

Курсовая раб / 22-25
.doc22
В пределе при р(с)=-180система находится на грани устойчивости, и в ней возникают незатухающие колебания с частотой к=с. Амплитуда поправки при этом равна нулю, а Lп, т.е. результирующая ЛАЧХ имеет бесконечное возрастание (разрыв) в частоте среза.
Установившееся значение регулируемой величины определяется значением результирующей ЛАЧХ области малых частот (при =0, lg= - в пределе), поэтому следует обратить внимание на определение поправок в области низких частот.
Известно, что конфигурация результирующей ЛАЧХ минимально фазовой системы однозначно определяет вид переходной функции, т.е. зависимости от времени выходной величины Х(n в нашем случае) при ступенчатом воздействии f(Uзад, Uс или Мс для рассматриваемой САУ) на входе. При этом:
1) установившееся значение выходной величины определяется ординатой ЛАХ при нулевой частоте, т.е. Х=f·10L(0);
2) переходный процесс протекает без перерегулирования, если ордината ЛАЧХ во всех частотах не превышают ординаты ЛАХ при нулевой частоте;
3) максимум ЛАХ свидетельствует о том, что переходной процесс протекает с перерегулированием;
4) переходный процесс до достижения максимума протекает приблизительно по экспоненте, сдвинутой на время постоянного запаздывания. Экспонента стремится к значению Хмакс=f·10Lмакс и имеет постоянную времени, которая определяет изменение наклона ЛАЧХ с 0 на –1. Время постоянного запаздывания равно сумме постоянных времени, определяющих дальнейшее увеличение отрицательного наклона ЛАХ в области высоких частот;
5) переходный процесс после достижения максимума идёт приблизительно по экспоненте постоянной времени, которая определяет изменения наклона аппроксимированной ЛАХ с +1 на 0.
Определение показателей регулирования по результирующей ЛАЧХ минимально-фазовой САУ основано на построении приближённой кривой переходного процесса. При этом можно рекомендовать следующую методику:
1. Построить точную ЛАЧХ САУ.
2. Аппроксимировать полученную ЛАЧХ отрезками прямых с наклонами 1, 0, -1, -2… лог/дек. При этом будут получены аппроксимированные ЛАЧХ типа 1, 2, 3 рис. 8 а.
3. Определить частоты точек сопряжения отрезков с +1 и 0 наклоном –1/0; с 0 и -1 наклоном –1/1; с -1 и -2 наклоном –1/2 и т.д.
4. Определить значение амплитуд, соответствующих максимальным и установившимся значениям ЛАЧХ (КI= f·10Lмакс, К2= f·10L(0)).
5. На оси времени кривой переходного процесса (рис. 8 б) отложить отрезок, соответствующий 2+3+4…, и из полученной точки на прямую КI отложить подкасательную 1 и экспоненту соответствующую кривой нарастания Х.
23
6. Для ЛАЧХ типа 1 кривая переходного процесса Х(t) может быть получена путём плавного перехода из начала координат на полученную экспоненту.
7. Для ЛАЧХ типа 2 и 3 необходимо построить экспоненту с подкасательной 0, соответствующую спадающему участку кривой переходного процесса. Результирующая кривая 2, 3 переходного процесса может быть получена путём
плавного перехода с нарастающего участка на экспоненту, соответствующую спадающему участку кривой переходного процесса до установившегося значения (К2, 0).
8.
Наличие острого всплеска в ЛАЧХ 4, 5,
вызванного отрицательными поправками
в частоте среза 1/1
при построении результирующей ЛАЧХ
встречно- параллельного соединения
звеньев, свидетельствуют о наличие
затухающих колебаний в кривой переходного
процесса. При этом как частота колебаний
![]() (период Тк=2/к),
так и постоянная времени затухания Т1/
зависит от коэффициента демпфирования
.
По аналогии с колебательным звеном
может быть определено высотой
всплеска ЛАЧХ типа 4, т.е. =10-/2.
Построение приближённой кривой
переходного процесса сводится к
построению огибающей с подкасательной
1/,
запаздывающей на время 2+3+…
и вписанной между огибающими колебаний
с периодом Тк.
При этом, огибающие строятся для
переходной функции, соответствующей
ЛАЧХ 4, относительно установившегося
значения КI,
а для ЛАЧХ 5 относительно экспоненты,
спадающей до значения К2.
(период Тк=2/к),
так и постоянная времени затухания Т1/
зависит от коэффициента демпфирования
.
По аналогии с колебательным звеном
может быть определено высотой
всплеска ЛАЧХ типа 4, т.е. =10-/2.
Построение приближённой кривой
переходного процесса сводится к
построению огибающей с подкасательной
1/,
запаздывающей на время 2+3+…
и вписанной между огибающими колебаний
с периодом Тк.
При этом, огибающие строятся для
переходной функции, соответствующей
ЛАЧХ 4, относительно установившегося
значения КI,
а для ЛАЧХ 5 относительно экспоненты,
спадающей до значения К2.
ЛАЧХ рассматриваемой системы по задающему воздействию имеет вид ЛАЧХ типа 1 или 4 (рис. 8), а ЛАЧХ по возмущающему воздействию Uс или Мс – типа 2, 5.
По полученной кривой переходного процесса n(t) определяются основные показатели регулирования: время регулирования tp, перерегулирование =(nмакс-n)/n и колебательность М=tp/Tк. Учитывая малую величину n (см. п. 2.4 задания), в рассматриваемой САУ имеет большие значения (порядка нескольких десятков), т.е. динамические отклонения будут много больше статических.
Уточненный расчет кривой переходного процесса n(t) по возмущающему воздействию (п.3.6 задания) может быть проведен моделированием на ЭВМ.
Наиболее удобен расчет с использованием программ PDS и System View, при этом в пояснительной записке необходимо привести следующие параметры:
1. Структурную схему, записанную в программе. Для сокращения времени расчета на ЭВМ в качестве исходной структурной схемы следует брать не преобразованную структурную схему (рис. 5 а) с отброшенными входными воздействиями за исключением UC или МС. При расчете САУ по воздействию МС сумматор перед звеном WЭВ(р) следует перенести через звено по ходу сигнала.
24
2. Распечатки рабочей программы, графики n(t) и показатели регулирования. Рекомендуется время переходного процесса брать 30 (см. методические указания к п. 3.5, рис. 8).
По результатам расчёта производится сравнительная оценка показателей регулирования, полученных по пп. 3.6, 3.5 и 2.4
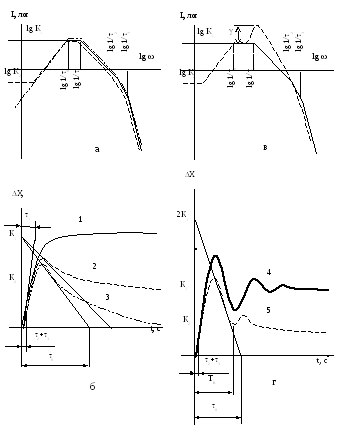
Рис. 8. Построение приближенной переходной функции
(б, г) по результирующей (а, в) минимально-фазовой системы
25
В заключении пояснительной записки приводится библиографический список литературы.
Общие методические указания
Пояснительная записка оформляется на листах формата А4 в сброшюрованном виде или в обычной школьной тетради. Все графики выполняются на миллиметровой бумаге. Если на одном графике приведено несколько кривых, то их желательно выполнить линиями различного цвета.
При построении ЛЧХ рекомендуется масштаб: 1 декада частоты – 50 мм.
Для L – 50 мм на 1 лог=10 дл=20 дб; для - 45 мм на 90.
В методических указаниях все примеры и выкладки даны для L в масштабе лог(lg10=1 лог). Учитывая, что в научной литературе для размерности L часто применяются децилоги (дл) и децибелы (дб), студенты могут выполнять работу в любой из указанных размерностей.
Выполненная курсовая работа сдаётся преподавателю для проверки в установленном порядке.
При неправильно выполненной работе преподаватель ставит отметку «см.» (смотрено) с указанием замечаний и возвращает работу студенту. При правильно выполненной работе ставится отметка «к защите», и работа возвращается студенту. Защита работы проводится в установленные сроки путём собеседования с преподавателем.
Библиографический список
1. Теория автоматического управления: Учебник для вузов /Под ред. А.В. Нетушила. – 2-е изд. – М.: Высш. шк., 1976. – 400 с.
2. Куропаткин П.В. Теория автоматического управления: Учеб. пособие. – М.: Высш. шк., 1973. – 527 с.
3. Солодовников В.В. Основы теории и элементы систем автоматического регулирования: Учеб. пособие. – М.: Машиностроение, 1985. – 536 с.
4. Теория автоматического управления /Под ред. А.А.Воронова. Ч. 1. – М.: Высш. шк., 1977.
5. Макаров Н.М., Менский Б.М. Линейные автоматические системы. – М.: Машиностроение, 1982.
6. Борцов Ю.А., Суворов Г.Б. Методы исследования динамики сложных систем электропривода. – М.;Л.: Энергия, 1966.