

3 Специальная часть
3.1 Обоснование модернизации
В данной теме дипломного проекта в базовом варианте системы управления используется релейно – контакторная схема с асинхронным двигателем с фазным ротором. Эта система в настоящее время устарела, поэтому мы заменим её на асинхронный двигатель с короткозамкнутым ротором и преобразователем частоты.
Для осуществления возможности регулирования момента и скорости в современных электроприводах используются следующие методы частотного управления, такие как:
– Векторное;
– Скалярное.
При скалярном управлении как правило, в качестве независимого воздействия выступает частота, а напряжение при определенной частоте определяется видом механической характеристики, а также значениями критического и пускового моментов. Благодаря скалярному управлению обеспечивается постоянная перегрузочная способность асинхронного двигателя, независящая от частоты напряжения, и все же при довольно низких частотах. Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей. Скалярный способ управления позволяет осуществлять легкую регулировку, даже при использовании заводских настроек.
Скалярное управление асинхронным двигателем довольно просто реализуется, но все же имеются два значительных недостатка. Во–первых, если на валу не установлен датчик скорости, то невозможно осуществлять регулирование значения скорости вращения вала, поскольку она зависит от воздействующей на электропривод нагрузки. Установка датчика скорости с легкостью решает данную проблему, но еще одним значительным недостатком остается – отсутствие возможности регулирования значения момента на валу двигателя.
Векторный тип управления. Векторное управление — метод управления асинхронными двигателями, не только формирующим гармонические токи (напряжения) фаз, но и обеспечивающим управление магнитным потоком ротора (моментом на валу двигателя). Векторное управление применяется в случае, когда в процессе эксплуатации нагрузка может меняться на одной и той же частоте, т.е. нет четкой зависимости между моментом нагрузки и скоростью вращения, а также в случаях, когда необходимо получить расширенный диапазон регулирования частоты при номинальных моментах, например, 0…50 Гц для момента 100% или даже кратковременно 150–200% от Мном, это позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя. Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление». Векторный способ управления преобразователем частоты позволяет осуществлять гораздо более качественное управление электродвигателем, нежели скалярный. Зато настройка такого преобразователя требует глубоких познаний в области устройства электропривода и электрических машин.
Векторный метод работает нормально, если введены правильно паспортные величины двигателя и успешно прошло его автотестирование. Векторный метод реализуется путем сложных расчетов в реальном времени, производимых процессором преобразователя на основе информации о выходном токе, частоте и напряжении.
Для модернизации было принято взять метод скалярного управления двигателем, который наиболее прост в проектировании, наладке, эксплуатации.
3.2 Функциональная схема
Функциональная схема представлена на рисунке 3.1.
Рисунок
3.1 – Функциональная схема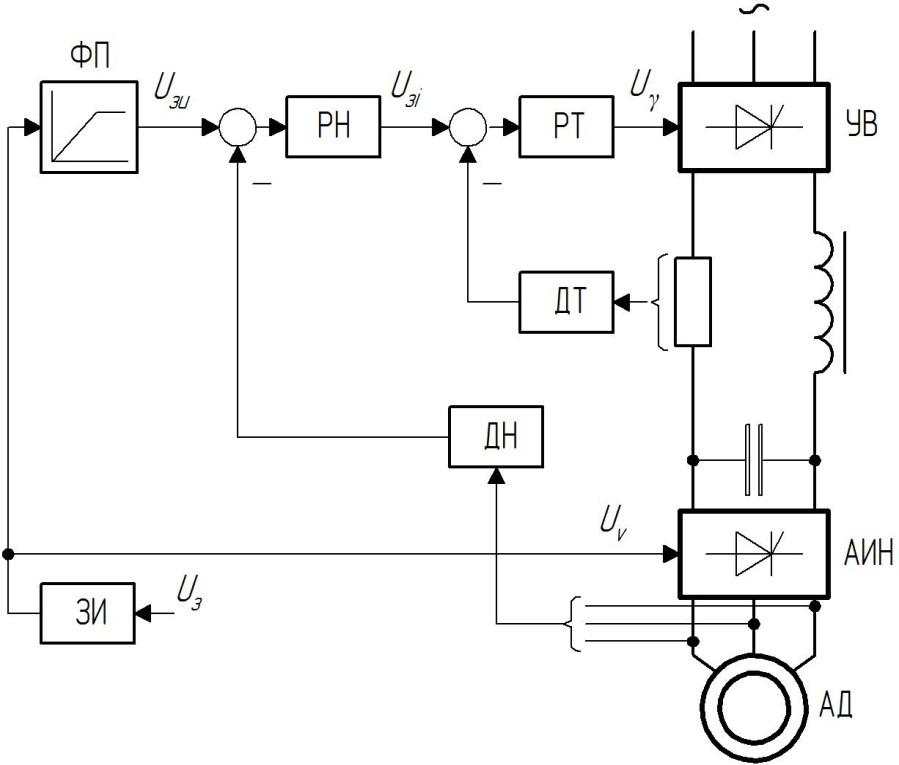
На рисунке обозначено:
ФП– функциональный преобразователь;
РН – регулятор напряжения;
РТ – регулятор тока;
ДТ – датчик тока;
ДН – датчик напряжения;
УВ – управляемый выпрямитель;
АИН – автономный инвертор напряжения;
ЗИ – задатчик интенсивности;
АД – асинхронный двигатель.
3.3 Структурная схема
Структурная
схема изображена на рисунке 3.2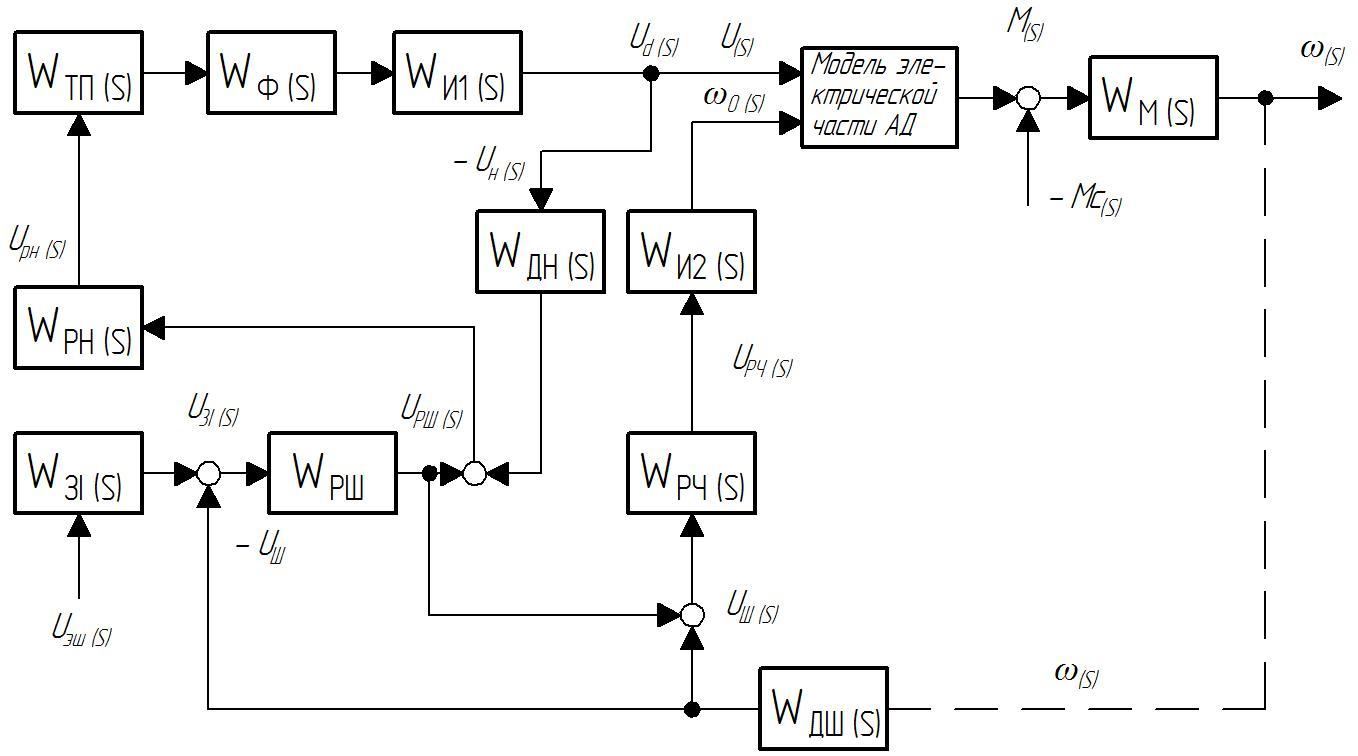
Рисунок 3.2 – Структурная схема модернизированной электромеханической системы
Описание структурной схемы основывается на описании функциональной схемы.
3.4 Выбор двигателя
Для модернизированной системы было принято решение замены установленного асинхронного двигателя с фазным ротором на асинхронный двигатель с коротко замкнутым ротором фирмы siemens. Это было сделано на основании решения о построении системы управления ТПЧ–АД по закону U / f = const. А как известно такая система требует двигателя с коротко замкнутым ротором, который менее требователен к условиям работы, проще в исполнении и дешевле в изготовлении.
Паспортные данные выбранного двигателя приведены в таблице 3.1
Таблица 3.1 – Паспортные данные двигателя 1LG4250M
|
Тип двигателя |
1LG4250M |
|
Мощность, кВт |
30 |
|
Максимальная частота вращения n0, об/мин. |
730 |
|
Номинальное напряжение питания, В |
380 |
|
Кратность пускового тока Iп` |
5,5 |
|
Скольжение номинальное Sn |
0,026 |
|
Номинальный ток, А |
58 |
|
Момент инерции двигателя J1, кг∙м2 |
0,84 |
|
Mmax/Mн = λк |
2,6 |
|
Mпуск/Mн = λп |
2,3 |
|
КПД |
91,4 |
|
|
0,81 |

Условие предварительности выбора
двигателя по мощности с соответствующей
 :
:



Здесь предварительно проверяется двигатель по перегрузочной способоности


Где
 –
максимальный момент выбранного двигателя,
Нм
–
максимальный момент выбранного двигателя,
Нм
 –
максимальный статический момент из
статической диаграммы, Нм
–
максимальный статический момент из
статической диаграммы, Нм
Номинальная частота вращения вала двигателя выбирается из условия
 об/мин
об/мин

Поэтому в инженерных расчетах динамический момент при пуске принимают равным среднему:
 ,
,
Где


 –максимальный
пусковой момент, Нм;
–максимальный
пусковой момент, Нм;
 –
кратность максимального пускового
момента;
–
кратность максимального пускового
момента;
 –
номинальный момент Нм,
–
номинальный момент Нм,
 ,
Нм
,
Нм
 –Минимальный
пусковой момент (момент переключения
),Нм;
–Минимальный
пусковой момент (момент переключения
),Нм;
 –
кратность минимального пускового
момента:
–
кратность минимального пускового
момента:
Кратность
 максимального пускового момента
принимается в зависимости от режимов
работы (таблица 2.3)
максимального пускового момента
принимается в зависимости от режимов
работы (таблица 2.3)



Суммарный приведенный момент инерции


Где
 –
коэффициент учитывающий моменты инерции
масс деталей, вращающихся медленнее,
чем вал двигателя (шестерен редуктора,
соединяемых муфт, валов и др.),
–
коэффициент учитывающий моменты инерции
масс деталей, вращающихся медленнее,
чем вал двигателя (шестерен редуктора,
соединяемых муфт, валов и др.),
m– масса поступательно движущихся масс (масса груза ), кг;
 –
рабочая частота вращения вала двигателя
, об/мин;
–
рабочая частота вращения вала двигателя
, об/мин;
 –
момент инерции ротора двигателя;
–
момент инерции ротора двигателя;
Тормозной момент

Уточненное значение продолжительности включения:
Эквивалентная мощность, соответствующая
 и
расчетной ПВ кВт
и
расчетной ПВ кВт
Выбранный двигатель не будет нагреваться выше допустимой температуры, если



Условие проверки по перегрузочной способности:

Здесь
 –
коэффициент, учитывающий снижение
напряжение питающей сети. При снмжении
Г на 10% от
–
коэффициент, учитывающий снижение
напряжение питающей сети. При снмжении
Г на 10% от – номинального для асинхронных двигателей
– номинального для асинхронных двигателей
 –
максимально допустимый момент
(критический) по условиям устойчивости
АД, определяется по справочным данным.
–
максимально допустимый момент
(критический) по условиям устойчивости
АД, определяется по справочным данным.
 –
максимальный статический момент
сопротивления на валу двигателя, Нм;
–
максимальный статический момент
сопротивления на валу двигателя, Нм;
а – допустимое линейное ускорение

 –
динамический момент, Нм,
–
динамический момент, Нм,


3.5 Выбор микроконтроллера
Для модернизированной системы было принято решение взять микроконтроллер SIMATICS7 – 400.
На рисунке 3.3 приведен общий вид микроконтроллера SIMATIC S7 –400.
Рисунок 3.3 – общий вид микроконтроллера
SIMATIC S7
–400
SIMATIC S7 – 400 — это модульный программируемый контроллер, предназначенный для построения систем автоматизации средней и высокой степени сложности. Модульная конструкция, работа с естественным охлаждением, возможность применения структур локального и распределенного ввода–вывода, широкие коммуникационные возможности, удобство эксплуатации и обслуживания обеспечивают возможность получения рентабельных решений для построения систем автоматического управления в различных областях промышленного производства Эффективному применению контроллеров способствует возможность использования нескольких типов центральных процессоров различной производительности, наличие широкой гаммы модулей ввода–вывода дискретных и аналоговых сигналов, функциональных модулей и коммуникационных процессоров. SIMATIC S7 – 400 является универсальным контроллером. Он отвечает самым жестким требованиям промышленных стандартов, обладает высокой степенью электромагнитной совместимости, высокой стойкостью к ударным и вибрационным нагрузкам.
Обзор:
– возможность замены любого модуля без полного выключения;
– удобная структура устройства и качественная система естественного охлаждения;
– возможность увеличить функциональность устройства при помощи усовершенствования АСУ;
– значительная мощность устройства, которая достигается огромным числом встроенных функций
Области применения:
S7 – 400 находит применение в машиностроении, автомобильной промышленности, в складском хозяйстве, в технологических установках, системах измерения и сбора данных, в текстильной промышленности, на химических производствах и т.д.
Данные центрального процессора представлены в таблице 3.2
Таблица 3.2 данные процессора
|
Технические характеристики центрального процессора |
CPU 416 – 5H | |
|
Объём встроенного ОЗУ программа/данные |
6 / 10 МБ | |
|
Объём загружаемой памяти RAM |
512 КБ | |
|
Время выполнения операций с битами и словами / числами с фиксированной точкой / числами с плавающей точкой, нс |
12 / 12 / 25 | |
|
Интерфейс |
1xMPI/DP | |
|
Адресные области (входы/выходы) | ||
|
Адресная область периферии в целом |
16 Кбайт / 16 Кбайт включая диагностические адреса | |
|
Интерфейс MPI/DP |
2 Кбайта / 2Кбайта | |
|
Интерфейс DP |
8 Кбайт / 8 Кбайт | |
|
Образ процесса |
16 Кбайт / 16 Кбайт | |
|
По умолчанию |
512 байт / 512 байт | |
|
Число разделов образа процесса |
Макс. 15 | |
|
Согласованные данные |
Макс. 244 байта | |
|
Цифровые каналы |
Макс. 131072 / Макс. 131072 | |
|
в т.ч. централизованные |
Макс. 131072 / Макс. 131072 | |
|
Аналоговые каналы |
Макс. 8192 / Макс. 8192 | |
|
в т.ч. централизованные |
Макс. 8192 / Макс. 8192 | |
|
| ||
Технические данные модуля ввода дискретных сигналов представлены в таблице 3.3
Таблица 3.3 – технические данные модуля ввода дискретных сигналов 6ES7 422– 1BH11–0AA0
|
Напряжения и токи | |
|
Внешнее напряжение питания L+: |
– |
|
– |
|
– |
|
– |
|
Потребляемый ток, не более: |
|
|
– от внутренней шины контроллера |
20 мА |
|
Потребляемая мощность, типовое значение |
6.0 Вт |
|
Дискретные входы | |
|
Количество входов: |
32 |
|
–количество входов в группах |
1х32 |
|
Количество одновременно обслуживаемых входов: |
|
|
– горизонтальная установка, до 60°C |
32 |
|
–вертикальная установка, до 40°C |
32 |
|
Длина входной линии, не более: |
|
|
–обычный кабель (длина/ задержка распространния сигнала) |
600 м |
|
–экранированный кабель |
1000 м |
|
Входное напряжение: |
|
|
– номинальное значение |
=24 В |
|
– высокого уровня |
13…30 В |
|
– низкого уровня |
–30…+5 В |
|
– частота переменного тока |
– |
|
Входной ток: |
|
|
– высокого уровня |
7 мА |
|
– низкого уровня |
– |
|
Задержка распространения входного сигнала: |
|
|
– от низкого уровня к высокому |
1.2 … 4.8 мс |
|
– от высокого уровня к низкому |
1.2 … 4.8 мс |
|
– конфигурирование задержки |
Нет |
Технические данные модуля вывода дискретных сигналов представлены в таблице 3.4
Таблица 3.4 – технические данные модуля вывода дискретных сигналов PS 405
|
Напряжения и токи | |
|
Внешнее напряжение питания L+: |
– |
|
– |
|
– |
|
Потребляемый ток, не более: |
|
|
– от внутренней шины контроллера |
20 мА |
|
Потребляемая мощность, типовое значение |
6.0 Вт |
|
| |
|
Дискретные выходы | |
|
Количество выходов: |
16 |
|
количество выходов в группах |
2х8 |
|
Длина соединительной линии, не более: |
|
|
обычный кабель |
600 м |
|
экранированный кабель |
1000 м |
|
Ограничение индуктивных перенапряжений, не более |
UL+ - 30 В |
|
Ламповая нагрузка на выход, не более |
10 Вт |
|
Защита от коротких замыканий: |
Электронная |
|
ток срабатывания защиты/ предохранителя |
2.8 … 6 А |
|
Выходное напряжение высокого уровня, не менее |
UL+ - 0.5 В |
|
Выходной ток: |
|
|
высокого уровня: |
|
|
- номинальное значение |
2.0 А |
|
- допустимый диапазон изменений |
5 мА…2.4 А |
|
- допустимый импульсный ток, не более |
- |
|
низкого уровня, не более |
0.5 мА |
|
длительно допустимый ток через контакт реле |
- |
|
минимальный ток через контакт реле |
- |
|
Частота переключений, не более: |
|
|
при активной нагрузке |
100 Гц |
|
при индуктивной нагрузке по IEC 947-51, DC 13 |
0.2 Гц при 1 А; |
|
|
0.1 Гц при 2 А |
|
при ламповой нагрузке |
10 Гц |
|
Суммарный выходной ток, не более: |
|
|
горизонтальная установка, до 40°C |
3 А на 2 эквипотенциальных выхода |
|
горизонтальная установка, до 60°C |
2 А на 2 эквипо- тенциальных вы- хода |
Технические данные блока питания представлены в таблице 3.5
Таблица 3.5 – технические данные модуля
|
SIMATIC S7-400, cтандартное исполнение |
6ES7 405-0DA02-0AA0 |
|
Входное напряжение: |
|
|
– номинальное значение
– статический диапазон изменений динамический диапазон изменений Допустимый перерыв в питании Входной ток: номинальное значение (Iн) короткого замыкания Выходное напряжение: номинальное значение допустимые отклонения
Номинальное значение выходного тока: источника питания =5 В источника питания =24В Минимальный базисный выходной ток: источника питания =5 В источника питания =24В Защита от короткого замыкания Класс защиты Гальваническое разделение входных и выходных цепей Потребляемая мощность Рассеиваемая мощность Буферные батареи (по заказу)
Количество разъемов для подключения к стойке ПЛК Габариты Масса Сечение и наружный диаметр проводников линии пита- ния модуля: жесткий провод гибкий провод |
=24/48/60 В
19.2…71 В 19.2…71 В 4.5 мс ± 0.5 мс
2А 15Iн
=5.1 В/ =24 В =5 В +2%/-0.5% =24 В ± 5%
4 А 0.5 А
100 мА 0 Есть |
|
– статический диапазон изменений |
19.2…71 В |
|
– динамический диапазон изменений допустимый перерыв в питании Входной ток: номинальное значение (Iн) короткого замыкания Выходное напряжение: номинальное значение допустимые отклонения
Номинальное значение выходного тока: источника питания =5 В источника питания =24В Минимальный базисный выходной ток: источника питания =5 В источника питания =24В Защита от короткого замыкания Класс защиты Гальваническое разделение входных и выходных цепей Потребляемая мощность Рассеиваемая мощность Буферные батареи (по заказу)
Количество разъемов для подключения к стойке ПЛК Габариты Масса Сечение и наружный диаметр проводников линии пита- ния модуля: жесткий провод гибкий провод |
19.2…71 В 4.5 мс ± 0.5 мс 2А 15Iн
=5.1 В/ =24 В =5 В +2%/-0.5% =24 В ± 5%
4 А 0.5 А
100 мА 0 Есть |
|
Допустимый перерыв в питании Входной ток: номинальное значение (Iн) короткого замыкания Выходное напряжение: номинальное значение допустимые отклонения
Номинальное значение выходного тока: источника питания =5 В источника питания =24В Минимальный базисный выходной ток: источника питания =5 В источника питания =24В Защита от короткого замыкания Класс защиты Гальваническое разделение входных и выходных цепей Потребляемая мощность Рассеиваемая мощность Буферные батареи (по заказу)
Количество разъемов для подключения к стойке ПЛК Габариты Масса Сечение и наружный диаметр проводников линии пита- ния модуля: жесткий провод гибкий провод |
4.5 мс ± 0.5 мс 2А 15Iн
=5.1 В/ =24 В =5 В +2%/-0.5% =24 В ± 5%
4 А 0.5 А
100 мА 0 Есть |
|
Входной ток: |
|
|
номинальное значение (Iн) короткого замыкания Выходное напряжение: номинальное значение допустимые отклонения
Номинальное значение выходного тока: источника питания =5 В источника питания =24В Минимальный базисный выходной ток: источника питания =5 В источника питания =24В Защита от короткого замыкания Класс защиты Гальваническое разделение входных и выходных цепей Потребляемая мощность Рассеиваемая мощность Буферные батареи (по заказу)
Количество разъемов для подключения к стойке ПЛК Габариты Масса Сечение и наружный диаметр проводников линии пита- ния модуля: жесткий провод гибкий провод |
2А
=5.1 В/ =24 В =5 В +2%/-0.5% =24 В ± 5%
4 А 0.5 А
100 мА 0 Есть |
|
короткого замыкания Выходное напряжение: номинальное значение допустимые отклонения
Номинальное значение выходного тока: источника питания =5 В источника питания =24В Минимальный базисный выходной ток: источника питания =5 В источника питания =24В Защита от короткого замыкания Класс защиты Гальваническое разделение входных и выходных цепей Потребляемая мощность Рассеиваемая мощность Буферные батареи (по заказу)
Количество разъемов для подключения к стойке ПЛК Габариты Масса Сечение и наружный диаметр проводников линии пита- ния модуля: жесткий провод гибкий провод |
15Iн =5 В +2%/-0.5% =24 В ± 5%
4 А 0.5 А
100 мА 0 Есть |
|
Выходное напряжение: |
4.5 мс ± 0.5 мс 2А 15Iн
=5.1 В/ =24 В =5 В +2%/-0.5% =24 В ± 5%
4 А 0.5 А
100 мА 0 Есть |
|
– номинальное значение |
=5.1 В/ =24 В |
|
– допустимые отклонения |
=5 В +2%/-0.5% |
|
Номинальное значение выходного тока: |
|
|
– источника питания =24В |
0.5 А |
|
Защита от короткого замыкания |
Есть |
|
Класс защиты |
I с защитой проводников в соответствии с IEC 536, VDE 0106, часть 1 |
|
Гальваническое разделение входных и выходных цепей |
Есть |
|
Потребляемая мощность |
48 Вт |
|
Рассеиваемая мощность |
16 Вт |
|
Количество разъемов для подключения к стойке ПЛК |
1 |
3.4 Функциональная схема автоматизации
Функциональная схема автоматизации представлена на рисунке 3.4.
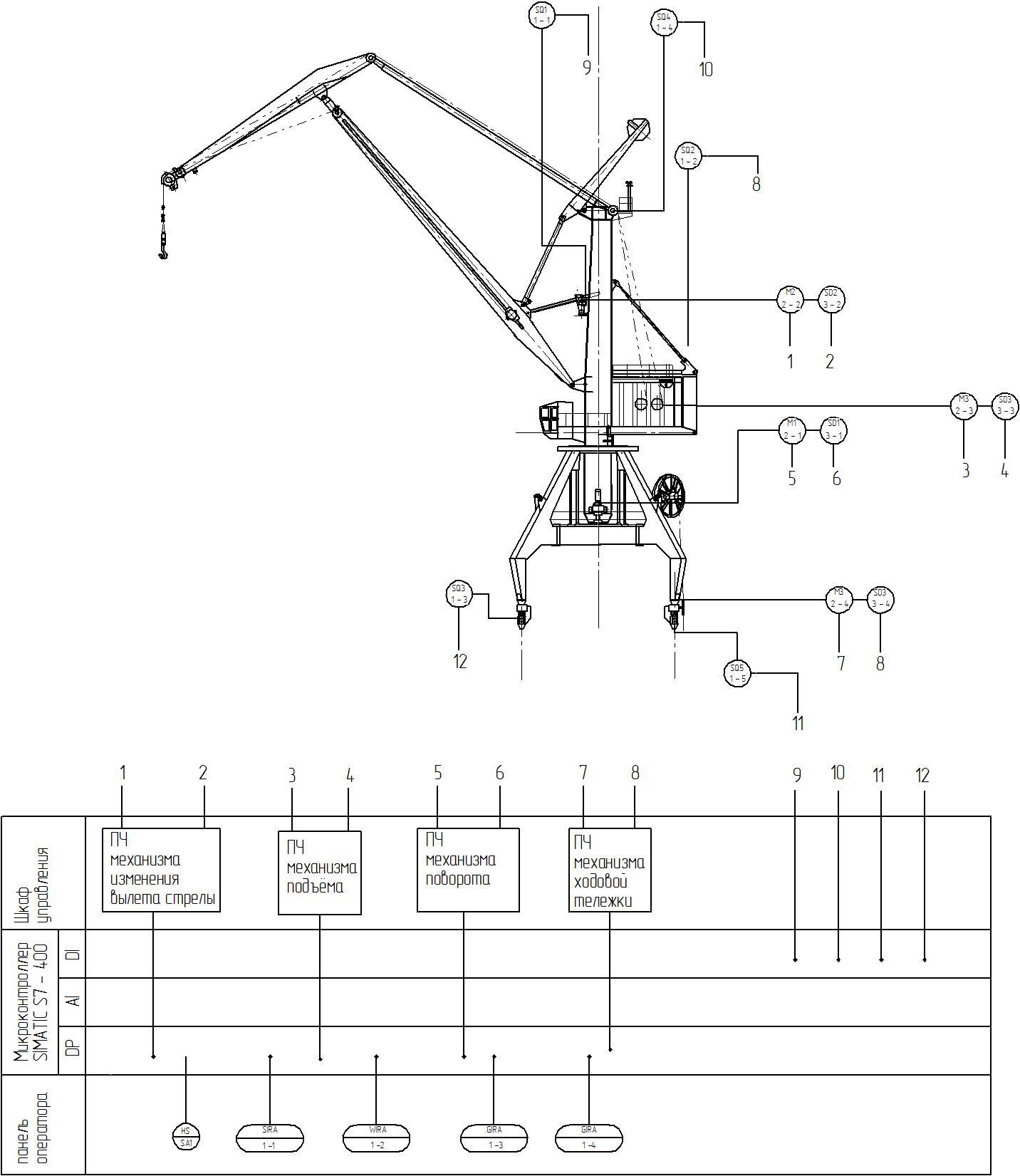 Рисунок
3.4 – Функциональная схема портального
крана
Рисунок
3.4 – Функциональная схема портального
крана
ПЧ – преобразователь частоты;
M – асинхронный двигатель;
SD – датчик скорости;
SA – пульт управления;
SIRA – контроль, индикация, регистрация, скорости.
WIRA – контроль, индикация, регистрация, веса.
GIRA – контроль, индикация, регистрация, положения.
3.6Выбор преобразователя частоты и его комплектующих для модернизированной системы
Условие выбора преобразователя частоты по мощности:


Условие выбора преобразователя частоты по максимальному выходному току:
