по известным эквивалентным схемам. Для решения систем дифференциальных уравнений обычно используются численные методы [37], например, метод Рунге-Кутта. Исклю- чение составляют простейшие уравнения, для которых несложно получить решения в аналитической форме.
Анализ установившихся режимов работы устройств с линейными параметрами и синусоидальными функциями фазовых переменных производится по математическим моделям в комплексной форме записи уравнений. При этом задача сводится к решению систем линейных алгебраических уравнений.
Рассмотрим особенности наиболее характерных механических узлов электрических аппаратов [9] и их эквивалентные схемы.
Две массы, соединенные пружинами между собой и с неподвижным основанием (рис. 2.18). Принимается, что массы пружин малы и не учитываются. Независимым источником фазовых переменных будет сила P, действующая на массу m1. Элементы механической подсистемы: массы m1 è m2, трение скольжения первого и второго тела о поверхность
kòð1, kòð2, жесткости двух пружин kó1, kó2. Для упрощения построения эквивалентной схемы в целях
предотвращения возможных ошибок используют
прием разделения сложного устройства на два простых в точке A. Точка A движется со скоростью v2 массы m2, поэтому для левой и правой относительно точки A частей можно составить отдельные эквивалентные схемы. Для прямой модели получа- ем две схемы, изображенные на рис. 2.19,à, а для обращенной модели – две схемы на рис. 2.19,á. В этих схемах присутствуют либо источники фазовой переменной типа потока, либо типа потенциала, заданные скоростью v2. Полученные схемы легко объединяются, так как скорость v2 одна и та же скорость массы m2 для обеих частей устройства. Объединенные схемы устройства для прямой и обращенной модели приведены на рис. 2.20,à,á. Источники скорости v2 в них исключены.
Математическая модель – система дифференциальных уравнений для фазовых переменных, выведенная на основе законов Кирхгофа для представленных на рис. 2.20 эквивалентных схем, имеет следующий вид:
v1kòð1 + m1dv1 ⁄ dt + ky1x3 = P ; v2kòð2 + m2dv2 ⁄ dt + ky2x2 + ky1x3 = 0 ;
v2 = dx2 ⁄ dt ; v3 = dx3 ⁄ dt ; v3 = v1 + v2 .
Шарнирная связь тела с неподвижным основанием
(рис. 2.21). В электрических аппаратах с электромагнитным приводом используется механический узел, который можно представить в виде твердого тела (якоря электромагнита), подвешенного одним концом через шарнир на неподвижном основании и соединенным пружиной в центре масс также с неподвижным основанием. В общем случае на это тело действуют приведенные к центру масс внешние силы Pâ произвольного направления.
Под действием момента M результирующей силы реакции шарнира PΣ тело совершает вращательное движение вокруг оси, проходящей через центр масс Ö:
Mx = P Σ x r cosϕ ; My = P Σ y r sinϕ .
Результирующая сила определяется уравнением поступательного движения по осям X è Y.
Рис. 2.18. Схема механического узла из |
Рис. 2.19. Промежуточное построение эквивалентных схем механического узла |
двух масс, соединенных пружинами между |
ðèñ. 2.18: |
собой и с неподвижным основанием |
à – прямая модель; á – обращенная модель |
74

§ 2.2. Электрические аналоги электромеханических систем аппаратов
Рис. 2.20. Окончательный вид эквивалентных схем механического узла рис. 2.18:
à – прямая модель; á – обращенная модель
Источники в эквивалентных схемах вращательного движения представляют собой моменты координатных составляющих результирующих сил реакции шарнира и определяются фазовыми переменными в эквивалентных схемах поступательного перемещения. В рассматриваемом простейшем слу- чае в схемах учитывается только момент инерции тела J относительно центра масс.
Полную математическую модель для составленных эквивалентных схем образуют уравнения цепей и выражения для зависимых источников фазовых переменных
Рис. 2.21. Механический узел с шарнирной связью тела
ñнеподвижным основанием
Âнеподвижной системе координат XOY, îñü Y которой проходит через шарнир, составляющие
поступательного перемещения центра масс (xö, yö) выражаются через параметры вращательного движе-
íèÿ (ϕ , r) формулами: xö = r sinϕ ; yö = y0 − rcosϕ . Для фазовых переменных – составляющих ли-
нейной скорости центра масс (vx, vy) и угловой скорости вращения – соотношения получаются дифференцированием формул для перемещений: vx = r ω cosϕ , vy = r ω sinϕ , ω = dϕ ⁄ dt.
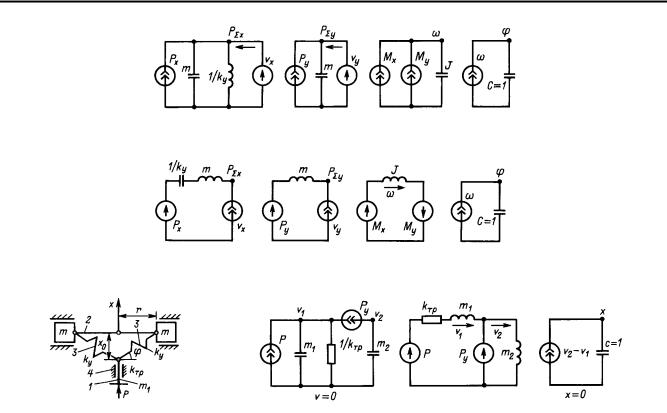
Эквивалентные схемы рассматриваемого механического узла, изображенные на рис. 2.22 (прямая модель) и рис. 2.23 (обращенная модель) содержат по две схемы для координатных составляющих линейных скоростей и сил поступательного движения центра масс, по одной схеме для угловой скорости и момента вращательного движения тела относительно центра масс и по одной схеме интеграторов для определения угла через угловую скорость. Текущий угол поворота необходим для вы- числений моментов и линейных скоростей по приведенным выше формулам.
Источниками в эквивалентных схемах поступательного движения выделены заранее не известные составляющие линейной скорости центра масс, зависимые от угловой скорости вращательного движения. В качестве пассивных элементов учтена масса тела m и жесткость пружины ky (последняя только для движения по оси x).
|
|
|
t |
P Σ x = |
mdvx ⁄ dt + kyx − Px; x = |
∫vx dt; |
|
|
P Σ y = mdvy ⁄ dt − Py; |
0 |
|
|
|
||
|
Jdω ⁄ dt = Mx + My; |
|
|
|
|
|
t |
vx = r ω |
cosϕ , vy = |
r ω sinϕ , ϕ |
= ∫ω dt; |
|
|
|
0 |
Mx = |
P Σ x r cosϕ |
, My = P Σ y r sinϕ |
|
Блок щелчковых контактов (рис. 2.24). Этот часто используемый в реле механический узел состоит из штока массой m1, который через расположенные под углом пружины связан с контактной рейкой массой m2 = 2m. Особенность узла в том, что усилие пружин Py в направлении движения штока нелинейно зависит от перемещения x в соответствии с формулой
|
√2 |
+ |
r |
2 |
|
|
Pó = 2kó (1 − |
x 0 |
|
) |
(x0 − x) , |
||
√(x0 − |
x)2 + r2 |
|||||
ãäå x0 – начальное положение штока, при котором усилие пружины равно нулю; ky – жесткость одной пружины.
При движении штока результирующая упругая сила принимает нулевые значения три раза: при x = 0, x0, 2x0. Причем при условии x = x0 рейка находится в положении неустойчивого равновесия
75
Гл. 2. Основные электрические и электромеханические процессы
Рис. 2.22. Эквивалентные схемы узла с шарнирной связью тела с неподвижным основанием (прямая модель)
Рис. 2.23. Эквивалентные схемы узла с шарнирной связью тела с неподвижным основанием (обращенная модель)
Рис. 2.24. Схема блока щелчковых контактов: |
Рис. 2.25. Эквивалентные схемы блока щелчковых контактов: |
1 – øòîê; 2 – контактная рейка; 3 – пружины; |
à – прямая модель; á – обращенная модель |
4 – опора скольжения |
|
и малое смещение штока приводит к перебрасыванию рейки в противоположном движению штока направлении до касания с неподвижными контактами. Это свойство используется в реле – переклю- чателях.
Эквивалентные схемы механического узла изображены на рис. 2.25. Упругая сила в них представлена зависимым нелинейным источником фазовой переменной как функции относительного перемещения x штока и рейки. Поэтому в эквивалентные схемы включен также интегратор для вычисления перемещения x по разности скоростей v1 − v2, ãäå v1 – скорость штока; v2 – скорость контактной рейки.
Система дифференциальных уравнений движения деталей узла записывается следующим образом
v1kòð + m1dv1 ⁄ dt = P − Py, m2dv2 ⁄ dt = Py;
|
|
√ 2 |
+ |
r |
2 |
|
|
Py = |
2ky (1 − |
x 0 |
|
|
) (x0 − x); |
||
|
|
2 |
+ r |
2 |
|||
|
|
|
|
||||
|
|
√ (x0 − x) |
|
|
|
||
t
x = ∫(v2 − v1) dt .
0
Пример расчета процесса включения электромагнитного реле с щелчковыми контактами. Схема
электромеханической системы реле изображена на рис. 2.26. Электромагнитный привод реле состоит из неподвижного стального магнитопровода с электрической катушкой и подвижного стального якоря. При подключении катушки к источнику постоянного напряжения возникает электромагнитная сила, которая притягивает якорь к магнитопроводу. Якорь соединен штоком в опоре скольжения с системой щелчковых контактов.
Динамические характеристики реле: зависимости тока, магнитного потока и перемещений якоря и контактов от времени, определяются электрическими, магнитными и механическими параметрами электромагнита и контактной системы. Анализ электромеханической системы производится в следующей последовательности. На первом этапе составляются эквивалентные схемы макромоделей для каждой подсистемы, в данном случае электри- ческой, магнитной и механической. При составлении эквивалентных схем обязательно оговаривают упрощающие допущения. Возможный вариант эквивалентных схем представлен на рис. 2.27.
В электрической подсистеме выделены три элемента: источник постоянного напряжения U, активное сопротивление проводов катушки R и переменная ЭДС e(t), вызванная изменением магнитно-
76