

25. Анализ смещенных автоколебаний.
Анализ смещенных
колебаний отличается входным сигналом,
который становится ![]() ,
где
,
где ![]() – смещение. Смещение возникает, когда
присутствует несимметричная относительно
начала координат нелинейная характеристика,
либо есть постоянное возмущение. Метод
можно применять, только если нет
интеграторов, а также линейная часть
устойчива (нет полюсов в правой
полуплоскости). Сигнал на выходе
– смещение. Смещение возникает, когда
присутствует несимметричная относительно
начала координат нелинейная характеристика,
либо есть постоянное возмущение. Метод
можно применять, только если нет
интеграторов, а также линейная часть
устойчива (нет полюсов в правой
полуплоскости). Сигнал на выходе ![]() .
Коэффициенты
.
Коэффициенты ![]() зависят от амплитуды входного сигнала,
а также смещения:
зависят от амплитуды входного сигнала,
а также смещения:  ,
где
,
где ![]() .Тогда
эквивалентный коэффициент
.Тогда
эквивалентный коэффициент ![]() .
Периодическое решение будет являться
суммой двух решений: по постоянной
составляющей и по первой гармонике:
.
Периодическое решение будет являться
суммой двух решений: по постоянной
составляющей и по первой гармонике:
![]() .
Первое уравнение представим в виде
.
Первое уравнение представим в виде ![]() ,
тогда функция
,
тогда функция ![]() с параметром
с параметром ![]() выглядит:
выглядит:

где ![]() ,
очевидно. Таким образом, получаем наборы
пар решений
,
очевидно. Таким образом, получаем наборы
пар решений ![]()
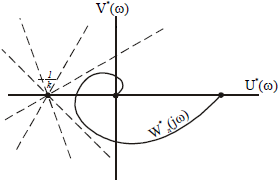
Теперь воспользовавшись
уравнением Гольдфарба, ищем пересечения
годографов ![]() .
Отмечаем на годографе нелинейной части
пары решений, опираясь на значения
.
Отмечаем на годографе нелинейной части
пары решений, опираясь на значения ![]() .
В случае, если эти точки не совпадают с
пересечениями с годографов линейной
части, двигаем их, соответственным
образом меняя и
.
В случае, если эти точки не совпадают с
пересечениями с годографов линейной
части, двигаем их, соответственным
образом меняя и ![]() и
и ![]() .
Частота годографа линейной части будет
частотой автоколебания, а амплитуда
нелинейной – амплитудой автоколебания.
.
Частота годографа линейной части будет
частотой автоколебания, а амплитуда
нелинейной – амплитудой автоколебания.
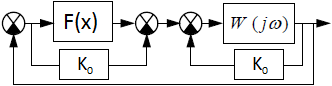
26. Применение метода гармонического баланса для исследования системы, имеющей более одной нелинейной статической характеристики.
Для использования
метода гармонического баланса для
системы с более чем одной нелинейностью,
требуется объединить все нелинейности
в одну (если между ними нет линейностей
– просто изменить статическую
характеристику), обозначив новую ![]() .
Линейную систему, которая будет заключена
между нелинейностями, стоит выбрать
самую простую из возможных, для уменьшения
погрешности метода гармонического
баланса. Если обозначить эквивалентные
коэффициенты
.
Линейную систему, которая будет заключена
между нелинейностями, стоит выбрать
самую простую из возможных, для уменьшения
погрешности метода гармонического
баланса. Если обозначить эквивалентные
коэффициенты ![]() и
и ![]() соответственно. Тогда
соответственно. Тогда ![]()
![]() .
.
Д ля
этих функций требуется построить
шаблоны, которые превратятся в семейства
графиков, зависимых отω.
Таким образом, чтобы найти решение,
требуется наложить шаблон на ЛАФЧХ
линейной части и на одной вертикали
пересекались АЧХ, ФЧХ и частота на
шаблоне и ЛАФЧХ совпадала. Из шаблона
находятся значения
ля
этих функций требуется построить
шаблоны, которые превратятся в семейства
графиков, зависимых отω.
Таким образом, чтобы найти решение,
требуется наложить шаблон на ЛАФЧХ
линейной части и на одной вертикали
пересекались АЧХ, ФЧХ и частота на
шаблоне и ЛАФЧХ совпадала. Из шаблона
находятся значения ![]() .
.
27. Критерий абсолютной устойчивости Попова.
Абсолютная
устойчивость – система устойчива при
любых колебаниях. Возьмем нелинейность
![]() ,
заданную
в секторе
,
заданную
в секторе ![]() :
:

Рассмотрим случай, если линейная часть – устойчива.
Тогда, положение
равновесия нелинейной системы (с
устойчивой линейной частью и нелинейной
характеристикой, заключенной в секторе
![]() )
будет абсолютно устойчивым, если
существует такое действительное число
α,
при котором для всех
)
будет абсолютно устойчивым, если
существует такое действительное число
α,
при котором для всех ![]() выполняется неравенство
выполняется неравенство ![]() .
.
Для однозначных нелинейностей α может лежать от -∞ до +∞, для неоднозначных же он строго больше нуля. Теорема дает достаточное условие устойчивости.
Геометрическая
интерпретация: введем модифицированную
передаточную функцию ![]() .
Тогда поставим в неравенство вместо
.
Тогда поставим в неравенство вместо
![]() его мнимую и действительную части:
его мнимую и действительную части: 
Раскроем выражение:
![]() ,
то есть как раз
,
то есть как раз ![]() .
Эти функции будут строиться в своих
координатах, поэтому логично будет
выразить
.
Эти функции будут строиться в своих
координатах, поэтому логично будет
выразить ![]() через
через ![]() :
:
![]() .
.
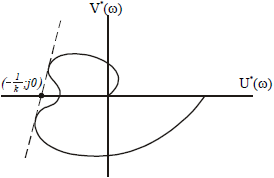
Равенство в этом
выражении дает уравнение прямой на
плоскости, где изображается модифицированный
годограф. В случае, если ![]() ,
для абсолютной устойчивости требуется,
чтобы модифицированный годограф лежал
целиком правее прямой, проходящей через
точку
,
для абсолютной устойчивости требуется,
чтобы модифицированный годограф лежал
целиком правее прямой, проходящей через
точку ![]() с угловым коэффициентом
с угловым коэффициентом ![]() :
:
Если годограф
охватывает точку ![]() ,
то абсолютной устойчивости не будет.
Или же возможен случай, при котором
годограф не охватывает точку, но линию
провести все равно нельзя. Таким образом
можно определить граничный коэффициент
наклона сектора статической характеристики
нелинейности:
,
то абсолютной устойчивости не будет.
Или же возможен случай, при котором
годограф не охватывает точку, но линию
провести все равно нельзя. Таким образом
можно определить граничный коэффициент
наклона сектора статической характеристики
нелинейности:
Рассмотрим теперь
случай, если линейная часть – неустойчива.
Требуется создать устойчивость в системе
посредством отрицательной обратной
связи. Преобразуем систему таким ![]() в обратной связи, чтобы линейная часть
системы стала устойчивой. Такую же
обратную связь вводим и в нелинейную
часть, но в параллельное соединение.
Теперь можно изобразить новую статическую
характеристику нелинейного элемента
и применять к ней критерий для устойчивой
системы:
в обратной связи, чтобы линейная часть
системы стала устойчивой. Такую же
обратную связь вводим и в нелинейную
часть, но в параллельное соединение.
Теперь можно изобразить новую статическую
характеристику нелинейного элемента
и применять к ней критерий для устойчивой
системы:
![]()