

5.2. Амплитудная модуляция
Амплитудной модуляцией (АМ) называют образование сигнала путем изменения амплитуды гармонического колебания (несущей) пропорционально мгновенным значениям сообщения.
Будем рассматривать амплитудную модуляцию, при которой передаваемое сообщение является простейшим гармоническим колебанием uc=Ucost (рис. 5.1, а), где U – амплитуда колебания, а – угловая частота. Высокочастотный переносчик, или несущая, un= U0 cos0t, где 0 – угловая частота несущей, а U0 – ее амплитуда, представлен на рис. 5.1, б. Так как угловая частота сообщения определяется характером сообщения и поэтому является заданной, то при выборе угловой частоты несущей обязательно необходимо выполнение условия: величина много меньше величины 0.
Под воздействием сообщения на амплитуду несущей образуется новое колебание, в котором изменяется только амплитуда:
uАМ =UАМ cosω0t. (5.1)
Амплитуда несущей будет изменяться по линейному закону относительно амплитуды сообщения:
UАМ=Uω0 + kuc=Uω0+kU cost=Uω0(1 + mcost)…, (5.2)
где k – коэффициент пропорциональности, а m=kU/Uω0 =(Umax – Umin)/(Umax + Umin) – относительное изменение амплитуды несущей, называемое коэффициентом модуляции или глубиной модуляции (иногда его выражают в процентах).
Если амплитуда модулированного колебания возрастает до удвоенного значения по сравнению с амплитудой несущей, то глубина модуляции составляет 100%. Амплитудно-модулированное колебание будет соответствовать рис. 5.1, в. Подставляя в (5.1) значение амплитуды несущей из (5.2), получим
uАМ = Uω0(1 + m cost) cosω0t. (5.3)
Раскрывая скобки и учитывая, что
cost cosω0t =1/2 [cos (ω0 +)t + cos (ω0 – )t],
получим
 (5.4)
(5.4)
Из уравнения (5.4) следует, что результирующее амплитудно-модулированное колебание состоит из основного колебания несущей Uω0cosω0t и двух колебаний, отличающихся от несущей на частоту .
Основное колебание является колебанием, которое, как следует из (5.4), сохраняет частоту и амплитуду переносчика в процессе модуляции. Второй член в (5.4) представляет собой синусоиду, имеющую уменьшенную амплитуду (m/2)Uω0 и повышенную частоту (ω0 + ), и называется верхней боковой составляющей. Третий член в (5.4) – также синусоида, имеющая ту же уменьшенную амплитуду, но пониженную частоту (ω0 – ); она называется нижней боковой составляющей.
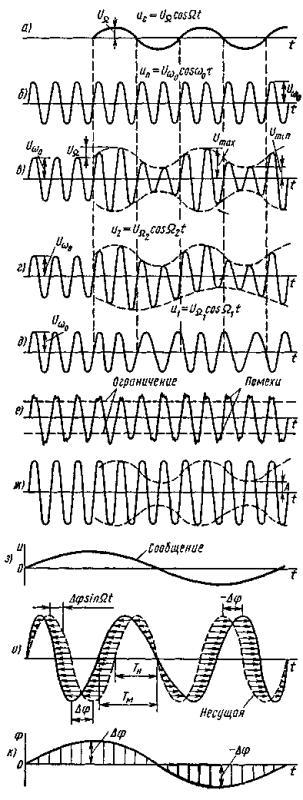
Рис. 5.1. Непрерывные типы модуляции:
а, з – передаваемые сообщения,б – несущая частота (переносчик),в, г,д – амплитудная, полярная и частотная модуляции соответственно,е – двустороннее ограничение, применяемое
в частотной модуляции для устранения помех, ж – график, показывающий, что при частотной модуляции из-за неизменяющейся амплитуды мощность передатчика используется лучше, чем при амплитудной,и – фазовая модуляция (пунктирная линия) переносчика (сплошная линия) сообщением, представленным на рис. 5.1,з– изменение фазы переносчика под воздействием сообщения
Из рис. 5.2, а, на котором представлен спектр амплитудно-модулированного сигнала, следует, что в процессе модуляции произошло смещение спектра сообщения F (показано пунктиром) на интервал частот, равный частоте ω0. Боковые составляющие располагаются симметрично по обе стороны несущей, и их амплитуды не превышают половины амплитуды несущей.
В зависимости от того, передается ли весь спектр амплитудно-модулированного колебания или только его часть, различают два способа амплитудной модуляции: амплитудную модуляцию с двумя боковыми полосами (ДБП) и однополосную амплитудную модуляцию (ОБП).