

Полное сопротивление фазы трансформатора:
![]() Ом, (6)
Ом, (6)
где ![]()
напряжение короткого замыкания
трансформатора, %;
напряжение короткого замыкания
трансформатора, %;
![]()
действующее значение фазовой ЭДС
вторичной обмотки, В;
действующее значение фазовой ЭДС
вторичной обмотки, В;
![]()
номинальный фазовый ток этой обмотки,
А.
номинальный фазовый ток этой обмотки,
А.
Активное сопротивление фазы трансформатора приведенное к вторичной обмотке:
 ,
Ом, (7)
,
Ом, (7)
где ![]() потери короткого замыкания, Вт.
потери короткого замыкания, Вт.
Для дальнейших расчетов необходимо определить эквивалентное сопротивление и индуктивность преобразователя.
Эквивалентное сопротивление RЭ определяется как сумма сопротивлений всех элементов силовой цепи, обтекаемых током в любой момент времени.
![]() Ом, (8)
Ом, (8)
где ![]() активное сопротивление силового
трансформатора; определяется схемой
силовой цепи ТП (для трехфазной мостовой
схемы
активное сопротивление силового
трансформатора; определяется схемой
силовой цепи ТП (для трехфазной мостовой
схемы![]() );
);
![]() активное сопротивление уравнительного
реактора, Ом;
активное сопротивление уравнительного
реактора, Ом;
![]()
активное сопротивление тиристора в
открытом состоянии, Ом;
активное сопротивление тиристора в
открытом состоянии, Ом;
![]()
коммутационное сопротивление
преобразователя, Ом;
коммутационное сопротивление
преобразователя, Ом;
m
кратность пульсаций выпрямленного
напряжения (для трехфазной мостовой
симметричной схемы
![]() ,
для трехфазной нулевой схемы
,
для трехфазной нулевой схемы![]() ).
).
Индуктивность
![]() определяется как сумма индуктивностей
элементов силовой цепи:
определяется как сумма индуктивностей
элементов силовой цепи:
![]() ,
Гн, (9)
,
Гн, (9)
где ![]() индуктивность
силового трансформатора, которая
определяется схемой выпрямления, Гн;
индуктивность
силового трансформатора, которая
определяется схемой выпрямления, Гн;
![]()
индуктивность уравнительного реактора,
если реактор выбран насыщающимися от
рабочего тока, то
индуктивность уравнительного реактора,
если реактор выбран насыщающимися от
рабочего тока, то
![]() .
.
Если силовая часть
выполняется без трансформатора, то на
входе ТП применяются токоограничивающие
реакторы. В этом случае вместо
![]() и
и![]() учитывается активное сопротивление и
индуктивность токоограничивающих
реакторов.
учитывается активное сопротивление и
индуктивность токоограничивающих
реакторов.
Выбор реакторов для системы ТП-Д
Выбор сглаживающего дросселя
При работе ТП на якорь двигателя необходим сглаживающий дроссель, который служит для сглаживания пульсаций выпрямленного тока, ограничивает зону прерывистых токов, ограничивает ток через вентили при К.З. на стороне постоянного тока или при опрокидывании инвертора.
Основными расчетными
параметрами дросселя являются его
номинальный ток
![]() и индуктивность
и индуктивность![]() .
.
При выборе дросселя по току необходимо обеспечить соотношение:
![]() (10)
(10)
Индуктивность сглаживающего дросселя:
![]() Гн, (11)
Гн, (11)
где ![]()
полная индуктивность якорной цепи.
полная индуктивность якорной цепи.
Требуемое значение
![]() можно
рассчитать, исходя из индуктивности
дросселя, определённой исходя из
следующих условий:
можно
рассчитать, исходя из индуктивности
дросселя, определённой исходя из
следующих условий:
а) ограничение зоны прерывистых токов
![]() Гн, (12)
Гн, (12)
где ![]() граничное значение непрерывного тока
(10 – 15%)IdН,
А;
граничное значение непрерывного тока
(10 – 15%)IdН,
А;
m кратность пульсаций выпрямленного напряжения;
![]() максимальный угол регулирования,
определяемый по заданному диапазону
регулирования скорости двигателя;
максимальный угол регулирования,
определяемый по заданному диапазону
регулирования скорости двигателя;
![]() (13)
(13)
где ![]() ЭДС
преобразователя, необходимая для
получения минимальной скорости вращения
двигателя, В.
ЭДС
преобразователя, необходимая для
получения минимальной скорости вращения
двигателя, В.
б) ограничение пульсаций выпрямленного тока
![]() Гн, (14)
Гн, (14)
где ![]() амплитуда основной гармонической
составляющей выпрямленного напряжения.
Для мостовой трёхфазной схемы составляет
амплитуда основной гармонической
составляющей выпрямленного напряжения.
Для мостовой трёхфазной схемы составляет![]() ,
В;
,
В;
![]() кратность гармоники (К=1,
2, 3). Для
мостовой и нулевой схем выпрямления
К=1;
кратность гармоники (К=1,
2, 3). Для
мостовой и нулевой схем выпрямления
К=1;
m – кратность пульсаций выпрямленного напряжения;
![]() номинальный выпрямленный ток
преобразователя, А;
номинальный выпрямленный ток
преобразователя, А;
![]()
допустимое действующего значение
основной гармоники тока, которое
выбирается от 2 до 15% в зависимости от
мощности двигателя, диапазона
регулирования, частоты вращения двигателя
и допустимого снижения зоны темной
коммутации.
допустимое действующего значение
основной гармоники тока, которое
выбирается от 2 до 15% в зависимости от
мощности двигателя, диапазона
регулирования, частоты вращения двигателя
и допустимого снижения зоны темной
коммутации.
в) ограничение тока при опрокидывании инвертора (рассчитывается в случае совместного управления группами тиристоров)
 Гн, (15)
Гн, (15)
где ![]() полное сопротивление якорной цепи ТПД,
Ом;
полное сопротивление якорной цепи ТПД,
Ом;
![]() ЭДС двигателя в момент опрокидывания
(
ЭДС двигателя в момент опрокидывания
(![]() ),
В;
),
В;
![]()
ток двигателя перед опрокидыванием (
ток двигателя перед опрокидыванием (![]() ), А;
), А;
![]() максимально
допустимый в течение одного полу периода
ток двигателя, А.
максимально
допустимый в течение одного полу периода
ток двигателя, А.
При выборе сглаживающего дросселя ориентируются на максимальную индуктивность LЯЦ, полученную в результате расчета по всем трем вариантам. Данные некоторых дросселей приведены в приложении 2 (табл. 2.). После выбора дросселя необходимо уточнить значение индуктивности якорной цепи по формуле:
![]() Гн, (16)
Гн, (16)
Выбор токоограничивающих реакторов
Для ограничения скорости нарастания тока через тиристоры и ограничения тока К.З. до допустимого уровня за время срабатывания защиты на вход преобразователя в случае отсутствия трансформатора (напряжение сети согласовано с напряжением питания преобразователя) устанавливаются токоограничивающие реакторы (ТОРы).
Требуемая индуктивность ТОР рассчитывается по выражению:
![]() Гн, (17)
Гн, (17)
где ![]()
ударный коэффициент;
ударный коэффициент;
![]() ударный ток тиристора, А.
ударный ток тиристора, А.
Основные данные токоограничивающих реакторов серии РТСТ приведены в приложении 2 (табл. 2).
Компоновка системы управления. Расчет регуляторов.
Система с однозонным регулированием скорости.
Наибольшее распространение при управлении ДПТ по якорной цепи получили две системы электропривода. Первая из них система с ПИ-регулятором скорости и обратной связью по току с отсечкой. Такая система управления применена в преобразователях типа ЭПУ1. В настоящее время наиболее предпочтительной является классическая система подчиненного регулирования (рис. 1), которая используется в отечественных (ЭПУ1М, ЭПУ3) и зарубежных приводах постоянного тока.
|
|
|
Рис. 1. Структурная схема ЭП с подчинённым регулированием |

В системе подчиненного регулирования скорости используются два регулятора: ПИ регулятор тока (РТ) и ПИ или Прегулятор скорости (РС). Расчет регуляторов ведётся в следующем порядке.
Настройка контура тока якоря выполняется на технический оптимум. Передаточная функция регулятора тока при такой настройке имеет вид:
![]() , (18)
, (18)
где ![]()
постоянная времени РТ якоря, с;
постоянная времени РТ якоря, с;
![]()
коэффициент усиления РТ якоря;
коэффициент усиления РТ якоря;
![]()
постоянная времени якорной цепи
электропривода, с;
постоянная времени якорной цепи
электропривода, с;
![]()
индуктивность якорной цепи электропривода,
Гн;
индуктивность якорной цепи электропривода,
Гн;
![]()
полное сопротивление якорной цепи, Ом;
полное сопротивление якорной цепи, Ом;
![]()
малая (некомпенсированная) постоянная
времени контура тока якоря;
малая (некомпенсированная) постоянная
времени контура тока якоря;
![]()
коэффициент усиления преобразователя;
коэффициент усиления преобразователя;
![]()
номинальное напряжение преобразователя,
В;
номинальное напряжение преобразователя,
В;
![]()
номинальное напряжение управления (для
преобразователя ЭПУ, принимается равным
15 В);
номинальное напряжение управления (для
преобразователя ЭПУ, принимается равным
15 В);
![]()
коэффициент обратной связи по току
якоря, Ом;
коэффициент обратной связи по току
якоря, Ом;
Параметры элементов РТ определяются следующим образом:
Из выражения
![]() задаваясь
задаваясь![]() находится
находится
![]()
![]() ,
Ом, (19)
,
Ом, (19)
Сопротивление на
входе регулятора тока
![]() находится из выражения:
находится из выражения:
![]() ,
Ом, (20)
,
Ом, (20)
Сопротивление
![]() в цепи обратной связи регулятора тока
находится из выражения:
в цепи обратной связи регулятора тока
находится из выражения:
![]() ,
Ом; (21)
,
Ом; (21)
для комплектных
преобразователей ЭПУ коэффициент
датчика тока KДТ
определяется из условия, что при
номинальном токе двигателя напряжение
на выходе датчика тока (подстраивается
сменным резистором)
![]() :
:
![]() ,
Ом. (22)
,
Ом. (22)
Тип передаточной функция регулятора скорости выбирается, исходя из обеспечения требуемой статической точности поддержания скорости в системе электропривода.
Определяется оптимальная неточность стабилизации скорости при использовании П - регулятора скорости по формуле:
![]() ,
с-1(23)
,
с-1(23)
где
![]() – полное сопротивление якорной цепи,
Ом;
– полное сопротивление якорной цепи,
Ом;
IC– статический ток якоря двигателя, обусловленный нагрузкой на валу, А.
Определяется неточность стабилизации скорости по заданию:
![]() ,
с-1, (24)
,
с-1, (24)
где Dтребуемый диапазон регулирования скорости.
Если оказывается,
что
![]() ,
то в контуре скорости возможно использовать
Прегулятор скорости.
В этом случае осуществляется настройка
контура скорости на технический оптимум.
,
то в контуре скорости возможно использовать
Прегулятор скорости.
В этом случае осуществляется настройка
контура скорости на технический оптимум.
Передаточная функция П регулятора скорости имеет вид:
![]() (25)
(25)
Если указанное выше неравенство не выполняется, то необходимо использовать ПИ регулятор скорости. При выборе РС таким образом контур скорости настраивается на симметричный оптимум. При такой настройке регулирование скорости будет астатическим.
Передаточная функция ПИ регулятора скорости имеет вид:
![]() . (26)
. (26)
В выражениях (25), (26):
![]() коэффициент
усиления РС;
коэффициент
усиления РС;
![]()
постоянная времени РС, с;
постоянная времени РС, с;
![]() коэффициент
обратной связи по скорости, Вс;
коэффициент
обратной связи по скорости, Вс;
![]()
коэффициент обратной связи по току
якоря, Ом;
коэффициент обратной связи по току
якоря, Ом;
механическая постоянная времени
электропривода, с;
механическая постоянная времени
электропривода, с;
![]()
суммарный момент инерции электропривода,
кгм2;
суммарный момент инерции электропривода,
кгм2;
![]()
момент инерции двигателя, кгм2;
момент инерции двигателя, кгм2;
![]()
приведенный
к валу двигателя момент инерции механизма,
кгм2;
приведенный
к валу двигателя момент инерции механизма,
кгм2;
![]()
конструктивный коэффициент двигателя,
Вс;
конструктивный коэффициент двигателя,
Вс;
Параметры элементов регулятора скорости находятся из соотношений:
Из выражения![]() ,
задаваясь
,
задаваясь
![]() ,
находится
,
находится
![]() .
.
Сопротивление на
входе регулятора скорости
![]() находится из выражения:
находится из выражения:
![]() , (27)
, (27)
Сопротивление
![]() в цепи обратной связи по скорости
находится из выражения:
в цепи обратной связи по скорости
находится из выражения:
![]() ,
Вс, (28)
,
Вс, (28)
где КДС = КBRдля электроприводов ЭПУ исполненияМ, Д, П, И;
![]() коэффициент передачи
тахогенератора (ТГ), Вс;
коэффициент передачи
тахогенератора (ТГ), Вс;
BR, UBR– номинальная скорость и напряжение на якоре ТГ соответственно;
КДС = kКДЕ для электроприводов ЭПУ исполнения Е, Вс;
![]()
коэффициент передачи датчика ЭДС;
коэффициент передачи датчика ЭДС;
ЕН – ЭДС двигателя при номинальной скорости;
UДЕ– напряжение на выходе датчика ЭДС, принимается равным 15В.
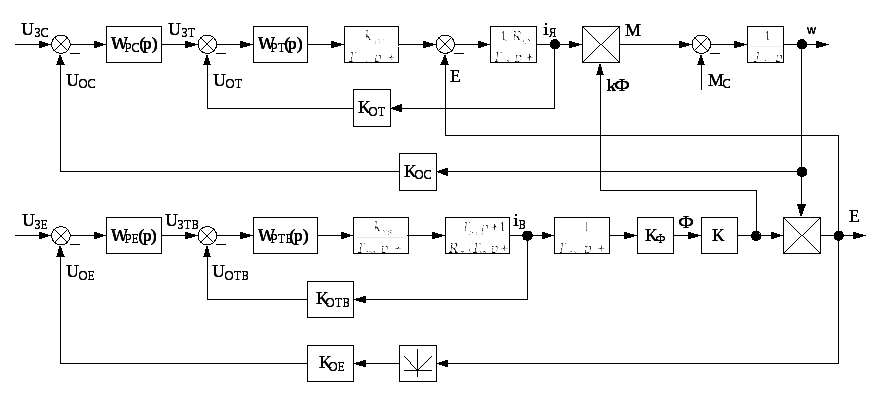
Система с двухзонным регулированием скорости (для Д/О).
Двухзонное регулирование скорости ДПТ применяется для обеспечения рабочего диапазона до скорости выше основной (чаще всего это Н). В такой системе независимая обмотка возбуждения ДПТ подключается к управляемому тиристорному возбудителю.Система управления электроприводом включает в себя две взаимосвязанные системы:
а) систему регулирования скорости, воздействующую на напряжение ТП, и обеспечивающую работу в первой зоне;
б) систему регулирования ЭДС, воздействующую на напряжение ТВ, и обеспечивающую работу во второй зоне. Она включает в свой состав регулятор ЭДС РЭ с подчиненным контуром регулирования тока возбуждения с регулятором тока возбуждения РТВ.
Структурная схема для регулирования скорости в первой зоне организуется по тому же принципу, что и при однозонном регулировании. Общая структурная схема СУЭП с двухзонным регулированием скорости с регулятором скорости и подчиненным контуром регулирования тока якоря представлена на рис. 2.
Настойка контуров регулирования скорости и тока якоря ничем не отличается от настройки соответствующих контуров в системе с однозонным регулированием скорости.
Настройка регуляторов тока возбуждения и ЭДС, обеспечивающих работу электропривода во второй зоне осуществляется следующим образом.
Передаточная функция ПИ - регулятора тока возбуждения (РТВ) имеет вид:
![]() , (29)
, (29)
где TРТВ = TВпостоянная времени регулятора тока возбуждения, с;
![]() суммарная
постоянная времени обмотки возбуждения
ДПТ, с;
суммарная
постоянная времени обмотки возбуждения
ДПТ, с;
![]() индуктивность
обмотки возбуждения двигателя, Гн;
индуктивность
обмотки возбуждения двигателя, Гн;
![]() полное сопротивление
обмотки возбуждения двигателя, Ом;
полное сопротивление
обмотки возбуждения двигателя, Ом;
![]() коэффициент усиления
РТВ;
коэффициент усиления
РТВ;
![]() малая постоянная
времени контура тока возбуждения, с;
малая постоянная
времени контура тока возбуждения, с;
![]() – коэффициент обратной связи по току
возбуждения, Ом.
– коэффициент обратной связи по току
возбуждения, Ом.
Параметры элементов регулятора тока возбуждения определяются следующим образом:
Из выражения:
![]() ,
задаваясь
,
задаваясь![]() находится
находится
![]()
Сопротивление на
входе регулятора тока
![]() находится из выражения:
находится из выражения:
![]() . (30)
. (30)
Сопротивление
![]() в цепи обратной связи регулятора тока
возбуждения находится из выражения:
в цепи обратной связи регулятора тока
возбуждения находится из выражения:
![]() ,
Ом; (31)
,
Ом; (31)
коэффициент датчика тока возбуждения KДТВ определяется аналогично KДТ:
![]() ,
Ом. (32)
,
Ом. (32)
В контуре регулирования ЭДС отсутствуют большие постоянные времени, и при настройке на технический оптимум в качестве регулятора ЭДС используется интегральный регулятор.
Передаточная функция И-регулятора ЭДС имеет вид:
![]() , (33)
, (33)
где ![]() коэффициент усиления
регулятора ЭДС;
коэффициент усиления
регулятора ЭДС;
Параметры элементов регулятора тока определяются из выражений:
Постоянная времени
регулятора ЭДС находится из выражения:
![]() .
Задаваясь
.
Задаваясь![]() находится
находится
![]()
![]()
коэффициент обратной связи по ЭДС;
коэффициент обратной связи по ЭДС;
![]()
коэффициент, характеризующий форму
кривой намагничивания на линейном
участке, где
коэффициент, характеризующий форму
кривой намагничивания на линейном
участке, где
ФН, IН – номинальный магнитный поток и ток возбуждения ДПТ;
![]()
конструктивный коэффициент ДПТ, где
конструктивный коэффициент ДПТ, где
pП – число пар полюсов;
N – число проводников обмотки якоря;
a– число пар параллельных ветвей обмотки якоря.
|
|
|
Рис. 2. Структурная схема системы двухзонного регулирования скорости ДПТ |
Динамический расчёт спроектированной САР
В этом разделе курсового проекта необходимо рассчитать переходные процессы в разработанном электроприводе. На основе анализа переходных процессов необходимо дать инженерную оценку качества регулирования скорости и тока двигателя.
Переходные процессы могут быть рассчитаны в САПР System View, которая позволяет на уровне структурных моделей производить расчеты и получать результаты в виде таблиц, графиков переходных и частотных характеристик, а также комплексных показателей качества.
В данном проекте необходимо произвести моделирование следующих динамических режимов работы электропривода:
Для нереверсивных ЭП с однозонным регулированием необходимо рассчитать переходные процессы пуска в режиме холостого хода и под нагрузкой до номинальной скорости. Также моделируется режим наброса нагрузки.
Для реверсивных ЭП с однозонным регулированием необходимо рассчитать переходные процессы пуска и реверса под нагрузкой (характер нагрузки выбирается в соответствии с заданием).
Для двухзонных ЭП моделируются переходные процессы пуска под нагрузкой в первой зоне с последующим выходом во вторую зону регулирования скорости.
Для всех вариантов на формат выносится структурная схема СУЭП, схема модели в SystemView, графики переходных процессов скорости, тока (момента) и ЭДС для СУЭП с двухзонным регулированием. Графики переходных процессов также вкладываются в приложение пояснительной записки.
Требования к оформлению курсового проекта
Расчетно-пояснительная записка курсового проекта оформляется на листах формата А4, а графическая часть на листах формата А1. Оформление проекта должно соответствовать требованиям ЕСКД.
Пояснительная записка может быть выполнена рукописно (разборчивым почерком), или на ПЭВМ. При выполнении компьютерным способом необходимо придерживаться следующих требований: шрифт – Times New Roman, 14 пунктов; интервал – полуторный; выравнивание – по ширине, без переносов.
Расчетно-пояснительная записка должна содержать титульный лист, оглавление с указанием начальных страниц разделов проекта, задание с указанием необходимых данных и требований, результаты выбора элементов, все расчеты, схемы, таблицы и графики, а также обоснование принятых решений, заключение и список использованной литературы. Материал в записке располагается согласно программе работы. Образец титульного листа записки приведен в приложении 1.
Записка пишется на одной стороне листа с полями по всем четырем сторонам. Размер левого поля – 35 мм; правого – не менее 10 мм; верхнего и нижнего – не менее 20 мм. Все листы записки, включая рисунки, схемы и графики нумеруются, начиная с титульного листа. Все расчеты в проекте должны выполняться в системе СИ. Сначала записываются формулы в общем виде, затем подставляются численные значения и указывается окончательный результат с соответствующей размерностью. После этого, если необходимо, следует расшифровка буквенных обозначений. Приводимые в записке формулы и методика расчета должны иметь ссылки на использованную литературу. Результаты расчета кривых по «точкам» сводятся в таблицы и иллюстрируются графиками. При рукописном выполнении схемы и графики выполняются на миллиметровой или белой нелинованной бумаге; при машинном в известных САПР. Все рисунки, схемы, графики и таблицы обязательно нумеруются.
На чертежных листах приводятся: функциональная схема спроектированной СУЭП, схема подключения электропривода, статические механические или электромеханические характеристики системы, структурная схема СУЭП, схема модели в System View, графики переходных процессов.
Схемы и графики на листах должны иметь названия, а листы – соответствующий штамп.