

7.3. Теория потенциальной помехоустойчивости в.А. Котельникова
Помехоустойчивостью называют способность системы правильно принимать информацию несмотря на воздействие помех.
Теория помехоустойчивости элементарного сигнала при флуктуационных помехах разработана В.А. Котельниковым и развита рядом других ученых.
Под элементарным сигналом понимают любой сигнал, который может принимать значения максимума, что соответствует символу 1, или минимума, что соответствует символу 0. Таким элементарным сигналом может быть видео- или радиоимпульс.
Трансформация сигналов. Трансформация телемеханического сообщения – необнаруженное изменение телемеханического сообщения, возникшее в процессе передачи под воздействием помех и приводящее к приему ложного сигнала (ГОСТ 26.005-82). Элементарный сигнал может передавать дискретные сообщения типа команд. Во многих промышленных системах телемеханики, выполняющих функции ТУ-ТС, передача одного видео- или радиоимпульса означает передачу одной команды или одного сигнала телесигнализации.
Если команда, соответствующая сигналу 1, подавлена помехой, то это означает, что сигнал 1 трансформировался (перешёл) в сигнал 0. Вероятность подавления команды или сигнала телесигнализации обозначают Р10 (вероятность трансформации 1 в 0). Вероятность ложной команды или ложного сигнала телесигнализации возможна, если помеха возникает при отсутствии сигнала, т.е. когда посланный сигнал 0 трансформируется в сигнал 1 (P01).
Таким образом, при передаче элементарного сигнала 1 или 0 возможны два результата передачи:
а) правильная передача: при этом 1 переходит в 1, т.е. 1 1, а 0 – в 0, т.е. 00, обозначим Р(11) = Р11 и Р(00) = Р00;
б) неправильная передача: при этом 1 переходит в 0, т.е. 10, а 0 – в 1, т.е. 01, обозначим Р(10)=Р10 и P(0l)=P01.
Рассмотрим помехоустойчивость передачи элементарного сигнала при флуктуационных помехах. Наиболее высокой помехоустойчивостью обладает идеальный приемник В.А. Котельникова, который обеспечивает при данном способе передачи наилучшую помехоустойчивость, называемую потенциальной.
Потенциальная помехоустойчивость – предельно допустимая помехоустойчивость, которая может быть обеспечена идеальным приемником.
Идея построения идеального приемника заключается в следующем. Зная, какие сигналы должны быть переданы, например A1(t) и A2(t), и имея их образцы, создаваемые генераторами (рис. 7.5), сравнивают полученные сигналы по очереди с этими образцами и, вычисляя энергию разности принятого сигнала и образца этих сигналов, относят принятый сигнал к тому образцовому сигналу, для которого эта разность минимальна.
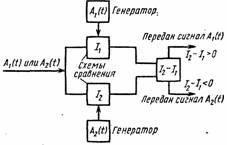
Рис. 7.5.Принцип построения идеального приемника В.А. Котельникова
Например, передаются два сигнала одинаковой длительности, но первый с большей, а второй с меньшей амплитудой. У идеального приемника тоже есть два таких сигнала, однако неизвестно, какой сигнал послан. Пришедший сигнал искажен помехами, но после сравнения, если окажется, что он ближе подходит к большему сигналу, считают, что был послан именно первый сигнал.
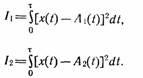
Это сравнение сигналов заключается в определении энергии разности между принятым сигналом x(t) и каждым из образцов передаваемых сигналов. Если, например, переданы сигналыA1(t) иA2(t) длительностьюτкаждый, то на приемной стороне необходимо вычислить интегралы:
 (7.4)
(7.4)
Сигналы A1(t) и A2(t) должны быть заранее известны на приемной стороне. Считают, что был передан тот сигнал, для которого значение Ii минимально, i=1,2. Если I2 – I1>0, то считают принятым сигнал A1, если I2 – I1<0, то сигнал A2. В тех случаях, когда опасность принять сигнал A1 вместо А2 и наоборот неодинакова, идеальный приемник должен сравнивать разность I2 –I1 не с нулем, а с некоторой величиной . Если I2 – I1>, то считают принятым сигнал A2, если I2 – I1<, то сигнал А1. Изменением значения величины можно регулировать соотношение вероятностей превращения одного сигнала в другой.
Вследствие того, что параметры помехи зависят от полосы пропускания приемника, вводят понятие удельной помехи
![]() (7.5)
(7.5)
где U п. ск – среднеквадратичное значение напряжения помехи;
F – полоса пропускания приёмника.
При этом величина, характеризующая потенциальную помехоустойчивость, равна отношению энергии сигнала к значению удельной помехи:
![]() (7.6)
(7.6)
Помехоустойчивость идеального приемника рассчитывают по формулам Котельникова [8]:
![]() (7.7)
(7.7)
где V – символ, обозначающий вероятностный интеграл, величины которого приведены в таблице [8];
= Uпор/Uп.ск. расчётный коэффициент;
Uпор – пороговое значение сигнала.
При симметричном канале, когда вероятности подавления команды и образования ложной команды одинаковы,
![]() (7.8)
(7.8)
Котельниковым В.А. создана методика и выполнены расчёты потенциальной помехоустойчивости для различных способов передачи при флуктуационных помехах.