

для первого курса / для первого курса / тер мех / 02. Связь. Реакции связей. Сходящиеся силы
..pdfСвязью называется любое механическое ограничение на перемещение ТТ. Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, будет действовать на нее с некоторой силой, называемой силой давления на связь. Одновременно по 3 закону Ньютона на тело со стороны связи будет действовать равная по модулю и противоположная по направлению сила. Сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям, называется
силой реакции связи или реакцией связи.
Направлена реакции связи в сторону противоположную той , куда связь не дает перемещаться.
Направление сил противодействия:
1 рисунок – тело на поверхности.
2 рисунок – маятник.
3 рисунок - балка на шарнире.
4 рисунок – балка на подвижном в стороны шарнире.
5 рисунок – в данном случае направление перпендикуляров сил противодействия направлен от возможных мест.
Принцип освобождаемоcти: всякое несвободное тело можно рассматривать как свободное, если действие связей заменить реакциями их, приложенными к данному телу.
Система сходящихся сил — это такая система сил, действующих на абсолютно твёрдое тело, в которой линии действия всех сил пересекаются в одной точке.
Равнодействующая сходящихся сил. Рассмотрим систему сходящихся сил, т. е. сил, линии действия которых пересекаются в одной точке (рис. 15, а). Так как сила, действующая
на абсолютно твердое тело, является вектором скользящим, то система сходящихся сил эквивалентна системе сил, приложенных в одной точке (на рис. 15, а в точке А).
Последовательно применяя закон параллелограмма сил, придем к выводу,
что система сходящихся сил имеет равнодействующую, равную геометрической сумме (главному вектору) этих сил и приложенную в точке пересечения их линий действия. Следовательно система сил F1 F2, . . . , Fn, изображенных на рис. 15, а, имеет равнодействующую, равную их главному вектору R и приложенную в точке А (или в любой другой точке, лежащей на линии действия силы R, проведенной через точку А).
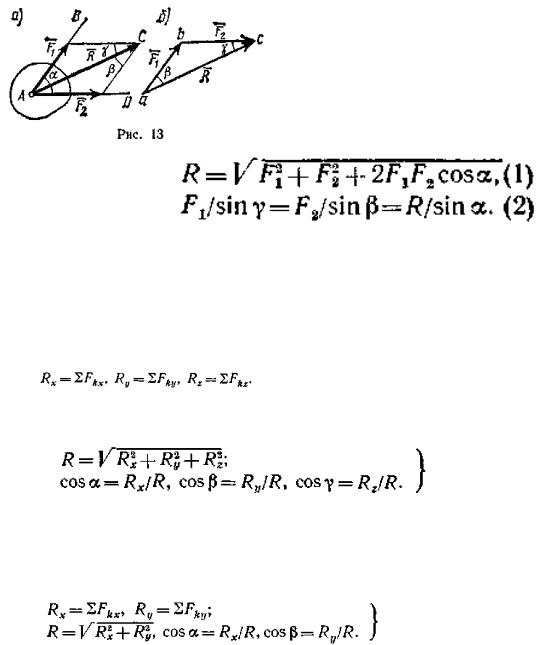
Графический (геометрический) способ нахождения равнодействующей. Геометрическая сумма R двух сил F1и F2 находится по правилу параллелограмма (рис. 13, а) или построением силового треугольника (рис. 13, б), изображающего одну из половин этого параллелограмма. Если угол
между силами равен а, то модуль R и углы β, γ,
которые сила R образует со слагаемыми силами, определяются по формулам:
Аналитический способ сложения сил. Переход от зависимостей между векторами к зависимостям между их проекциями осуществляется с помощью следующей теоремы геометрии: проекция вектора суммы на какую-нибудь ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Согласно этой теореме, если R есть сумма сил то
то
Зная Rx, Ry и Rz, по формулам (6) находим:
Формулы (8), (9) и позволяют решить задачу о сложении сил аналитически.
Для сил, расположенных в одной плоскости, соответствующие формулы принимают вид:
Если силы заданы их модулями и углами с осями, то для применения аналитического метода сложения надо предварительно вычислить проекции этих сил на координатные оси. Геометрическое условие равновесия. Так как главный вектор R системы сил определяется как замыкающая сторона силового многоугольника, построенного из этих сил (см. рис. 15), то R может
обратиться в нуль только тогда, когда конец последней силы в многоугольнике совпадает с началом первой силы, т. е. когда многоугольник замкнется.
Следовательно, для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым.
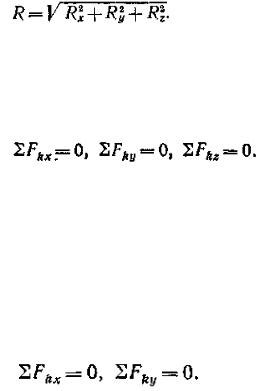
Аналитические условия равновесия. Аналитически модуль главного вектора системы сил определяется формулой
Так как под корнем стоит сумма положительных слагаемых, то R обратится в нуль только тогда, когда одновременно Rx=0, Ry=0, Rz=0, т. е., как это следует из формул (8), когда действующие на тело силы будут удовлетворять равенствам:
Равенства (11) выражают условия равновесия в аналитической форме: для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы, суммы проекций этих сил на каждую из трех координатных осей были равны нулю.
Если все действующие на тело сходящиеся силы лежат в одной плоскости, то они образуют плоскую систему сходящихся сил. В случае плоской системы сходящихся сил получим, очевидно, только два условия равновесия: