

ВВЕДЕНИЕ
Кранами называются грузоподъемные устройства, служащие для вертикального и горизонтального перемещения грузов на не большие расстояния. По особенностям конструкции, связанным с назначением и условиями работы, краны разделяются на мостовые, портальные, козловые, башенные и др. В зависимости от вида транспортируемых грузов на портальных кранах используют различные грузозахватывающие устройства: крюки, грейфер, автоматическое захватное устройство и т.п. Портальные краны достаточно часто используются по всем территориям, поскольку они достаточно легко передвигаются и имеют массу прекрасных рабочих характеристик. Во первых их грузоподъемность имеет достаточно высокие показатели, а именно в зависимости от модели крана она может варьироваться в пределах от восьмидесяти до трехсот тонн, что является достаточно высоким показателем. Достаточно широко используются такие виды кранов в такой отрасли как судостроительство и другие монтажные работы в порту. Питание электромагнита, подвешиваемого к крюку осуществляется с помощью гибкого кабеля, для намотки которого на кране установлен кабельный барабан, приводимый во вращение через передачу то барабана лебедки.
У всех типов кранов основными механизмами для перемещения грузов являются подъемные лебедки и механизмы передвижения. Это позволяет выделить ряд общих вопросов электропривода кранов: расчет статических нагрузок, выбор системы электропривода и другие. Так как двигатели обычно имеют угловую скорость, значительно большую чем скорость подъемного барабана или ходовых колес моста, то движение к рабочим органам механизмов
крана передается через редукторы. Для механизмов подъема наибольшее применение получили схемы с полиспастом при помощи которого движение от барабана передается крюку.
Тенденции развития кранов следующие: увеличение выпуска кранов большой грузоподъемности при снижении выпуска кранов малой грузоподъемности, расширение применения гидравлического привода и специализированного электропривода, применение кранов манипуляторов для выполнения массовых строительных работ: погрузочно–разгрузочных и монтажных.
Долгое время основными направлениями совершенствования подъемной техники были улучшение механической части и систем регулирования электропривода. Однако, современные требования к крановой технике предусматривают наличие определенной логики управления, что упрощает работу машиниста крана и делает функционирование системы более безопасным.
Развитие всех отраслей народного хозяйства в настоящее время определяется, прежде всего, машиностроением – новыми машинами, интенсифицирующими производственные процессы, обеспечивающими резкое повышение производительности труда. Это можно достигнуть, не только и не столько копируя и улучшая существующие в мировой практике модели, сколько создавая принципиально новые машины, базирующиеся на передовых достижениях техники.
1 Общая часть
1.1 Классификация кранов
По конструкции к кранам портального типа относятся:
Перегрузочные краны. Краны портальные перегрузочные используются в речных и морских портах, а также на промышленных объектах для грейферной перегрузки сыпучих грузов, для работы со штучными грузами и контейнерами, а также для перегрузки металлолома и металлопроката с помощью грузоподъёмных электромагнитов. Отличаются от монтажных более высокими режимами работы крана и узлов;
Монтажные. Монтажные краны предназначены для работ с ответственными штучными грузами. На монтажных кранах для их эффективного использования предусматривают изменение допустимой грузоподъёмности в зависимости от вылета;
Портальные кенгуровые краны. Краны с бункером на портале. Вращение исключено из рабочего цикла крана, тем самым повышается производительность.
Портальные краны имеют механизмы подъёма, изменения вылета, поворота и передвижения (передвижение является установочным движением, остальные — рабочими. Привод механизмов, как правило, электрический, но может быть и ручным. Управление механизмами осуществляется с пола, из кабины и дистанционно.
1.2 Назначение и особенности конструкции
Основное назначение портального крана – это погрузо – разгрузочные, монтажные работы, работы, связанные с обслуживанием технологических процессов в различных отраслях промышленности (рисунок 1.1). Область применения портальных кранов также включает работу с сыпучими грузами в портах, в плавучем доке, и еще на строительных площадках различных сооружений.
Портал представляет собой пространственную жесткую раму, которая может перекрывать от одного до трех железнодорожных путей, обеспечивая свободный пропуск подвижного состава. В некоторых случаях порталы заменяются Г–образными полупорталами. В этих случаях краны именуются полупортальными.
Механизмы передвижения состоят из приводных и неприводных тележек, объединённых системой балансиров. Длину плеч балансиров выбирают с учётом одинаковой нагрузки на всех колёсах.
В производстве и модернизации портальных кранов используются только
современные технологии и инновационные методы производства, что позволяет обеспечивать не только высокую производительность портальных кранов, но и продлевать срок их службы.
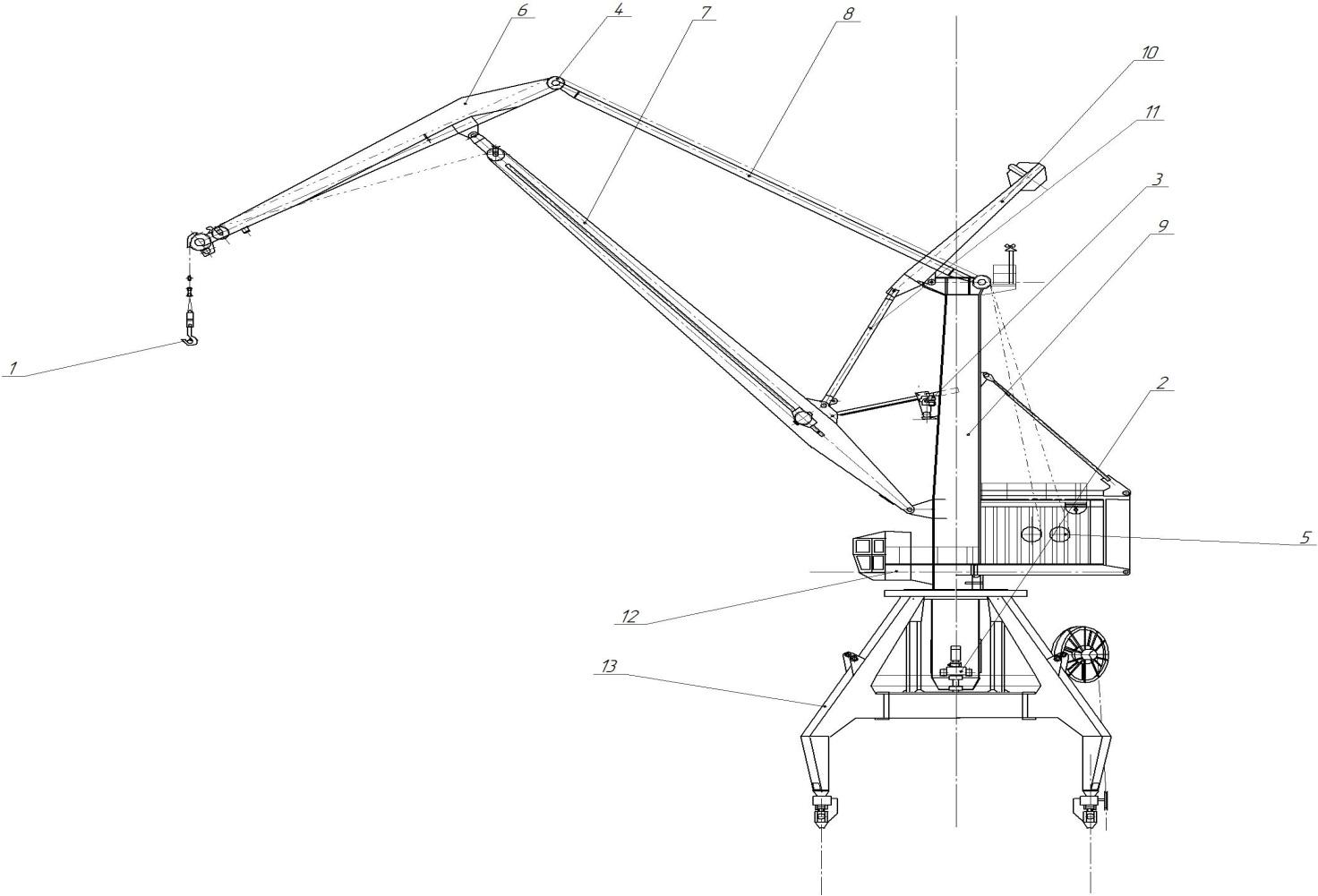 Рисунок
1.1 – Общий вид портального крана
Рисунок
1.1 – Общий вид портального крана
Подвеска крюковая;
механизм поворота;
механизм изменения вылета стрелы;
система канатных блоков;
механизм подъёма;
хобот;
стрела;
оттяжка;
колонна;
подвижный противовес;
коромысло;
кабина;
портал.
1.3 Кинематическая схема электропривода
На рисунке 1.2 приведена кинематическая схема механизма подъёма.
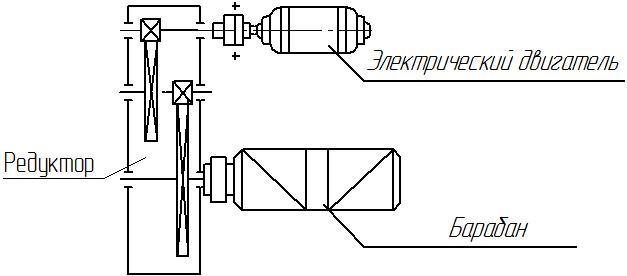
Рисунок 1.2 – Кинематическая схема электропривода механизма подъёма
1.4. Постановка задач на проектирование
Основной особенностью базовой системы электропривода является ступенчатое регулирование скорости. Релейно–контактные схемы имеют характерный недостаток: любое изменение силовой части привода или диаграммы его функционирования приводит к необходимости пересмотра структуры системы управления и состав средств САУ.
В связи со ступенчатым характером регулирования имеют место толчки момента двигателя, что отрицательно сказывается на механическом оборудовании, и соответственно, скорость передвижения также носит неравномерный характер. Это в первую очередь сказывается при низких скоростях, когда должна производиться точная остановка крана и поэтому производительность крана в сильной степени зависит от мастерства и опыта работы крановщика.
Постановка задач на проектирование:
проанализировать базовую систему электропривода механизма подъёма портального крана и наметить пути модернизации системы электропривода с целью улучшения технико – экономических показателей;
провести технико – экономическое обоснование модернизации системы электропривода;
модернизацию провести с учетом обеспечения безопасных условий труда при эксплуатации портального крана для ее обслуживающего персонала.
Для качественного выполнения своих функций электропривод крана должен отвечать следующим требованиям:
кратность перегрузки до λ = 3;
перерегулирования в σ = 3%;
время регулирования в tр = 1 с;
статическая просадка по скорости Δωс = 3%;
динамическая просадка по скорости Δωд = 7%.
Современные подъемно – транспортные машины характеризуется широким диапазоном грузоподъемности, габаритов обслуживаемых площадей, высокой производительностью.
Количественных ограничений по базовым параметрам для современных подъемно – транспортных машин не существует. Их создают для любых условий возможного применения. Имеются только экономические ограничения. Сложные тяжелые машины стоят дорого и применять их целесообразно лишь в том случае, если можно загрузить настолько, чтобы они окупались за реальный срок эксплуатации до морального и физического износа.
Базовыми направлениями развития подъемно – транспортного оборудования являются совершенствование приводов машин и механизмов, направленное на расширение диапазона регулирования скоростей, повышение их КПД и надежности, разработка новых конструктивных решений.
Металлоконструкции кранового оборудования следует совершенствовать путем применения качественного металла с целью, как снижения металлоемкости конструкции, так и повышения долговечности. Для снижения массы кранов и повышения технологичности изготовления создаются новые прогрессивные конструкции кранов: основные балки мостов выполняются двустенными, но со стенками разной толщины. С размещением подтележечного рельса над внутренней, более толстой стенкой, что позволяет разместить в балках электроаппаратуру крана; расширяется применение трубчатых и штампованных профилей, а в ряде случаев и легких металлов; повышается качество применяемых материалов и совершенствуется технология производства деталей.