

8.8. Устройства плавного пуска (упп) (Softstart)
Влияние на сам двигатель. Пиковые броски тока в переходном процессе пуска (6-7-кратные по отношению к номинальному) приводят к значительным усилиям на проводники, расположенные в лобовых частях обмотки электродвигателя, и как следствие - к ослаблению бандажирования обмотки, постепенному нарушению (перетиранию) изоляции и преждевременному выходу двигателя из строя по причине короткого замыкания витков обмотки.
Влияние на питающую сеть. При питании от автономных генераторов, особенно в конце линии электропередачи, падение напряжения на внутреннем сопротивлении источника питания и этой линии при протекании больших пусковых токов приводит к просадке напряжения в сети, что отрицательно сказывается на работе другого подключенного к ней оборудования (компьютеры, связь, терминалы релейной защиты и др.), а сам двигатель может не запуститься из-за снижения его момента пропорционально квадрату просадки напряжения.
Влияние на технологический процесс. Пиковые моменты переменного знака, развиваемые двигателем при пуске (4-5-кратные по отношению к номинальному), приводят к постепенному увеличению зазоров в механических соединениях между двигателем и механизмом, кроме того, в ряде случаев вредно сказываются на технологическом процессе, где такие механические нагрузки недопустимы (например, магистральные конвейеры, когда происходит вытягивание приводного ремня, вентиляторы и смесители в случае опасности деформирования лопастей, системы транспортировки развешанных, уложенных или хрупких материалов при возможности их раскачивания, падения или рассыпания и т.д.).
Эффективным способом устранения указанных недостатков является пуск и останов двигателя через устройство плавного пуска (УПП), позволяющее как плавно, с заданным темпом, увеличивать напряжение, подаваемое на двигатель при разгоне, с последующим его переключением на шунтирующий контактор, так и плавно уменьшать напряжение при останове.
Наиболее простой способ останова двигателя – на выбеге, когда он отключается от сети. При этом развиваемый двигателем момент скачком падает до нуля и происходит его неконтролируемый останов за счет действия сил сухого трения и сопротивления нагрузки, который может протекать достаточно быстро (менее 1 с). Поэтому для возможности задавать и контролировать время останова в УПП типа SSM введен дополнительный режим – плавное замедление – когда напряжение, подаваемое на двигатель, плавно снижается с заданным темпом, плавно уменьшая в процессе останова и момент на валу. Снижение напряжения происходит за заданное время (1-60 с), и время останова может превышать в несколько раз время останова на выбеге.
Чаще всего данная функция используется для уменьшения резких изменений давления в трубопроводах систем подачи или перекачки жидкости (вода, нефть и т.д.), которые сопровождаются гидравлическим ударом и хлопаньем обратного клапана. Действительно, в таких системах жидкость нагнетается из области меньшего в область большего давления. Разность этих давлений в статическом режиме называется «статическим напором системы». Когда насос отключается, его выходное давление быстро падает до нуля и статический напор заставляет жидкость двигаться в противоположную сторону. Для исключения этого явления в любом месте системы (чаще всего на выходе насоса) устанавливают обратный клапан, допускающий протекание жидкости только в одном направлении. Когда клапан закрывается, скорость движущейся жидкости внезапно падает до нуля. Поскольку жидкость не может сжиматься, запасенная кинетическая энергия преобразуется в ударную волну, которая перемещается по трубопроводной сети в поисках выхода для ее рассеивания. Звук, создаваемый ударной волной, называют «гидравлическим ударом» (рис. 1а). Энергия ударной волны может быть чрезвычайно опасна для труб, соединительных муфт, фланцев, уплотнений и других монтажных конструкций.
При использовании функции «плавное замедление» крутящий момент двигателя насоса медленно снижается, постепенно снижая и давление в трубе. Когда выходное давление насоса станет чуть ниже статического напора, поток плавно меняет направление на обратное и закрывает обратный клапан. К этому времени движущаяся жидкость обладает уже очень малой кинетической энергией, и ударная волна не образуется. Когда выходное напряжение устройства, подаваемое на двигатель, станет достаточно низким и необходимость в нем отпадает, УПП-SSM завершит цикл плавного замедления и отключится.
Номинальные напряжения трехфазного асинхронного двигателя.
Трехфазные односкоростные моторы обычно могут работать на двух напряжениях. Три обмотки статора соединяются звездой (Y) или треугольником (D). На табличке двигателя, имеющего открытую схему соединения статорной обмотки, указываются напряжения для соединения и звездой (400 или 690 В) и треугольником (230 или 400) В.
При изменении напряжения питания следует помнить, что при одинаковой номинальной мощности ток будет зависеть от величины напряжения.
На рис. 1 показаны соединения звездой или треугольником в клеммной коробке двигателя.
Обозначения фаз L1, L2, L3 и выводов: U1- U2, V1-V2, W1- W2- стандарт МЭК; А, В, С и С1- С4, С2- С5, С3- С6 – российский стандарт.
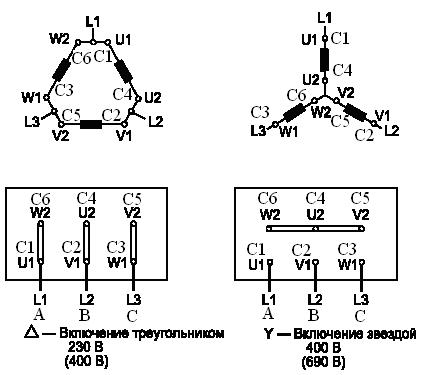
Рис.1. Соединения треугольником и звездой.
Различные способы пуска
Пуск прямым включением в сеть (D.O.L – англ.)
Этот метод остается самым распространенным способом пуска. Пусковое оборудование состоит из главного контактора и теплового или электронного реле перегрузки. Недостатком этого метода является самый большой пусковой ток, по сравнению с другими методами. Обычно его величина в 5 - 7 раз превышает номинальный ток мотора, однако бывают случаи превышения и в 9 - 10 раз. Помимо пускового тока возникает кратковременный бросок тока, который может в 14 раз (Kу≈2) превышать номинальный ток. Эти величины зависят от конструкции и мощности мотора, при этом менее мощные моторы имеют большие относительные значения пускового и импульсного токов. При прямом пуске стартовый крутящий момент также велик и в большинстве случаев больше необходимого. Крутящий момент эквивалентен силе, а чрезмерные усилия ведут к ненужным перегрузкам трансмиссии и приводимых механизмов. Тем не менее есть ситуации, когда этот метод пуска прекрасно работает и более того, является единственно возможным.
Пуск переключением соединения звезда-треугольник
Этот метод пуска уменьшает пусковой ток в обмотках в 1,73 раза и стартовый крутящий момент 3 раза. Пусковое устройство обычно состоит из трех контакторов, реле перегрузки и таймера, задающего время нахождения в состоянии соединения звездой (пусковое положение). Мотор должен в нормальном режиме работы иметь соединение треугольником, чтобы этот метод мог использоваться.
Этот способ применим только при небольшом тормозном моменте создаваемом приводимым механизмом во время пуска. Если мотор сильно нагружен, крутящий момент может оказаться недостаточным для разгона мотора до скорости, при которой будет производиться переключение на треугольник. Например, при пуске насосов или вентиляторов крутящий момент невысок в начале работы и возрастает пропорционально квадрату скорости. При достижении примерно 80-85 % от номинальной скорости мотора крутящий момент нагрузки будет равен крутящему моменту мотора и разгон прекратится.
Для достижения номинальной скорости необходимо переключение на треугольник, что зачастую приводит к возникновению пиковых нагрузок в трансмиссии и пиковых токов. Если же в момент запуска тормозной момент нагрузки превышает 30 - 40 % от номинального крутящего момента мотора, запуск с помощью переключения соединения звезда-треугольник может стать невозможным.
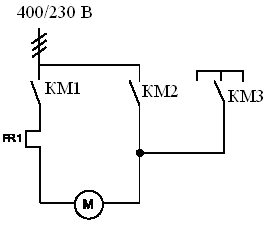
Рис.2. Однолинейная схема пуска «звезда-треугольник».

Рис.3. Графики вращающего момента и тока
Преобразователь частоты
Преобразователи частоты применяются для регулирования скорости асинхронных двигателей. Преобразователь состоит из двух основных блоков (рис.4). Первый преобразует напряжение переменного тока (50 или 60 Гц) в постоянный ток, а второй преобразует напряжение постоянного тока обратно в переменное, но с регулируемой частотой. С помощью регулирования частоты номинальный крутящий момент может быть достигнут на низкой скорости, при этом пусковой ток составляет 1 - 1.5 от номинального тока мотора. Другой полезной функцией является мягкая остановка, которая очень полезна, например, для остановки насосов, когда при обычной остановке может возникнуть проблема гидравлического удара в трубопроводе. Функция мягкой остановки также полезна при остановке ленточных конвейеров при транспортировке хрупких материалов, которые могут быть повреждены при резкой остановке ленты.
Как правило вместе с приводом устанавливаются фильтры, чтобы уменьшить уровень излучений и генерируемых гармоник.
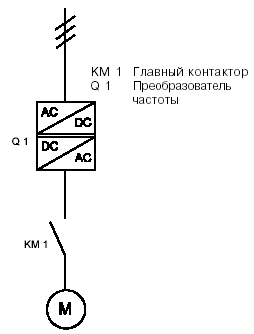
Рис.4. Принципиальная схема частотного привода.
Система плавного пуска
Система плавного пуска имеет характеристики, отличающиеся от остальных методов пуска. Принцип ее действия основан на регулировании действующего значения напряжения на двигателе с помощью встречно-параллельных тиристоров с управляемым углом открытия (рис.5). На первом этапе запуска напряжение, подаваемое на мотор настолько мало, что позволяет только выбрать зазоры в редукторах или натянуть приводные ремни или цепи, что позволяет избежать нежелательных рывков при пуске. Постепенно напряжение и крутящий момент возрастают и механизм разгоняется.
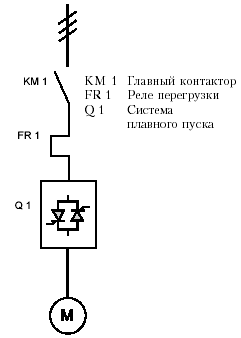
Рис.5. Принципиальная схема системы плавного пуска.
Одним из преимуществ этого метода пуска является возможность точной регулировки крутящего момента. Снижение избыточного пускового момента позволяет уменьшить износ соединительной муфты и самого приводимого механизма, что в результате выражается в снижении затрат на техническое обслуживание. Другой функцией системы плавного пуска является мягкая остановка, которая весьма полезна для снижения ударныех нагрузок в трубопроводах.
Функция мягкой остановки также может быть полезна при остановке конвейеров для предохранения материалов от повреждений, которые могут возникнуть при резкой остановке ленты.
На рис.6 показаны графики изменения вращающего и тормозного моментов и тока при плавном пуске механизма с вентиляторной характеристикой тормозного момента.

Рис.6. Графики момента и тока при плавном пуске.
Описание систем плавного пуска
Конструкция, настройки и сигналы
Конструктивно система плавного пуска состоит, как правило, из нескольких основных элементов: тиристоры с радиаторами, вентилятор, электронная плата управления и корпус.
Система управления может быть цифровой, аналоговой или комбинированной. Она может иметь фиксированные настройки или программироваться – в этом случае основные настройки выбираются пользователем.
Система плавного пуска может оборудоваться встроенным электронным реле защиты от перегрузки, устанавливаемым вместо обычно используемого биметаллического реле.
Необходимость в обмене данными между различными устройствами в системе и между устройствами и пультом управления постоянно возрастает. Большинство современных систем плавного пуска оборудуются специальным коммуникационным портом. Для передачи данных используются разнообразные коммуникационные протоколы, например, Modbus, Profibus, DeviceNet, Interbus-S, LON Works и др.
Описание пуска

Рис.7. Управление углом открытия тиристоров
Основные настройки (рис.8)
Начальное напряжение
Выбирается на уровне, достаточном для трогания механизма. Например, если начальный момент сопротивления механизма равен 0,2 о.е., то начальное напряжение должно быть более, чем √0,2 = 0,45 о.е.
Время разгона
Это время, за которое система плавного пуска увеличит напряжение на выходе от начального до полного. Время разгона не должно быть слишком большим, поскольку это приведет к ненужному перегреву мотора и срабатыванию защитного реле. Если мотор не нагружен, фактическое время разгона, возможно, окажется меньше заданного, а если мотор сильно нагружен, время пуска, наоборот, может оказаться больше заданного.
Время выбега (время останова)
- задается, когда необходима плавная остановка мотора, например, при работе с насосами или ленточными конвейерами. Время выбега - это время, за которое напряжение на выходе системы снизится от полного до начального напряжения. Если время выбега равно нулю, это будет эквивалентно резкому снятию напряжения.
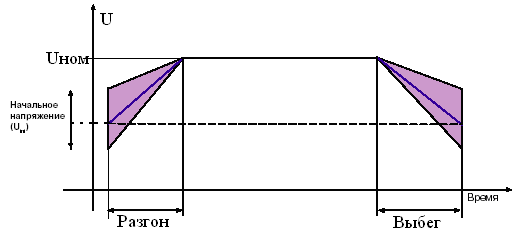
Рис.8. Основные настройки системы плавного пуска
Ограничение тока (рис.9) может использоваться в тех случаях, когда требуется ограничение пускового тока или при пуске под большой нагрузкой, когда трудно обеспечить хороший старт заданием только начального напряжения и времени разгона. При достижении предела ограничения тока система плавного пуска временно прекращает увеличение напряжения и возобновляет его, как только это позволит снизившийся в результате разгона ток.
Эта функция имеется не во всех системах плавного пуска.

Рис.9. Разгон с ограничением тока.
Последовательный пуск нескольких электродвигателей

Рис.10. Последовательный пуск нескольких двигателей от одного УПП.