

Введение
Во многих случаях возникает необходимость контролировать состояние и управлять режимами работы современных объектов, которые рассредоточены на больших площадях или расстояниях. Это магистральные продуктопроводы, нефтяные и газовые месторождения, электрические сети, железнодорожные магистрали и другие. Такие объекты управления отличаются от обычных объектов одним фактором – расстоянием между объектом контроля или управления и местом, с которого производится управление, где вырабатываются команды управления или отображается состояние объектов.
Применение обычных систем автоматического управления для таких объектов оказывается неэффективным, так как каждый объект требует отдельного канала связи, по которому передаются сигналы от объекта до места выработки команд и обратно. Кроме того, передача на большие расстояния сигналов контроля и управления сопровождается их искажением.
Чтобы преодолеть влияние фактора расстояния и сделать это наиболее экономичным способом, применяются специальные системы, получившие название телемеханических систем. Поэтому целью настоящей дисциплины является изучение принципов построения, отличительных особенностей, типовых задач, решаемых при создании систем телемеханики.
Изучение теоретических вопросов дополняется выполнением курсового проекта, работа над которым позволяет закрепить получаемые знания практическим проектированием.
1. Предмет телемеханики
1.1. Определение, особенности и основные проблемы телемеханики
Термин «телемеханика», введенный в 1905 г. французским инженером Э. Бранли, состоит из двух греческих слов: Tе1е – далеко и Mechanike – мастерство, или наука о машинах.
Телемеханика – отрасль науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразователей сигналов для эффективного использования каналов связи.
В телемеханике передача информации осуществляется без непосредственного участия человека, человек-оператор находится в пункте управления, где принимает информацию о состоянии контролируемых объектов, а также может вырабатывать команды управления. Однако в некоторых областях применения телемеханики (медицина, космос, спорт и т.п.) человек находится на обеих сторонах передачи, но на одной из сторон он является объектом контроля.
Кроме телемеханики, имеется ряд отраслей техники, занимающихся передачей информации – телеграф, телефон, телевидение и др. Хотя научные основы всех методов и средств передачи информации, в том числе телемеханики, базируются на общей теории связи и теории информации, промышленная телемеханика имеет следующие особенности, отличающие телемеханику от перечисленных средств связи:
1. Необходимость высокой точности передачи информации. Например, системы телеизмерений могут иметь точность до 0,05%.
2. Недопустимость большого запаздывания в передаче информации при управлении, так как длительная задержка передаваемых сообщений в телемеханике в ряде случаев может вызвать аварию.
3. Необходимость большой надежности в передаче команд, так как ошибки при передаче команд могут привести к аварии. Отсюда – требование к большей достоверности передачи информации. Так, в телеуправлении допустимая вероятность возникновения ложной команды составляет величину порядка 10-14, что намного выше требований к достоверности передачи в других видах связи [1].
4. Отличие входных и выходных устройств систем телемеханики от таких же устройств в системах связи. Источниками информации в устройствах телемеханики являются датчики, командные устройства, а в системах связи – микрофон, передающая телевизионная камера.
5. Централизованность передачи информации. В телемеханике передача информации, как правило, осуществляется от объектов, которые рассредоточены на большой площади или расстоянии, в единый пункт управления, где находится человек-оператор или управляющий вычислительный комплекс.
При передаче телемеханической информации можно выделить следующие проблемы:
1) достоверности, т.е. передачи информации с малыми искажениями, возникающими как в аппаратуре, так и при передаче по линии связи из-за помех;
2) эффективности, т.е. нахождения способов лучшего использования аппаратуры и линии связи при передаче большого количества информации;
3) экономичности, т.е. построения простых и дешевых устройств телемеханики, обеспечивающих наибольшее количество передаваемой информации при наименьшей затрате средств.
Исходя из определения телемеханики структурную схему системы телемеханики можно представить в виде, отображённом на рис. 1.1. Как видно из рисунка, основными составляющими системы телемеханики (СТМ) являются устройство пункта управления, линии связи и устройство контролируемого пункта. В телемеханике широко используются следующие понятия.
Контролируемый телемеханический пункт (КП) – место размещения объектов, контролируемых или управляемых средствами телемеханики.
Телемеханический пункт управления (ПУ) – это место, с которого осуществляется управление или контроль состояния объектов, расположенных на контролируемом пункте. При частичной автоматизации в пункте управления находится диспетчер.
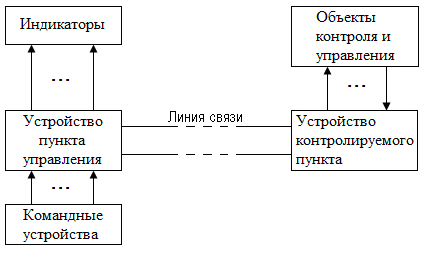
Рис. 1.1.Структурная схема системы телемеханики
Устройство телемеханики – совокупность технических средств телемеханики, расположенных на телемеханическом пункте управления или контролируемом телемеханическом пункте.
Комплекс устройств телемеханики – совокупность устройств пунктов управления и контролируемых пунктов, предназначенных для совместного применения в телемеханических системах.
Телемеханическая система – совокупность устройств пунктов управления и контролируемых пунктов, периферийного оборудования, необходимых линий и каналов связи, предназначенных для совместного выполнения телемеханических функций.