

ЛАБ.РАБ / lab_10
.pdfЛабораторная работа ¹ 10.
ИЗУЧЕНИЕ ЗАКОНА СОХРАНЕНИЯ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ С ПОМОЩЬЮ ГИРОСКОПА.
I. Цель работы: изучение закона сохранения момента импульса, определение угловой скорости прецессии и момента инерции гироскопа.
II. Описание установки.
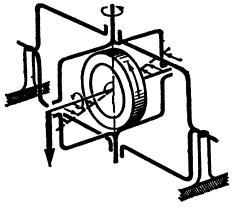
Лабораторная установка представлена на рисунке. На колонке установки закреплены кронштейн, фотодатчик и вращательный соединитель 1. Электродвигатель 2 закреплен на кронштейне 3. На валу двигателя закреплен диск 4, защищенный экраном. Рычаг 5, закрепленный на корпусе двигателя, имеет линейную шкалу. На рычаге закреплен груз 6, который можно перемещать и тем самым уравновешивать гироскоп.
|
Угол поворота гироскопа вокруг вертикальной оси можно |
||||||||||||||||||||
|
|
|
2 |
|
|
5 |
|
определить с помощью диска 7 с |
|||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нанесенной |
угловой |
шкалой |
è |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
указателя. |
|
Äèñê |
7 |
имеет |
íà |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
4 |
|
|
|
|
|
|
|
|
|
|
6 |
окружности |
отверстия |
через |
|||||||
|
|
|
|
|
3 |
|
|
||||||||||||||
|
|
|
|
|
|
|
7 |
|
каждые |
|
50 , |
|
которые |
||||||||
|
|
|
|
|
|
|
|
||||||||||||||
8 |
|
|
|
|
|
|
|
|
|
|
|
подсчитываются фотодатчиком |
è |
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
передаются в блок управления 8, |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
определяя |
|
таким |
образом |
óãîë |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поворота |
(прецессии) |
гироскопа |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вокруг |
вертикальной |
îñè |
ñ |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
помощью цифровых индикаторов, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
расположенных на лицевой панели. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
На лицевой панели расположены индикаторы, по которым определяется время прецессии и число оборотов двигателя.
III. Методика измерений и расчетные формулы. Гироскопбыстро вращающееся симметричное твердое
тело, ось вращения которого (ось симметрии) может изменять свое направление в пространстве. Гироскоп обладает рядом интересных свойств, наблюдаемых у вращающихся тел,
2
артиллерийских снарядов, детского волчка, роторов турбин, установленных на судах, и др. На свойствах гироскопа основаны разнообразные устройства или приборы, широко применяемые в современной технике.
Свойства гироскопа проявляются при выполнении двух условий: 1)ось вращения гироскопа должна иметь возможность изменять свое направление в пространстве; 2)угловая скорость вращения гироскопа вокруг своей оси должна быть очень велика по сравнению с той угловой скоростью, которую будет иметь сама ось при изменении своего направления.
Простейшим гироскопом является детский волчок, быстро вращающийся вокруг своей оси, которая может изменять свое положение в пространстве, поскольку ее конец не закреплен.
У гироскопов, применяемых в технике, свободный поворот оси гироскопа обеспечивают, закрепля гироскоп в рамках карданова подвеса (см.рис.), позволяющего оси ÀÂ занять любое положение в пространстве. Такой гироскоп имеет три степени свободы: он может совершать три независимых поворота вокруг осей ÀÂ, DE è GK, пересекающихся в центре подвеса Î, который остается по отношению к основанию неподвижным. Если центр
|
ω |
тяжести гироскопа совпадает |
|||
G |
E |
с центром |
O, òî |
гироскоп |
|
называется |
астатическим |
||||
|
|
||||
|
|
(уравновешенным), |
â |
||
ω1 |
α |
противном случаетяжелым. |
|||
|
B |
Первое |
|
свойство |
|
A |
O |
уравновешенного гироскопа с |
|||
K |
тремя степенями |
свободы |
|||
|
|||||
|
|
состоит в том, что его ось |
|||
F |
D |
стремится |
|
устойчиво |
|
сохранять |
â |
мировом |
|||
|
|||||
пространствеве приданное ей первоначальное направление.
Если эта ось вначале направлена на какуюнибудь звезду, то при любых перемещениях прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно осей, связанных с Землей.
3
Второе свойство гироскопаrобнаруживается, когда на его ось начинает действовать сила F, стремящаяся привести его в движение (т.е. создающая вращающийr момент относительно центра подвеса). Под действием силы F, приложенной к концу À îñè ÀÂ, гироскоп будет отклоняться не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе; в результате гироскоп вместе с рамкой начнет вращаться вокруг оси DE, притом не ускоренно, а с постоянной угловой скоростью w. Это вращение называется прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси AB сам гироскоп. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия, и ось AB остановится.
Величина угловой скорости прецессии определяется по формуле:
|
M |
|
Fh |
|
|
w = |
|
= |
|
, |
(1) |
|
|
||||
|
Jw1 sina |
|
Jw1 |
r |
|
ãäå M- момент силы F относительно центра O; a = ÐAOE; w1 - угловая скорость собственного вращения гироскопа вокруг оси ÀÂ; J- момент инерции гироскопа относительно той же оси; h = AO- расстояние от точки приложения силы до центра подвесаr гироскопа; последнее равенство имеет место, когда сила F параллельна оси DE (в частности, для тяжелого гироскопа).
Из формулы (1) видно, что прецессия происходит тем медленнее, чем больше w1 , точнее, чем больше собственный момент импульса гироскопа L = Jw1 .
Направление прецессии гироскопа показано на вышеприведенном рисунке стрелками.
Пусть угловая скорость w1 собственного вращения гироскопа значительно больше угловой скорости прецессии w. Угловаяrскоростьr r вращения гироскопа вокруг мгновенной оси равна: wà = w+ w1 . Тогда при условии w1 >> w мгновенная угловая скорость гироскопа в каждый момент времени равна угловой скорости его собственного вращения и направлена вдоль оси гироскопа. Поэтому можно считать мгновенную ось вращения и ось гироскопа совпадающими.
4
Тогда полный момент импульса можно считать равным моменту импульса собственного вращения гироскопа относительно его геометрической оси и направленным вдоль этой оси. Отсуда следует, что при ω1 >> ω движение оси гироскопаr будет совпадать с движением вектора момента импульса L, который определяется основным законом динамики
вращательногоr |
движения твердого тела: |
||
|
dL |
r |
|
|
|
= M, |
(2) |
|
dt |
||
|
r |
|
|
ãäå- M результирующий момент сил, действующих на систему.
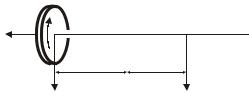
Теперь рассмотрим работу лабораторной установки, т.е. гироскопа (см. рис), состоящего из диска, который может вращаться вокруг горизонтальной оси, и противовеса Â.
Ось гироскопа шарнирно закреплена в точке Î вертикальной подставки. Противовес Â можно перемещать вдоль оси. Пусть груз массой m2 расположен таким образом, что точка Î является центром масс, тогда результирующий момент внешних сил, действующих на систему, относительно точки Î
равен нулю: |
M = −m1 gd1 + m2 gd2 |
= 0. |
|
|
|
|
|
|
|||||||||||
|
|
Если привести диск во вращение с угловой скоростью ω1 , |
|||||||||||||||||
то на основании формулы (2) получим: |
|
r |
|
r |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dL |
|
|
|||
r |
|
O |
|
O |
|
|
|
B |
O2 |
|
|
|
|
= M = 0, |
(3) |
||||
L |
|
|
|
|
|
|
dt |
||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
r |
r |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ω1 |
|
d1 |
|
|
|
|
|
|
|
|
ãäå |
L = Jω1 - |
момент |
||||||
|
|
|
|
|
d2 |
|
|
количества |
движения |
||||||||||
|
|
r |
|
|
|
|
|
r |
|
|
диска. |
Èç |
уравнения (3) |
||||||
|
m1 g |
|
|
|
|
|
m2 g |
|
|
следует, что в этом случаеr |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L = Jω1 |
= const и вектор L |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
r |
|
|
|
|
|
|
|
|
совпадает по направлению |
|||||||
с векторомω1 . Ось гироскопа при этом сохраняет свое положение в пространстве.
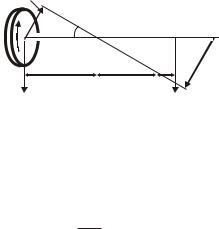
Переместим груз на расстояние x относительно первоначального положения (см. рис.). В этом случае момент
внешних сил относительно точки O не равен нулю: |
|
M = −m1 gd1 + m2 g( d2 + x ) = m2 gx. |
(4) |
5
Момент внешних сил направлен перпендикулярно плоскости рисунка и за плоскость.
Изменение момента импульса движения, происшедшее за
|
r |
O1′ |
|
|
|
|
|
|
|
|
|
|
время |
|
t, |
совпадает r |
ïî |
|||
|
L |
|
|
|
|
|
|
|
|
|
|
|
||||||||
O |
|
O |
B |
|
|
O2 |
направлениюr r с вектором M: |
|
||||||||||||
|
α |
|
|
|
||||||||||||||||
|
|
|
L = |
M |
t. |
|
|
(5) |
||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
d1 |
|
d2 |
|
|
|
|
|
|
|
Результирующий момент |
|||||||
|
|
|
|
|
x |
|
|
|
|
|
импульсаr r |
r |
|
будет |
равен |
|||||
|
|
|
r |
|
|
|
|
r |
|
O′ |
|
|
|
L′ = L + L, |
òî |
åñòü |
îñü |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
m1 g |
|
|
|
m2 g |
2 |
|
|
|
гироскопа |
|
за время |
t |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
повернется на угол Δα в |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
точка O |
|
|
|
|
|
|
|
|
|
|
горизонтальной |
|
плоскости, |
|||||||
переместится в положение O′, точка O |
- â O′ . В итоге |
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
2 |
|
|
ось гироскопа будет вращаться в горизонтальной плоскости с некоторой угловой скоростью ω, т.е. прецессировать. Величина
угловой скорости прецессии ω равна: |
|
α |
(6) |
ω = . |
t
Найдем связь между величинами момента импульса L, момента внешних сил M и угловой скорости прецессии. При
малом угле поворота имеем: |
(7) |
L = L α. |
Разделив обе части (7) на t, получим: |
L |
= L |
α |
|||||||
|
|
. |
||||||||
t |
|
|||||||||
Из формул (5) и (6) получим: |
|
t |
||||||||
|
|
|
|
|||||||
L = |
|
M |
, |
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
откуда, с учетом (4), имеем: |
|
|
|
|
||||||
|
|
M |
|
|
m2 gx |
|
|
|
||
ω = |
|
|
= |
|
. |
|
|
|
|
|
L |
|
|
|
|
|
|
||||
|
|
|
|
Jω1 |
|
|
|
|||
(8)
(9)
Из уравнения (9) следует, что с увеличением угловой скорости вращения гироскопа ω1 угловая скорость прецессии ω уменьшается. При этом, если угловая скорость вращения ω1
M
постоянна и ω1 >> ω, то отношение |
|
= L остается |
|
||
постоянным при изменении M. |
ω1 |
|
|
|
|
6
IV. Порядок выполнения работы.
1.При помощи перемещаемого груза установить рычаг гироскопа перпендикулярно вертикальной оси (ось гироскопа примет горизонтальное положение). Записать координату положения груза (положение равновесия).
2.Включить питание двигателя. Отрегулировать вращение
диска на число оборотов n1 (согласовать с преподавателем). Выждать1 минуту, пока ротор не начнет вращаться с
установившимся числом оборотов.
3.Поддерживая ось гироскопа в неподвижном состоянии, переместить груз на 1см вправо (относительно положения равновесия).
4.Нажать кнопку "СБРОС". После поворота гироскопа на угол не менее 300 нажать кнопку "СТОП".
5. Снять показания с секундомера t.
6.Повторить п.п. 4-5 3-5 ðàç.
7.Переместить груз на 2см влево (относительно положения равновесия) и провести измерения согласно п.п. 4-6.
8.Определить среднее арифметическое значение угловой скорости прецессии ωñ ð .
9.Проделать измерения, указанные в п.п. 2-8, для числа оборотов n2 è n3 (по согласованию с преподавателем).
10.Результаты измерений и расчетов представить в виде таблицы:
n |
Ì1 |
= |
|
|
|
Ì 2 |
|
|
|
|
||||
Δα |
t |
ω′ |
|
L |
J |
1 |
Δα |
t |
ω′′ |
L |
2 |
J |
2 |
|
|
|
|||||||||||||
|
|
|
ñ ð |
|
1 |
|
|
|
ñ ð |
|
|
|||
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

7
n3
V. Обработка результатов измерений.
1.По формуле (6) вычислить угловую скорость прецессии
ωдля всех проведенных экспериментов, а также их средние значения для трех величин оборотов двигателя.
2.По формуле (4) определить значение момента внешних
ñèë M1 , Ì 2 äëÿ õ1 = 1ñì, õ 2 = 2ñì.
3. По формуле (8) вычислить момент импульса L гироскопа для различных величин момента силы Ì и угловой скорости
прецессии ω. |
|
|
||||||
M1 |
Åñëè ω1 = const, то при данном числе оборотов двигателя |
|||||||
= |
M 2 |
. |
|
|
|
|||
ω′ |
|
|
|
|
||||
|
ω′′ |
|
|
|||||
ñ ð |
ñ |
ð |
|
|
|
|
||
|
Проверьте это положение. Запишите результаты расчетов. |
|||||||
|
4. Определить момент инерции гироскопа по формуле |
|||||||
|
J = |
|
L |
L |
||||
|
|
|
= |
|
. |
|||
|
|
|
||||||
|
|
|
|
ω1 |
2πn |
|||
Рассчитать также среднее значение момента инерции.
Контрольные вопросы.
1.Сформулируйте основной закон динамики вращательного движения.
2.Дайте определение момента силы относительно точки и оси вращения.
3.Что такое момент инерции? Дать матеметическое определение, выяснить, от чего он зависит и каков его физический смысл.
4.Дайте определение угловой скорости, углового ускорения. Как направлены эти векторы? Какова их связь с линейной скоростью и ускорением?
5.Что такое момент импульса тела, системы тел?
8
6.Сформулируйте закон сохранения момента импульса системы тел. Каковы условия применимости этого закона?
7.Что называется гироскопом? В чем состоит гироскопический эффект?
8.Пояснить устройство и принцип действия гироскопа, имеющего три степени свободы.
9.Когда возникает прецессионное движение гироскопа?
10.Какова зависимость угловой скорости прецессии ω от угловой скорости вращения ω1 гироскопа?
11.Как определяли угловую скорость прецессии в работе?
12.Поясните вывод рабочей формулы (9).