

3.2. Частотное разделение сигналов
Частотное разделение сигналов заключается в том, что для каждого из «п» сигналов, подлежащих передаче, выделяется своя полоса частот: для сигнала №1 – F1, для сигнала №2 – F2 и так далее (рис. 3.4). Это значит, что при частотном разделении (частотном уплотнении) каждый сигнал занимает свой частотный интервал, не занятый другими сигналами, т.е. каждому из п сигналов, которые должны передаваться, присваивается своя частота: сигналу №1 – F1, сигналу №2 – F2 и сигналу №n – Fn.
На передающей стороне, в качестве которой в системе телеуправления является ПУ, помещаются генераторы частот Г1, ..., Гп, каждый из которых генерирует синусоидальное колебание соответствующей частоты f1, f2, ..., fп. Ключи К1, …, Кn служат командными устройствами, вырабатывающими команды телеуправления. Каждый полосовой фильтр ПФ1, …, ПФп, имеет центральную частоту, соответствующую частоте «своего» генератора.
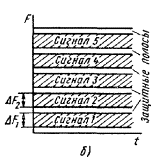
Рис. 3.4. Частотно-временная характеристика
частотного разделения сигналов
Технически такая передача, например, для телеуправления осуществляется следующим образом (рис. 3.5).
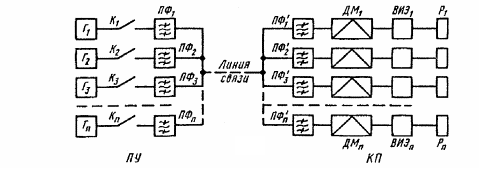
Рис. 3.5.Структурная схема системы телеуправления с частотным разделением сигналов
Г1, ..., Гn – генераторы гармонических колебаний; К1, …, Кn – ключи; ПФ1, …, ПФп – полосовые фильтры; ДМ1, …, ДМn – демодуляторы; ИЭ1, …, ВИЭn – выходные исполнительные элементы; Р1, …, Рn – электромеханические реле
На приемной стороне (КП) каждый из посланных сигналов выделяется сначала полосовым фильтром, настроенным на данную частоту, с него поступает на соответствующий демодулятор ДМ, после чего эта команда поступает на выходной исполнительный элемент ВИЭ, который в свою очередь включает «своё» электромеханическое реле Р.
Для
включения реле P1
нужно
замкнуть ключом К1
цепь генератора Г1,
который посылает в линию связи частоту
f1.
На КП этот сигнал проходит только через
фильтр ![]() и после выпрямления включает реле Р1.
и после выпрямления включает реле Р1.
Аналогично ключом К2 включается реле P2 и т.д., причём по линии связи можно одновременно передавать несколько сигналов и каждый сигнал будет принят только своим получателем информации. За время, равное длительности одного сигнала, могут быть переданы сразу все или несколько сигналов.
Ширина полосы частот каждого частотного сигнала (канала) определяется нестабильностью генератора, длительностью импульса (при импульсной передаче) и качеством фильтра. Стабильность генераторов и крутизна характеристики фильтров не могут быть идеальными, поэтому, во-первых, между частотными каналами предусмотрены защитные полосы, во-вторых, введены фильтры ПФ1, …, ПФп, препятствующие попаданию в линию связи сигналов с генераторов в случае значительного дрейфа их частот.
3.3. Частотно-временное разделение сигналов
Частотно-временное разделение сигналов заключается в том, что каждая позиция временного разделения уплотняется несколькими частотными каналами. Схема частотно-временного разделения сигналов сочетает схему временного разделения (см. рис. 3.2) и схему частотного разделения (см. рис. 3.4).
Частотно-временное разделение является производным от частотного и временного разделений, поэтому ему присущи достоинства и недостатки частотного и временного разделения.
Временное и частотное разделения сигналов являются основными в телемеханике. Сравнивать их можно по различным параметрам. Сравнение, например, по технической реализации показывает, что временное разделение хорошо реализуется на современных цифровых устройствах, это проще, чем реализация с использованием частотно-зависимых элементов, которыми являются генераторы гармонических колебаний и полосовые фильтры. Недостатком временного разделения является меньшее быстродействие, так как по линии связи предаётся только один сигнал.
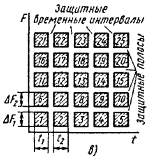
Рис. 3.6. Частотно-временная характеристика
частотно-временного разделения сигналов