

2.1.3. Пример затухающих колебаний
Рассмотрим случай, когда в подвеске имеется демпфирование (рис.2.10). Примем при расчетах массу m = 50000 кг, жесткость пружиныс = 1107 Н/м. Коэффициент сопротивления демпфера положим равным= 40000 Н/(м/с).
Вычисляем согласно (2.13) значения kи 2b:
k = 14,142,![]() ,
,
т. е. b= 0,4 иb < k, следовательно, в данном примере имеем случай 1 (малое сопротивление).
Частота затухающих колебаний
k*
=
![]() =
14,136
c–1
=
14,136
c–1
меньше, чем частота собственных колебаний k. Период затухающих колебанийТ*= 0,445 с, напротив, больше, чемТ = 0,444 с.

Рис. 2.10 Расчетная схема затухающих колебаний с демпфированием

Рис. 2.11 График затухающих колебаний
Декремент затухания (2.18) равен
 0,915.
0,915.
Зададим
начальные условия движения: при
t
=
0 z0
=
0,
![]() =
0,1 м/с. Тогда, согласно (2.17) находим
решение:
=
0,1 м/с. Тогда, согласно (2.17) находим
решение:
![]() .
.
График затухающих колебаний показан на рис. 2.11.
2.1.4 Вынужденные колебания при отсутствии сопротивления
В задачах механики транспортных средств основной причиной возникновения вынужденных колебаний являются неровности пути. В машинных агрегатах и механизмах они возникают в результате неточной балансировки вращающихся частей машин (коленчатых валов, маховиков, турбинных дисков) либо при наличии периодически изменяющихся сил давления пара или газов в цилиндрах двигателя и т.д.
В теории колебаний возмущающей называется сила, приложенная к материальной точке и заданная как непрерывная функция времени. Простейшей является возмущающая сила, изменяющаяся по гармоническому закону. Ее проекция на направление движения имеет вид
Qx = Qo sin t, (2.21)
где Qo – наибольшая величина возмущающей силы (амплитуда силы);
– частота возмущающей силы (частота возмущения).
Пусть на точку массы m, совершающую прямолинейное движение, действуют две силы (рис. 2.12):
1.
Восстанавливающая сила:
![]() .
.
2. Возмущающая сила вида (2.21).
Запишем дифференциальное уравнение движения точки:
![]() ,
,
![]()

Рис. 2.12 Схема вынужденных колебаний
Обозначая
![]() ,
,
![]() ,
,
получаем
![]() (2.22)
(2.22)
– линейное неоднородное дифференциальное уравнение 2-го порядка с постоянными коэффициентами.
Его решение ищем в виде суммы
х = х1 + х2, (2.23)
где х1 – общее решение однородного уравнения,
х2 – частное решение неоднородного уравнения со специальной правой частью.
Общее решение однородного уравнения возьмем в виде (2.4):
![]() . (2.24)
. (2.24)
Частное решение неоднородного уравнения ищем в виде
x2 = Сsint. (2.25)
Для
определения С
вычисляем вторую производную от x2
по времени
и подставляем x2
и
![]() в (2.22). Приравнивая нулю коэффициент при
sint,
находим
в (2.22). Приравнивая нулю коэффициент при
sint,
находим
 .
.
Следовательно, частное решение (3.25) принимает вид
![]() .
.
Согласно (2.23) получаем решение для случая, когда частота возмущения ω существенно отличается от частоты собственных колебаний k:
![]()
![]() .
(2.26)
.
(2.26)
Скорость точки получаем, вычисляя производную (2.26) по времени:
![]()
![]() . (2.27)
. (2.27)
Значения А и В найдем из начальных условий движения:
при t = 0 x = x0, V = V0.
Согласно (2.26) и (2.27) получаем
А
= x0,
![]() ,
,
Тогда (2.26) принимает вид
![]()
![]() . (2.28)
. (2.28)
Следовательно, движение представляет собой суперпозицию (наложение) собственных и вынужденных колебаний. Отметим, что при нулевых начальных условиях собственные колебания отсутствуют, а вынужденные колебания, не зависящие от начальных условий, состоят из двух гармоник: одна из них имеет частоту возмущающей силы , а другая – частоту собственных колебаний k.
В случае, если периоды
![]() и
и
![]() соизмеримы, движение будет периодическим,
если же несоизмеримы – то апериодическим.
соизмеримы, движение будет периодическим,
если же несоизмеримы – то апериодическим.
На рис. 2.13 показан график колебаний при Тk = 0,444 с и Т = 1,25 с.
Перейдем к рассмотрению случая, когда частота возмущающей силы близка к собственной частоте k:
![]() .
.

Рис. 2.13 График вынужденных колебаний
В выражении (2.26) будем
считать
![]() ,
но разность
,
но разность
![]() ,
и при нулевых начальных условиях получим
представление решения в виде произведения
двух гармоник:
,
и при нулевых начальных условиях получим
представление решения в виде произведения
двух гармоник:
![]()
![]() . (2.29)
. (2.29)
Первая гармоника изменяется медленно,
т. к. ее период
![]() велик, период второй гармоники практически
совпадает с периодом собственных
колебаний:
велик, период второй гармоники практически
совпадает с периодом собственных
колебаний:
![]() .
.
Такое движение называется биением, его график показан на рис. 2.14.

Рис. 2.14 График колебаний с биением
В заключение изучим случай совпадения частоты возмущающей силы с частотой собственных колебаний: ω=k. Запишем согласно (2.28) выражение для возникающих вынужденных колебаний:
![]() ,
,
при ω=kполучаем
неопределенность вида
![]() .
Раскрывая неопределенность по правилу
Лопиталя (переменной величиной являетсяω), находим:
.
Раскрывая неопределенность по правилу
Лопиталя (переменной величиной являетсяω), находим:

=
![]() . (2.30)
. (2.30)
Таким образом, при совпадении частот ωиkи отсутствии сопротивления происходит теоретически неограниченное возрастание амплитуды колебаний со временем (рис. 2.15). Это явление называетсярезонансом.

Рис. 2.15 График резонансных колебаний
В качестве примера рассмотрим возмущения вызванные неровностями пути. На рис. 2.16 показана механическая система, которая движется с постоянной скоростью v0.
Тело массы m через подвеску, состоящую из пружины жесткости с, опирается на колесо K, массой которого пренебрегаем. Колесо движется по пути с неровностью h=h(x), которая и является источником колебаний подпрыгивания.

Рис. 2.16 Модель движущейся механической системы
Неровность пути h(x) возьмем, например, в виде гармонической функции:
![]() ,
(2.31)
,
(2.31)
где x = v0t – закон движения вдоль оси Ох;
h0 – амплитуда неровности;
Lp – длина рельса.
Частота возникающей возмущающей силы равна
![]() . (2.32)
. (2.32)
На рис. 2.17 показан профиль неровности (2.31) при v0 =20 м/с, h0 = 0,01 м, Lp = 25 м.

Рис. 2.17 Профиль неровности пути
Пример вертикальных неровностей пути, полученный в результате путеизмерений на скорости v0=20 м/с, показан на рис. 3.18.

Рис. 2.18 График неровностей пути (по данным путеизмерителя)
Коэффициент динамичности и АЧХ. При
движении ПС частота возмущенияωпостоянно меняется (причиной этого в
основном является изменение скорости
движения). Поэтому необходимо определить
зависимость амплитуды вынужденных
колебаний от отношения частот
![]() :
:
 ,
,
где ![]() ,
,
![]() – величина статической деформации
пружины жесткостиспод действием
силыQ0.
– величина статической деформации
пружины жесткостиспод действием
силыQ0.
Введем в рассмотрение коэффициент динамичности
 , (2.33)
, (2.33)
он показывает, во сколько раз амплитуда колебаний, происходящих под действием возмущения с частотой ω, превосходит статическую деформацию.
График зависимости коэффициента
динамичности от отношения частот
![]() называется амплитудно-частотной
характеристикой (АЧХ) колебаний. При
отсутствии сопротивления она имеет
вид, показанный на рис. 2.19.
называется амплитудно-частотной
характеристикой (АЧХ) колебаний. При
отсутствии сопротивления она имеет
вид, показанный на рис. 2.19.
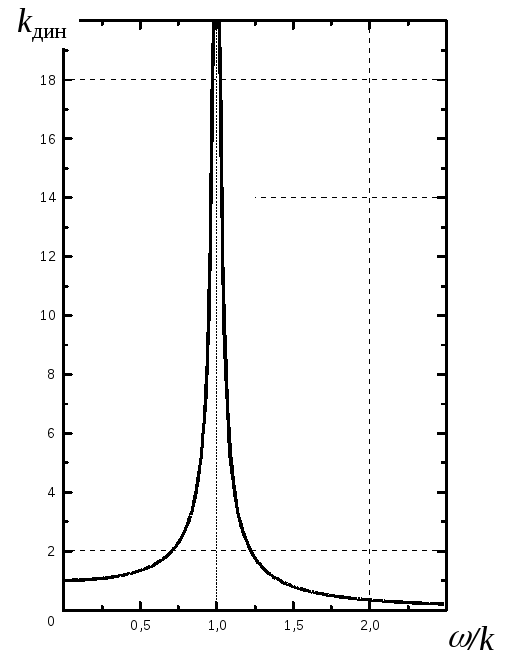
Рис. 2.19 Амплитудно-частотная характеристика (АЧХ) колебаний