

Асинхронные машины
.pdfГлава 3. Асинхронные машины
3-1. Общие замечания
Асинхронные машины применяются на практике главным образом как двигатели. Наибольшее распространение имеют трехфазные асинхронные двигатели. Они находят себе самое широкое применение на заводах, фабриках, в сельском хозяйстве, на строительных работах, для вспомогательных механизмов электрических станций. Особенно много требуется трехфазных двигателей мощностью от 0,4 до 100 кВт. Такие двигатели массового применения электромашиностроительными заводами СССР выпускаются ежегодно на миллионы киловатт. Большое количество двигателей выпускается также на мощности свыше 100 кВт.
Однофазные асинхронные двигатели в настоящее время выполняются, как правило, в виде малых машин обычно на мощности не свыше 0,5 кВт.
Обмотки статора и ротора асинхронных машин между собой электрически не связаны; между ними существует только магнитная (трансформаторная) связь, называемая также индуктивной, что дало повод назвать асинхронные машины индукционными. Однако это название в Советском Союзе почти не применяется.
Обмотка статора обычно является первичной обмоткой при работе машины двигателем, так как к ней в этом случае подводится электрическая энергия. Токи обмотки статора совместно с токами обмотки ротора создают в двигателе вращающееся магнитное поле. Обмотка ротора при этом служит в качестве вторичной. Токи, наведенные в ней вращающимся полем, взаимодействуя с ним, создают электромагнитные силы, заставляющие ротор вращаться.
Асинхронные двигатели выполняются или с короткозамкнутой обмоткой на роторе, или с обмоткой на роторе (обычно трехфазной), соединенной с контактными кольцами. В соответствии с этим различают короткозамкнутые двигатели и двигатели с контактными кольцами. Последние условие называются также двигателями с фазным ротором.
На щитке асинхронного двигателя указываются следующие номинальные величины его:
1.мощность (на валу), кВт или Вт;
2.линейное напряжение обмотки статора, В;
3.линейный ток, А;
4.частота тока, Гц;
5.частота вращения ротора (число оборотов в минуту);
6.коэффициент полезного действия;
7.коэффициент мощности (косинус угла сдвига фаз между напряжением и током фазы обмотки статора);
8.напряжение на контактных кольцах (при неподвижном роторе) и ток обмотки ротора (при номинальном режиме) для двигателя с контактными кольцами.
Кроме того, на щитке указываются схема соединений обмотки статора, режим работы (продолжительный, кратковременный или повторно-кратковременный), для которого предназначен двигатель, и полный вес его в килограммах.

3-2. Устройство и основные элементы конструкции
Основными частями машины являются статор и ротор. Их сердечники собираются из листов электротехнической стали (рис. 3-1), которые до сборки обычно покрываются с обеих сторон специальным лаком.
Рис. 3-1. Листы сердечников статора (1) и ротора (2).
Тем самым предотвращается образование больших вихревых токов в стали сердечников. Иногда для небольших двигателей их сердечники собирают из листов без покрытия последних лаком, так как окалина на внешних поверхностях листов создает достаточную изоляцию между ними.
На рис. 3-1 показаны листы, из которых собираются статор и ротор машин небольшой и средней мощностей. Они обычно штампуются при помощи штампа, позволяющего одним ударом получить необходимую форму листа со всеми отверстиями. Отверстия на внутренней окружности листов статора и на внешней окружности листов ротора после сборки их образуют пазы статора и ротора, в которые закладываются проводники обмоток.
На рис. 3-2 и 3-3 показаны в разобранном виде двигатели — короткозамкнутый и с контактными кольцами.
Рис. 3-2. Асинхронный двигатель короткозамкнутым ротором в разобранном виде.
а — статор; 6 — ротор; в — подшипниковые щиты; г — вентилятор; д — отверстия для входа и выхода охлаждающего воздуха; е — коробка, прикрывающая зажимы.

Рис. 3-3. Асинхронный двигатель с контактными кольцами в разобранном виде.
а — статор; 6 — ротор; в — подшипниковые щиты; г — вентилятор; д — отверстия для входа и выхода охлаждающего воздуха; е — коробка, прикрывающая зажимы; ж — контактные кольца, з— щеткодержатели и щетки.
Сердечник статора помещается в корпусе, который служит его внешней частью. Сердечник ротора укрепляется непосредственно на валу двигателя или на втулке (в форме крестовины), надетой на вал двигателя.
Вал вращается в подшипниках, укрепленных в боковых щитах, называемых подшипниковыми щитами. Машины мощностью до 500—600 кВт (иногда и выше) снабжаются подшипниками качения (шариковыми и роликовыми), при большей мощности — подшипниками скольжения. При внешнем диаметре сердечника статора свыше 1 м обычно применяют стояковые подшипники (рис. 3-4).
Рис. 3-4. Асинхронный двигатель большой мощности со стояковыми подшипниками.
Подшипниковые щиты прикрепляются к корпусу статора при помощи болтов или шпилек. Щиты и корпус статора обычно выполняются литыми из чугуна. Для малых машин их часто выполняют литыми из сплава с большим содержанием алюминия, что уменьшает вес машины.
3-3. Обмотки статора и ротора и наведение в них э.д.с.
Обмотки и сердечники статора и ротора являются основными частями электрической машины. Они и создают в ней условия для электромагнитных процессов, протекающих при преобразовании электрической энергии в механическую или при обратном преобразовании.
Рассмотрим вначале обмотки статора. Они одинаковы как у асинхронных, так и у синхронных машин. Обмотки состоят из витков, заложенных в пазы статора и соединенных между собой по особым правилам.
а) Электродвижущая сила витка.
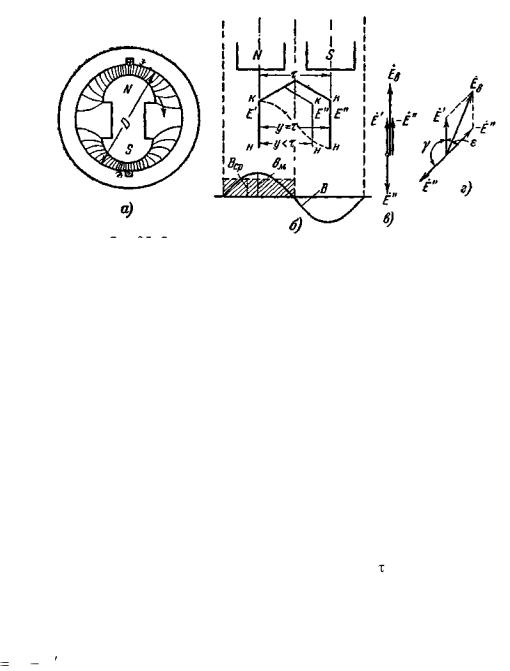
На рис. 3-5,а показаны статор и один виток его обмотки. Стороны витка, уложенные в пазы, представляют собой его активные части. Часть витка, находящаяся вне пазов статора, называется лобовой частью или лобовым соединением.
Рис. 3-5. Статор одним витком и наведение э. д. с. в витке.
Пусть внутри статора вращается электромагнит или постоянный магнит с двумя полюсами. При этом мы получаем вращающееся поле; его индукционные линии показаны только в воздушном зазоре между статором и ротором. Примем это поле синусоидальным, т. е. будем считать, что кривая распределения индукции В (ее нормальной составляющей) в воздушном зазоре вдоль внутренней окружности статора представляет собой синусоиду (рис. 3-5,б).
Поле, близкое к синусоидальному, удается получить, выбрав надлежащим образом форму очертания полюсного наконечника.
При вращении поля в проводниках будут наводиться э.д.с., направления которых для выбранного момента времени найдем по правилу правой руки, учитывая направление перемещения проводника относительно поля. Очевидно, эти э.д.с. при постоянной скорости вращения будут изменяться во времени синусоидально. Поэтому мы их можем изобразить временными векторами
E и E
и E . Электродвижущие силы E
. Электродвижущие силы E и E
и E сдвинуты по фазе на 180°. Такому сдвигу соответствует расстояние между проводниками, равное полюсному делению . Полюсным делением называется расстояние между осями соседних полюсов, взятое по внутренней окружности статора.
сдвинуты по фазе на 180°. Такому сдвигу соответствует расстояние между проводниками, равное полюсному делению . Полюсным делением называется расстояние между осями соседних полюсов, взятое по внутренней окружности статора.
Электродвижущая сила витка равна векторной разности э.д.с. проводников:
Eв E E
E ,
,
так как при образовании витка стороны его соединяются встречно — конец одного проводника соединяется с концом другого проводника. При прямом соединении проводников, показанном на
рис. 3-5,б пунктиром, э.д.с. витка была бы равна векторной сумме э.д.с. проводников, т. е. в данном случае была бы равна нулю.
Ширина витка взята равной . Она определяет шаг обмотки, который обозначается через у. Обмотки, состоящие из таких витков (при y = ), называются диаметральными или обмотками с полным шагом. Обмотки с витками, ширина которых меньше полюсного деления (у< ), называются хордовыми или обмотками с укороченным шагом.
Максимальная э.д.с., наведенная в проводнике, В, равна:
Eм Bм lv, |
(3-1) |
где Вм — максимальная индукция в воздушном зазоре, В·с/см2;
l — активная длина проводника, см;
v — скорость поля относительно проводника, см/с.
Частота наведенной в проводнике э.д.с. при двух полюсах, Гц, равна:
f 60n ,
где п — частота вращения, об/мин.
При числе полюсов, равном 2р, частота будет в р раз больше:
f |
pn |
, |
|
60 |
|||
|
(3-2) |
так как в этом случае за один оборот ротора мимо проводника пройдут р северных и р южных полюсов.
Полюсное деление, см,
η |
πD |
, |
|
2 p |
|||
|
(3-3) |
||
|
|
где D — внутренний диаметр статора, см.
Частоту v можно представить в виде
v |
|
πDn |
|
p |
2ηf . |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
60 |
|
|
p |
|
(3-4) |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая полученное равенство, |
а также соотношение между максимальным и средним |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Bм |
|
π |
Bср |
, |
|
|
|
|
|
|
|
|
|
|
2 |
||||
значениями индукции (для синусоиды) |
|
можно (3-1) переписать в следующем виде: |
||||||||||||
E |
|
2 |
π |
B lηf |
πfФ |
|
, |
|
|
|
|
|||
м |
|
м |
|
|
|
|
||||||||
|
2 |
|
ср |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
где магнитный поток Фм = Вср/ , В·c. Таким образом, действующее значение э.д.с. в проводнике
E |
Eм |
|
|
π |
|
fФм |
2,22 fФ м . |
|||
|
|
|
|
|
|
|
||||
2 |
2 |
|||||||||
|
|
|
(3-5) |
|||||||
|
|
|
|
|
|
|
|
|
||
Электродвижущая сила витка при y = (рис. 3-5,в)
Eв 2E 4,44 fФм . |
(3-6) |
При у <  э.д.с. витка Ев будет меньше, чем 2Е, так как в этом случае сдвиг между E
э.д.с. витка Ев будет меньше, чем 2Е, так как в этом случае сдвиг между E и E
и E будет меньше 180° (рис. 3-5,г). Этот сдвиг теперь равен:
будет меньше 180° (рис. 3-5,г). Этот сдвиг теперь равен:
γ |
y |
1800 , |
|
η |
|||
|
(3-7) |
Поэтому Ев при y < нужно рассчитывать по формуле
Eв |
2E sin |
γ |
2E cos |
ε |
, |
|
|
|
|
||||
|
2 |
2 |
|
(3-8) |
||
где ε = 180 —γ.
Следовательно, э.д.с. витка
Eв |
4,44 fkу Фм , |
(3-9) |
|
||||
|
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
kу |
sin |
γ |
sin |
y |
900 |
|
|
|
|
|
|
||||
|
2 |
|
η |
|
(3-10) |
|
|
есть коэффициент укорочения. |
Он учитывает то, что при у < э.д.с. |
проводников, образующих |
|||||
виток, складываются не арифметически, а геометрически: kу < 1 при у < |
и ky = 1 при y = . |
||||||
б) Электродвижущие силы катушки, катушечной группы и фазы обмотки.
Если вместо одного витка взять катушку, состоящую из wК витков, то э.д.с. в катушке будет в wк раз больше, чем в одном витке:
Eк |
wк Eв |
4,44 fkу wк |
Фм . |
(3-11) |
|
|
|
|
Обмотка статора обычно состоит из катушек, равномерно сдвинутых одна относительно другой по окружности статора. Стороны катушек закладываются в пазы. В паз закладывают или одну катушечную сторону, или. две катушечные стороны одну над другой. В соответствии с этим различают однослойные и двухслойные обмотки.
На рис. 3-6 представлен статор двухполюсной машины с трехфазной, однослойной обмоткой. Каждая фаза здесь состоит из трех катушек, образующих катушечную группу. При вращении внутри статора электромагнита с двумя полюсами в катушечных группах будут наводиться э.д.с., сдвинутые по фазе на 120°, так как оси катушечных групп сдвинуты по окружности статора на 2/3 .
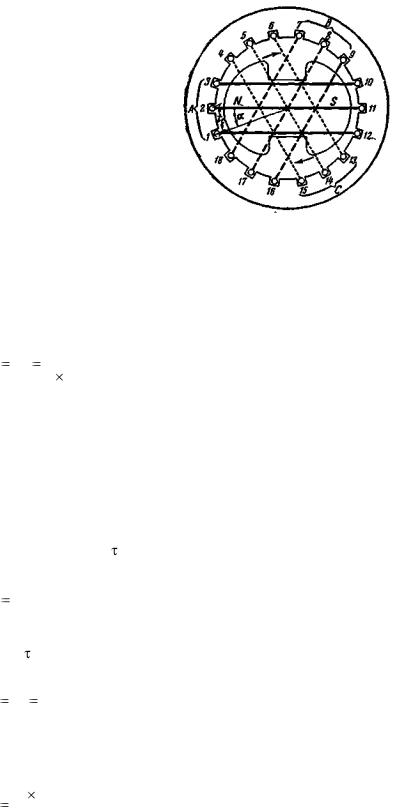
Рис. 3-6. Трехфазная обмотка статора при 2р = 2 и q = 3.
Общее число пазов на окружное статора обозначается через Z. На полюсное деление приходится Q = Z/(2p) пазов. Так как на одном полюсном делении расположены три фазные зоны, то на каждую фазную зону приходится пазов:
q |
Q |
|
Z |
, |
|
|
|
||
3 |
|
3 2 p |
||
|
|
|
|
(3-12) |
где q — число пазов на полюс и фазу.
Катушечные стороны, заложенные в пазы, равномерно распределены по окружности статора (рис. 3-6). В соответствии с этим наведенные в них э.д.с. будут сдвинуты по фазе. Соседние катушечные стороны смещены на пазовое деление tс, под которым понимается расстояние между серединами соседних пазов.
Так как сдвигу на соответствует угол 180°, то сдвигу на tc будет соответствовать угол
α |
|
tc |
1800. |
|
|
|
|
η |
(3-13) |
||||
|
|
|
|
|
||
Если |
измерять числом пазовых делений, то получим пазовых делений |
|||||
η |
Q |
|
Z |
. |
|
|
|
|
|
||||
|
|
|
|
2 p |
(3-14) |
|
|
|
|
|
|
|
|
В этом случае имеем (tc = 1), эл. град:
α |
p 360 |
. |
|
|
|
||
|
Z |
(3-15) |
|
Угол α есть угол между векторами э.д.с. соседних катушечных сторон. В двухполюсной машине он соответствует центральному углу, стороны которого опираются на дугу tc (рис 3-6); в многополюсной машине угол α в р раз больше, чем тот же центральный угол. Поэтому различают угол в геометрических градусах (или радианах) и угол в электрических градусах (или радианах). В общем случае один геометрический градус соответствует р эл. град. Вся окружность статора соответствует, следовательно, 360р эл. град (или 2рπ эл. рад).
Построим векторы э.д.с. в катушечных сторонах обмотки, представленной на рис. 3-6, обозначив их соответственно номерам пазов цифрами 1, 2, 3 и т. д. При этом получим векторную
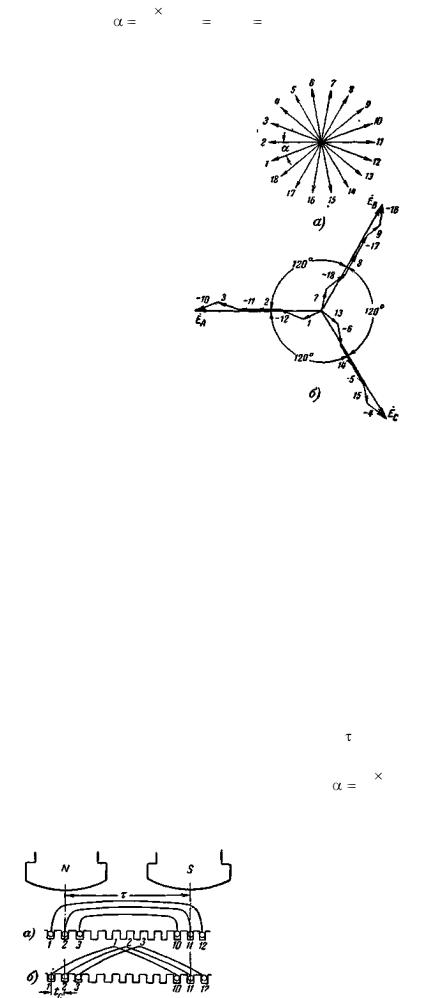
диаграмму, показанную на рис. 3-7,а, где сдвиг по фазе э.д.с. катушечных сторон, лежащих в
|
p |
3600 |
|
3600 |
200. |
|
соседних пазах, равен |
Z |
18 |
||||
|
||||||
Рис. 3-7. Векторные диаграммы.
а — звезда пазовых э.д.с., б — э.д.с. фаз.
Эта диаграмма называется звездой пазовых э.д.с. С ее помощью мы можем найти э.д.с. фаз обмотки, как показано на рис. 3-7,б, где векторы э.д.с. взяты в уменьшенном масштабе по сравнению с рис. 3-7,а. Сложение векторов произведено в соответствии с рис. 3-6, при этом учитывалось, что э.д.с. катушек получаются в результате встречного соединения их сторон.
Звезда пазовых э.д.с. и построенная с ее помощью диаграмма э.д.с. фаз обмотки позволяют проверить, правильно ли выполнены соединения катушечных сторон и катушек обмотки. Электродвижущие силы фаз должны быть равны и сдвинуты по фазе для трехфазной обмотки на 120° (рис. 3-7,б). Если соблюдены эти условия, то обмотка будет симметричной.
Обратимся к рис. 3-8,а и б, где изображены две катушечные группы трехфазной обмотки: одна состоит из различных по ширине катушек, другая — из катушек, одинаковых по ширине. Каждая катушка второй группы имеет ширину, равную , поэтому э.д.с. катушки здесь получается в результате арифметического сложения э.д.с. ее сторон. Обозначим э.д.с. катушек через Eк1, Eк2, Ек3.
|
p |
3600 |
. |
|
|
Z |
|
Они равны по величине, но по фазе сдвинуты на угол |
В соответствии с этим построим |
||
диаграмму э.д.с. катушек группы, изображенной на рис. 3-8,б. |
|
|
|
Рис. 3-8. Катушечные группы однослойной обмотки.
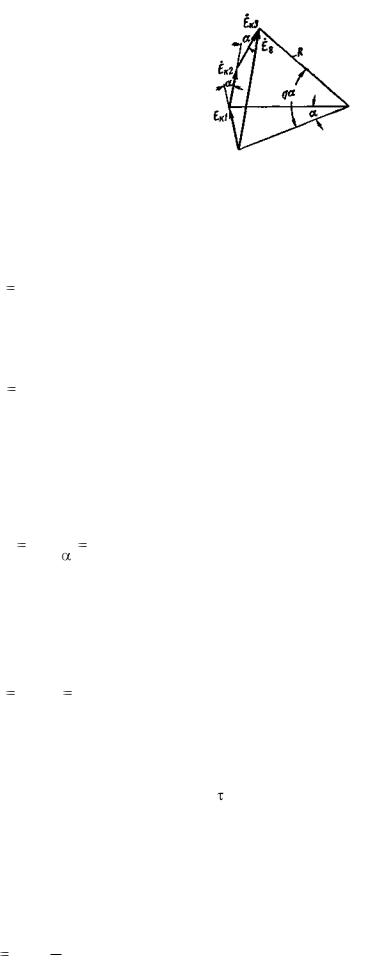
Рис. 3-9. Определение э.д.с. катушечной группы.
Диаграмма представлена на рис. 3-9. Она позволяет определить э.д.с. Ег катушечной группы, которая в общем случае состоит из q катушек. Из диаграммы получаем:
Eг |
2R sin |
q α |
|
|
2 |
(3-16) |
|||
|
|
и э.д.с. катушки
Eк |
2R sin |
α |
, |
|
2 |
||||
|
|
(3-17) |
где R — радиус описанной окружности.
Отношение
|
|
sin |
qα |
|
|
|
EГ |
|
|
|
|
|
|
2 |
|
kр |
||||
qEк |
|
qsin |
|
|
||
|
|
|
|
|||
|
|
2 |
(318) |
|||
называется коэффициентом распределения. Он, следовательно, равен отношению геометрической суммы э.д.с. катушек катушечной группы к арифметической сумме тех же э.д.с. Учитывая (3-11) и (3-18), получим:
Eг |
kр qEк |
4,44 fkу kр qwк |
Фм . |
(3-19) |
|
|
|
|
Точно такую же э.д.с. мы получим и для катушечной группы рис. 3-8,а, соответствующей рис. 3-6, так как в нее входят те же катушечные стороны, что и в группу рис. 3-8,б. Следовательно, обмотка рис. 3-6 в отношении получения э.д.с. может рассматриваться как обмотка с одинаковыми катушками, имеющими ширину, равную , т. е. как диаметральная.
В однослойной обмотке при 2р = 2 одну фазу составляет одна катушечная группа; при 2р > 2 фаза состоит из р катушечных групп, которые могут быть соединены последовательно, параллельно или последовательно-параллельно. Все р катушечных групп имеют одинаковое число катушек, равное q. Если на фазу взято а параллельных ветвей, то общее число последовательно соединенных витков фазы, определяющее ее э.д.с., равно:
1 w pqwк a .
(3-20)
Следовательно, э.д.с. фазы обмотки
E 4,44 fk0 wФм |
, |
(3-21) |
|
|
где
k0 |
kу kр |
(3-22) |
|
|
есть обмоточный коэффициент. Он равен, как это следует из предыдущего, отношению геометрической суммы э.д.с. последовательно соединенных проводников фазы к их арифметической сумме.
Сравнивая формулу (3-21) с формулой (2-5) [или (2-6)], по которой определяется э.д.с. в обмотке трансформатора, мы видим, что для трансформатора обмоточный коэффициент равен единице, так как э.д.с. во всех витках его обмотки совпадают по фазе.
в) Однослойные обмотки.
Обмотка, представленная на рис. 3-6, не может считаться практически пригодной, так как лобовые части ее катушек не позволили бы ни вставить, ни вытащить ротор. Их нужно отогнуть.
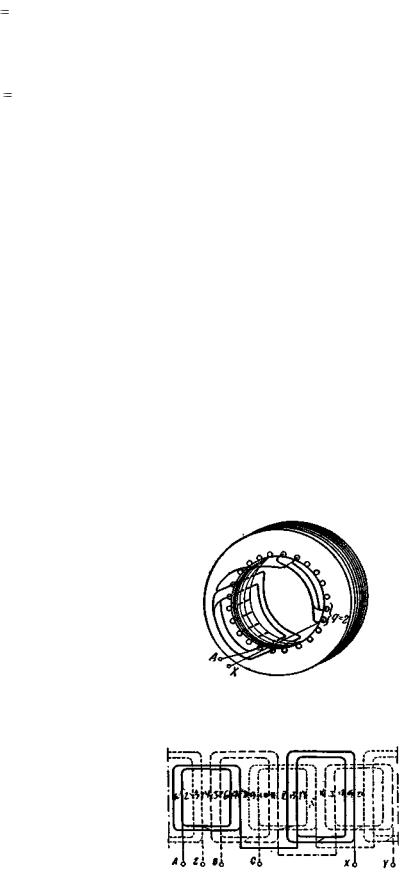
На рис. 3-10 показана одна фаза трехфазной обмотки четырехполюсной машины с отогнутыми лобовыми частями. Она состоит из двух катушечных групп при их последовательном соединении. На рис. 3-11 приведена полная схема-развертка той же обмотки при 2р = 4 и q = 2. Такая схема получается, если мысленно разрезать внутреннюю цилиндрическую поверхность статора по образующей и развернуть ее в плоскость. Она дает наглядное представление о размещении катушек, соединении их в группы и соединении катушечных групп отдельных фаз между собой. Размещение ее лобовых частей показано на рис. 3-12.
Рис. 3-10. Одна фаза обмотки статора четырехполюсной машины.
Рис. 3-11. Трехфазная однослойная обмотка при 2p = 4 и q = 2.