

3.2. Построение желаемой лачх системы в разомкнутом состоянии
При
построении желаемой ЛАЧХ
системы в разомкнутом состоянии в
соответствии с требованием обеспечения
перерегулирования
по задающему воздействию не более 30%
необходим (согласно рис. 11) запас по фазе
45
и по амплитуде L0,75
лог.
Это соответствует фазе
![]() в
частоте срезаС
скорректированной САУ
в
частоте срезаС
скорректированной САУ
![]() или
согласно формулам (3.2) и (3.3)
или
согласно формулам (3.2) и (3.3)
![]() лог.
(3.4)
лог.
(3.4)
Следует учитывать, что требование минимального времени регулирования выполняется при максимально возможной величине частоты С скорректированной системы, а требование максимального ослабления возмущений выполняется при минимальном уменьшении координат LР в области низких частот (до с).
Частоту
сопряжения участков желаемой ЛАЧХ
![]() с различными наклонами следует выбирать
с таким расчетом, чтобы передаточная
функция корректирующего устройства
была бы реализована наиболее просто.
Последнее достигается, если частоты
сопряжения участков желаемойЛАЧХ
выбирать равными частотам звеньев
исходной некорректированной системы.
Тогда следует принять частоту сопряжения
участков с наклонами -1 лог/дек и -2 лог/дек
равной Д,
участков с наклонами -2 лог/дек и -3 лог/дек
– равной Ф,
и частоту сопряжения 4
участков с наклонами -3 лог/дек и -4
лог/дек достаточно высокой, чтобы она
не влияла на запасы устойчивости L
и .
Для такой конфигурации
с различными наклонами следует выбирать
с таким расчетом, чтобы передаточная
функция корректирующего устройства
была бы реализована наиболее просто.
Последнее достигается, если частоты
сопряжения участков желаемойЛАЧХ
выбирать равными частотам звеньев
исходной некорректированной системы.
Тогда следует принять частоту сопряжения
участков с наклонами -1 лог/дек и -2 лог/дек
равной Д,
участков с наклонами -2 лог/дек и -3 лог/дек
– равной Ф,
и частоту сопряжения 4
участков с наклонами -3 лог/дек и -4
лог/дек достаточно высокой, чтобы она
не влияла на запасы устойчивости L
и .
Для такой конфигурации
![]() L
определяется координатой при абсциссе,
лежащей на середине отрезка между lgД
и lgФ,
т.е. должно соблюдаться неравенство
L
определяется координатой при абсциссе,
лежащей на середине отрезка между lgД
и lgФ,
т.е. должно соблюдаться неравенство
![]() лог
лог
или
![]() .
(3.5) Аналогично определимLН(С)
= 1 лог
(поскольку наклон
.
(3.5) Аналогично определимLН(С)
= 1 лог
(поскольку наклон
![]() до
частотыС
равен
-1 лог/дек, а lgkPМАКС>1),
до
частотыС
равен
-1 лог/дек, а lgkPМАКС>1),
![]() .
.
Тогда, согласно (3.4)
![]() лог,
лог,
отсюда ![]() . (3.6)
. (3.6)
Частота С среза желаемой ЛАЧХ принимается равной наименьшему из значений, рассчитанных по формулам (3.5) и (3.6).
по
(3.5) ![]() ,
,
по
(3.6) ![]() .
.
Выбираем
![]() .
.
По
приведенной выше методике может быть
определена частота среза и построена
желаемая ЛАЧХ
![]() и иной конфигурации. Таким образом,
желаемаяЛАЧХ
строится по следующим значениям:
и иной конфигурации. Таким образом,
желаемаяЛАЧХ
строится по следующим значениям:
![]() ;
; ![]() ;
;![]() .
.
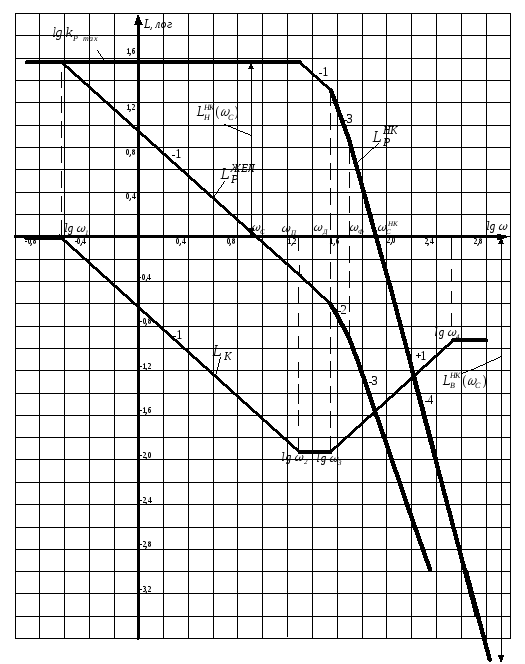
Рис. 12. Построение ЛАЧХ: некорректированной САУ, желаемой и коррекции
3.3. Нахождение лачх последовательного корректирующего устройства, определение передаточной функции корректирующего устройства
Динамическая
составляющая ЛАЧХ
![]() корректирующего
устройства (коэффициент передачиk1
учтен в kP
max)
получается путем вычитания зависимости
корректирующего
устройства (коэффициент передачиk1
учтен в kP
max)
получается путем вычитания зависимости
![]() из
из![]() ,
т.е.
,
т.е.![]() .
ПолнаяЛАЧХ
корректирующего устройства
.
ПолнаяЛАЧХ
корректирующего устройства
![]() .
.
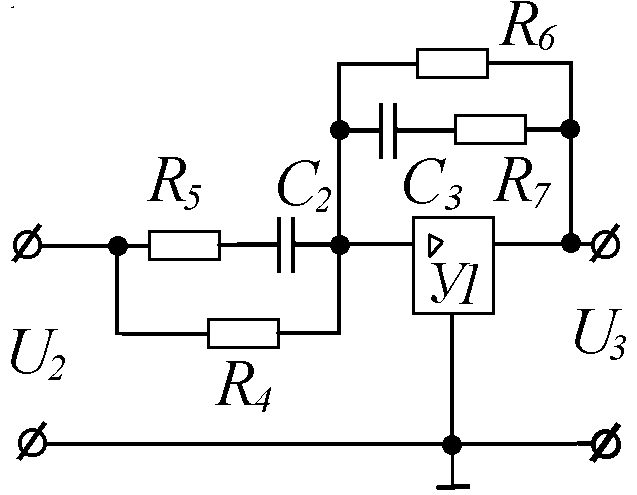
В качестве схемотехнической реализации корректирующего устройства может быть рекомендован ОУ, включенный по схеме рис.13.
|
|
|
Рис. 13. Схема включения корректирующего устройства |
Используя методику, изложенную к первой части задания, можнополучить выражение передаточной функции в виде
 .
(3.7)
.
(3.7)
Постоянные
времени числителя передаточной функции
соответствуют частотам сопряжения
аппроксимированной ЛАЧХ
![]() с положительным переходом, т.е. с наклона
-1 на 0 или с 0 на +1, а знаменатель - частотам
сопряжения участков
с положительным переходом, т.е. с наклона
-1 на 0 или с 0 на +1, а знаменатель - частотам
сопряжения участков![]() с отрицательным переходом, т.е. с 0 на -1
или с +1 на 0, если следовать по
с отрицательным переходом, т.е. с 0 на -1
или с +1 на 0, если следовать по![]() в сторону возрастания частот.
в сторону возрастания частот.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
Из выражения передаточной функции можно составить систему уравнений
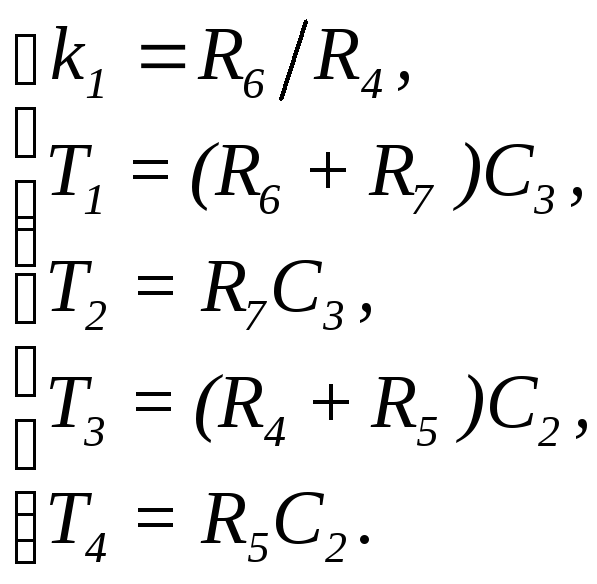
Для решения этой системы необходимо выбрать один из параметров С2=1мкФ, тогда:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.