

5.4. Двукратная непрерывная модуляция
Для повышения помехоустойчивости передачи применяется двукратная модуляция. Например, амплитудно-модулированное сообщение дополнительно модулируют по частоте. Возникает двойная модуляция АМ-ЧМ. Из рис. 5.6 следует, что сначала сообщением модулируется по амплитуде первый переносчик, который называется поднесущей (рис. 5.6, б). Для наглядности частота переносчика взята соизмеримой с частотой сообщения.
Далее амплитудно-модулированный сигнал (рис. 5.6, в) как сообщение модулирует второй переносчик, или несущую (рис. 5.6, г), в результате чего возникает сигнал, модулированный по частоте (рис. 5.6, д). Иногда применяют модуляцию ЧМ-АМ, при которой помехоустойчивость обеспечивается ЧМ, а экономия полосы частот – АМ.
При этом первая поднесущая (рис. 5.6, б) модулируется сообщением (рис. 5.6, а) по частоте (рис. 5.6, е), а затем частотно-модулированный сигнал модулирует новую несущую (второй переносчик) по амплитуде (рис. 5.6, ж). На рис. 5.6, ж пунктирная огибающая повторяет частотно-модулированный сигнал, изображенный на рис 5.6, е. По такому же принципу образуется и двойная модуляция ЧМ-ЧМ.
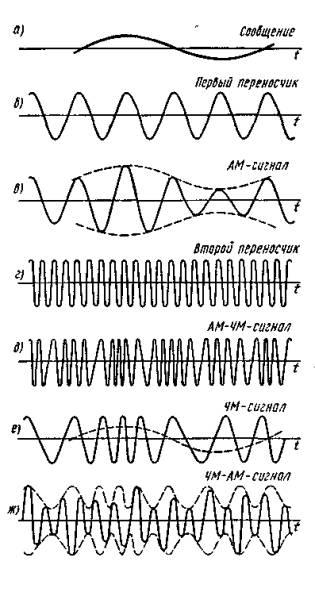
Рис. 5.6.Методы двукратных непрерывных модуляций.
а – передаваемое сообщение, б – первый переносчик (поднесущая), в – АМ-сигнал, г – второй переносчик (несущая), д – АМ-ЧМ-сигнал, е – ЧМ-сигнал,
ж – ЧМ-АМ-сигнал
5.5. Импульсные методы модуляции
Дословно «импульс» в переводе с латинского означает «толчок». Под импульсом понимают кратковременное воздействие электрического тока или напряжения на схему или устройство.
Последовательность импульсов характеризуется рядом параметров: амплитудой, длительностью, положением во времени, числом импульсов и т.д.
Используя последовательность импульсов в качестве переносчика, каждый из этих параметров можно изменять под воздействием сообщения, тем самым осуществляя так называемую импульсную модуляцию. Так как такой переносчик имеет много параметров, то и число импульсных методов модуляции достаточно велико. Это означает, что последовательность импульсов, будучи использованной в качестве переносчика, позволяет образовывать множество различных дискретных сигналов для передачи непрерывных сообщений.
5.5.1. Амплитудно-импульсная модуляция
Амплитудно-импульсная модуляция (АИМ) – это изменение амплитуды импульсной последовательности пропорционально мгновенному значению сообщения.
На рис. 5.7, а представлено передаваемое сообщение, а на рис. 5.7, б – его переносчик – последовательность прямоугольных импульсов. Под воздействием мгновенных значений сообщения (тока или напряжения) амплитуда импульсов переносчика изменяется, как показано на рис. 5.7, в. Можно записать:
UM =U(1 + mA sinΩt), (5.14)
где UM – амплитуда модулированных импульсов; U – амплитуда немодулированных импульсов; mA – глубина модуляции при АИМ; Ω – угловая частота сообщения.

Рис. 5.7.Методы импульсной модуляции:
а – передаваемое сообщение; б – переносчик сообщения; в – аплитудно-импульсная модуляция (АИМ); г – широтно-импульсная модуляция (ШИМ);
д – фазоимпульсная модуляция (ФИМ); е – частотно-импульсная модуляция (ЧИМ)
Из-за плохой помехоустойчивости и погрешностей, возникающих при изменении коэффициента передачи линий связи, АИМ применяется в ТИ только как промежуточный вид модуляции, например, в системе АИМ-ЧМ.