

8.4. Синфазирование в системах с временным разделением сигналов
Синфазирование – это переключение коммутаторов на следующую позицию в одни и те же моменты времени, равенство частот переключений.
Вследствие того, что генераторы тактовых импульсов на ПУ и КП не могут генерировать с идеальной точностью одну и ту же частоту, между ними всегда будет какое-то, пусть самое незначительное расхождение, которое можно выразить в процентах к длительности генерируемого импульса (см. рис. 8.3, в) [8].
Считается, что расхождение величиной ε =40% является пределом возможной устойчивой работы двух распределителей. Если положить нестабильность генераторов равной 0,001%, то при скорости передачи 50 Бод расхождение импульсов превысит значение 40% через 6 мин. 40 сек., и далее система выйдет из строя, так как нарушится синфазная работа. При скорости передачи 1200 Бод синфазность системы нарушится через 17 сек.
Расчет совместной стабильной работы генераторов можно произвести по формуле
tε=ε/(2KB), (8.3)
где ε – часть импульса (в процентах), в пределах которого допускается расхождение по фазе;
К – относительная нестабильность генераторов;
В – скорость передачи (в Бодах).
Применение более стабильных генераторов увеличивает время синфазной работы, но не решает проблемы в целом, так как предотвратить расхождение частот генераторов в течение длительного времени, на которое рассчитана работа системы телемеханики, невозможно.
Для обеспечения требуемых показателей синфазности необходимо применить специальные корректирующие устройства, поддерживающие расхождение генерируемых на ПУ и КП импульсов в определенных пределах. Работа корректирующего устройства будет различной в зависимости от того, по какой схеме генерируются импульсы и каким образом осуществляется коррекция.
Для получения большей стабильности частоты генераторы обычно выполняются как генераторы синусоидальных колебаний, из которых потом формируются импульсы нужной формы. Для удобства генерируемую частоту выбирают значительно выше частоты, требуемой для переключения генераторов. Для формирования импульсов движения генерируемая частота уменьшается до требуемой величины с помощью импульсных делителей.
По способу коррекции фазы существуют устройства с плавным управлением частоты генератора и устройства с дискретным управлением (рис. 8.5).
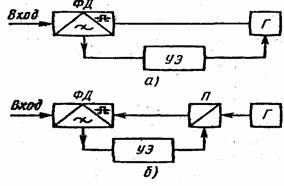
Рис. 8.5.Структурные схемы способов синфазирования:
а – способ плавного управления; б – способ дискретного управления
Общим элементом в них является фазовый дискриминаторФД, в котором измеряется величина рассогласования фаз между импульсами местного генератораГи принимаемыми импульсами. В соответствии с величиной рассогласования с выходаФДснимается величина рассогласования.
Управляющий элемент УЭ преобразует рассогласование с ФД в управляющее воздействие либо непосредственно на генератор, изменяя фазу его синусоидальных колебаний (рис. 8.5, а), либо на преобразователь П, где происходит подстройка фазы сформированных импульсов (рис. 8.5, б).
Устройства, в которых подстраивается фаза генерируемых синусоидальных колебаний, называют устройствами синфазирования с плавным управлением, а иногда устройствами с автоматической подстройкой частоты и фазы генератора или с «инерционной синхронизацией».
Устройства, в которых подстраивается фаза формируемых импульсов, называют устройствами синфазирования с дискретным управлением. Современным способом синфазирования является дискретное управление, суть которого отображена на диаграммах рис. 8.6.
На рис. 8.7, а показана принятая на ведомой стороне, в качестве которой используется, например, КП, последовательность импульсов, поступивших с ПУ, а на рис. 8.6, б, в – импульсы, снятые после формирователя на КП, но еще не поступившие на делитель частоты импульсов.
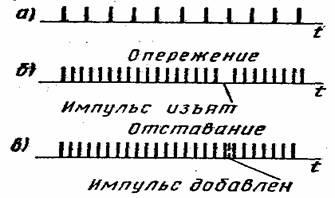
Рис. 8.6.Диаграммы синфазирования с дискретным управлением:
a – импульсы с ПУ; б – вычитание импульса при опережении частоты
генератора на КП; в – добавление импульса при отставании частоты
Принцип синфазирования заключается в следующем. Если частота импульсов на КП опережает частоту импульсов, генерируемых на ПУ, то из серии импульсов, приходящих на делитель КП, вычитается один импульс (рис. 8.6, б). Если же частота импульсов на КП отстает, то к ней добавляется один импульс (рис. 8.7, в, где дополнительный импульс обозначен пунктиром). Это вычитание и добавление импульсов может производиться многократно, пока частоты импульсов движения на ПУ и КП не совпадут.
Схема устройства синфазирования с дискретным управлением представлена на рис. 8.7.
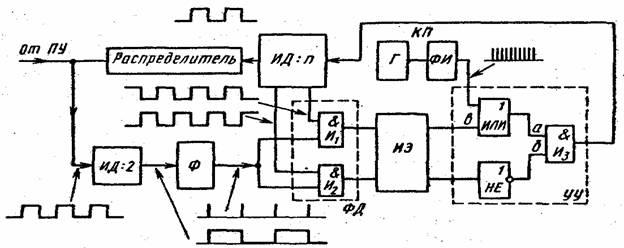
Рис. 8.7. Структурная схема устройства синфазирования с дискретным управлением
Поступающие с ПУ на КП импульсы делятся в импульсном делителе ИД:2, преобразуются в короткие импульсы в формирователе Ф и подаются на элементы И1, И2 фазового дискриминатора ФД (рис. 8.8, а-в).
Синусоидальное напряжение с установленного на КП генератора формируется в импульсы в формирователе ФИ, которые затем через элементы устройства управления УУ подаются в импульсный делитель ИД:n и с него на распределитель КП.
Импульсы с импульсного делителя ИД:n поступают как на распределитель, так и в виде двух последовательностей в противофазе на элементы И1, И2 схемы фазового дискриминатора ФД (рис. 8.8, г, д). На вторые входы тех же элементов подаются короткие импульсы с формирователя Ф, образованные по фронтам сигналов, принимаемых с ПУ.
Если генераторы работают синфазно, то короткие импульсы с формирователя Ф совпадают во времени с фронтами сигналов, поступающих с ИД:nна элементы И1и И2. Действительно, из рис. 8.8,а-дследует, что короткие импульсы возникают до того, как импульсы с ИД:nдостигнут амплитудного значения. Это означает, что на элементы И1, И2короткие импульсы и импульсы с ИД поступают не одновременно, вследствие чего с выходов элементов И1, И2 будут сняты логические 0. Эти сигналы через интегрирующий элемент ИЭ подаются на устройство управления УУ. Сигнал с выхода элемента И2инвертируется в элементе НЕ перед подачей на элемент И3, вследствие чего на входбэлемента И3будет подаваться логическая 1и этот элемент пропустит все импульсы, поступающие с формирователя ФИ через элемент ИЛИ на делитель ИД:n.
Если фаза генератора на КП опережает фазу генератора на ПУ, то короткие импульсы, сформированные из сигналов ПУ с помощью делителя ИД:2 и формирователя Ф совпадают с положительными импульсами, поступающими с ИД на элемент И2, на входе которого в моменты совпадения появляется сигнал 1. Этот сигнал, будучи инвертирован в 0 в элементе НЕ, на некоторое время запрещает с помощью элемента И3 прохождение импульсов с ФИ на ИД:n. Это приводит к тому, что очередной импульс с ФИ не поступает на ИД:n, что, в конечном счёте, смещает фазу импульсов движения в сторону отставания.
Если частота генератора на КП становится ниже частоты генератора на ПУ (рис. 8.8, к), то совпадение положительных импульсов произойдет на элементе И1 (рис. 8.8, л) и импульс с этого элемента поступит на элемент ИЛИ устройства УУ. Это означает, что на делитель ИД поступает дополнительный импульс (рис. 8.8, м). Каждый дополнительный импульс, подаваемый на делитель ИД:n, увеличивает фазу импульсов движения.
Практически приходящие с ПУ импульсы имеют искаженные фронты, и их длительность или увеличивается (см. рис. 8.8, а), или уменьшается при той же частоте. На рис. 8.9, а-д, который повторяет рис. 8.8, а-д, но в измененном виде, показано, что импульсы 1 и 2 с ПУ искажены в сторону отставания, а импульсы 3 и 4 – в сторону опережения (рис. 8.9, а).

Рис. 8.8.Временные диаграммы работы устройства синфазирования с дискретным управлением
Это приводит к тому, что даже при синхронной работе генераторов часть импульсов находится в фазе опережения (рис. 8.9,г), а часть – в фазе отставания (рис. 8.9,д).Это вызывает срабатывание фазового дискриминатора и добавление импульсов, идущих с генератора, или их вычитание. Иными словами, будет нарушаться синхронная работа генераторов.
Поскольку искажения фронтов импульсов носят случайный характер и равновероятны изменения как в одну, так и в другую сторону, уменьшение этого эффекта достигается включением интегрирующего элемента ИЭ (см. рис. 8.8). Этот элемент суммирует поступающие на него импульсы и формирует выходные сигналы на устройство управления УУ только тогда, когда число импульсов, пришедших на один вход, считающий опережение, превысит число импульсов, поступивших на другой вход, считающий отставание, на определенное заданное число.
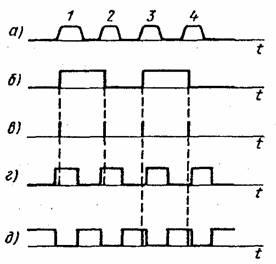
Рис. 8.9.Диаграммы процесса синфазирования при искажении фронтов импульсов
В качестве ИЭ можно использовать, например, регистр с двумя входами. Первый вход, считающий импульсы опережения, переключает регистр с первого по пятый элемент, а второй, считающий импульсы отставания, с пятого по первый. Если на первый вход приходит подряд пять импульсов, то регистр срабатывает и на устройство УУ приходит импульс. Если кроме пяти импульсов, поступающих на первый вход, в промежутках между ними будут поступать импульсы и на второй вход, то регистр переключится назад и на устройство УУ ничего не поступит.